
基于无人机光纤捷联航姿系统修理研究
2020-06-02 19:31赵剑赵洪甲
装备维修技术 2020年23期
赵剑 赵洪甲

摘 要:光纤捷联航姿系统是一种新型的惯性系统,由于其省去机电式实体工作台,补偿后采用“数学平台”实时解算出相关信息,其成本、重量和体积都比平台式惯性系统大降低,而可靠性大为提高。在维护使用上也带来了很多方便。国外无人机快速发展,光纤捷联航姿系统已被广泛使用。国外无人机已到达阶段性检查期,本文对其修理阶段工作进行研究,形成装备修理保障能力。
关键词:无人机;光纤捷联航姿系统;测量方法;校准
引言
光纤捷联航姿系统是某型无人机飞行传感器系统的重要組成部分,为无人机无人机管理计算机提供快速内回路控制信号,接收起降引导接收机和无人机管理计算机的辅助信息,经解算向无人机管理计算机输出完成的无人机三轴角速率、三轴过载、姿态航向、位置和速度等信息,为无人机管理计算机提供回场控制。光纤捷联航姿系统由航姿部件、GPS天线和安装托架组成,安装托架是光纤航姿与无人机之间的机械接口,光纤捷联航姿通过安装托架固定在无人机上,采用快卸方式,便于维护和更换。同时对于安装托架的安装误差要求比较高,与无人机水平轴的夹角不大于0.1°,与无人机航向轴的夹角不大于0.2°。如何做到安装误差越小,研究简单有效的测量方法就成为摆在工程技术面前的一项紧急迫切的任务,现经过实验和工作实践,对此做出分析。
1 工作原理
光纤航姿系统的基本原理是根据牛顿定律,利用陀螺仪、加速度计等惯性元件感受载体在运动过程中的加速度,通过计算机进行积分运算,从而得到载体的姿态、速度、位置等导航参数,工作原理见图1。光纤航姿纯惯性位置和速度误差随航行时间而增长,满足不了无人机长航时导航精度要求,需要定期加以修正。光纤航姿采用二阶阻尼算法,对起降引导接收机发送的卫星定位信息与自解算的纯惯性导航信息进行组合。
2 安装
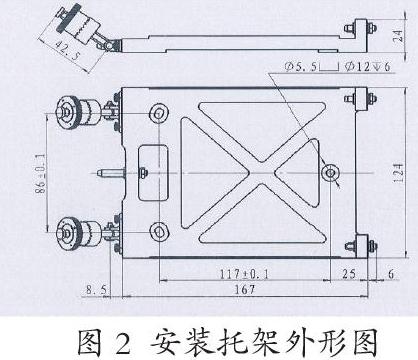
航姿部件安装在无人机中轴线附近,通过3个直径5.5mm通孔安装支架与载体进行固定安装,注意航姿部件与对应挂点基准对齐。航姿部件与无人机轴线之间的安装误差必须在下列公差范围内:俯仰和横滚:0.1°,航向:0.2°。将航姿部件沿安装支架组件导轨推入到定位销并用销紧螺栓紧固。安装支架组件外形图见图2。
3 安装校准
航姿托架与光纤捷联航姿机箱的接触面与无人机水平面的夹角不大于0.1°。具体方法如下:无人机调至水平状态,将成品托架置于系统地板上,紧固3个安装钉,通过水平仪测量成品托架上表面定位面的水平精度,如不满足要求,需将托架拆卸,调整成品托架同机体连接处垫片厚度达到精度要求,加垫后安装螺钉可适当加长。
航姿托架与光纤捷联航姿机箱的接触面与无人机航向的夹角不大于0.2°。以光纤捷联航姿托架后安装孔为圆心,调节航姿托架前部两个腰型孔,实现航向调节。
4 机载试验
4.1 组合导航功能及模式切换
检查光纤航姿组合导航功能及模式切换,试验步骤:将飞机管理计算机、光纤航姿上电;使用数据链仿真程序指令区发送遥控开关码光纤航姿对准指令,光纤航姿对准后,检查光纤航姿与内嵌的GPS组合;断开航姿与GPS天线的连接,检查光纤航姿与飞机管理计算机转发GPS组合。确认光纤航姿与内嵌GPS和飞机管理计算机转发的信息组合导航功能及模式切换正确,进行下一步试验。
4.2 光纤航姿信号极性检查
检查光纤航姿各传感器信号以及姿态的极性。试验可通过将光纤航姿从安装托架上拆下后(保持电缆连接)手动晃动。若飞机不能收到卫星信号,则需将飞机推出机库外进行。试验步骤:飞机管理计算机、光纤航姿上电;确认光纤航姿标示航向与无人机顺航向一致;发对准指令使光纤航姿对准;光纤航姿对准后,依据光纤航姿机箱上的航向标记,用手晃动光纤航姿,检查俯仰、横滚和航向极性:
俯仰方向将无人机抬头方向旋转,然后恢复初始位置(俯仰角极性为正,轴向过载先为正后为负,俯仰速率在俯仰角增大时为正,减小时为负);
滚转方向将无人机向右滚转方向旋转,然后恢复初始位置(滚转角极性为正,侧向过载先为负后为正,滚转速率在滚转角增大时为正,减小时为负);
偏航方向将无人机向右偏航方向旋转,然后恢复初始位置(偏航角极性为正,法向过载一直为正,偏航速率在偏航角增大时为正,减小时为负)。
确认光纤航姿信号极性符合要求后,进行下一步试验。
4.3 差分功能测试
检查光纤航姿内嵌的GPS板的差分功能是否满足工作要求,飞机与起降引导差分站之间满足通视要求。试验步骤:飞机管理计算机、光纤航姿上电;起降引导差分站上电并工作正常;检查GPS板定位状态是否为RTK状态;关闭差分引导站5分钟左右再开启,检查GPS板的定位状态切换是否满足要求。
确认光纤航姿内嵌的GPS板能正确建立差分及定位状态切换满足要求,试验结束。
5结束语
国外的光纤航姿及其应用技术发展很快,光纤航姿的研究已经取得重大成果,低、中等级精度的光纤捷联已经产品化,在军用和民用领域得到广泛应用,高精度的光纤航姿的研究开发也已经取得突破性进展,国外无人机采用高精度光纤捷联作为辅助,作战和侦察能力效果提升显著,外贸无人机技术状态更为复杂,各系统变化较大。对无人机修理能力和素质提出了更高的要求。为此,作者在文中借助对光纤捷联航姿系统原理、试验的研究,提出了针对外贸型无人机的修理能力的建设,为无人机的修理带来促进作用。
参考文献:
[1]王巍:《基于数字化测量的飞机架型装配技术研究》,航空制造技术2014年21期。
[2]杨建潮,尹京:《测量误差与测量不确定度关系浅析》,工业计量,2002年版。
[3]孙德芬,耿维明.测量误差及其分类,上海计量测试,2002年版。
作者简介:
赵剑,工程师,从事航空装备修理。
(石家庄海山实业发展总公司,河北 石家庄 050208)
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
中学生数理化·高一版(2017年3期)2017-07-08
科技资讯(2016年25期)2016-12-27
企业技术开发·下旬刊(2016年9期)2016-11-23
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
WTO经济导刊(2014年6期)2016-03-22
数理化学习·初中版(2009年1期)2009-03-19
