
基于视觉与触觉双信息的上肢康复训练机器人运维系统设计
2020-06-03 00:24付胜男
机械设计与制造工程 2020年4期
付胜男
(北京中医医院顺义医院信息建设部,北京 101300)
目前手部功能障碍已成为医学康复界的热点研究方向,对上肢功能障碍进行康复训练是十分重要和关键的医疗手段,及早进行康复训练可以大大降低残疾的可能性[1]。随着科学技术和医疗技术的发展,上肢康复训练机器人是替代医师牵引患者患肢进行康复治疗,完成训练动作的一种医疗设备,不同于一般的工业机器人,它有着特殊的工作对象以及特定的工作环境。传统数据手套结构复杂,导致其灵活度和实用性大大降低[2],因此相关专家设计了一种可穿戴式装置用于实现数据的处理。该装置穿戴方便,可根据机器人手臂测试抓握力和弯曲度。可穿戴式装置采用压阻式传感器检测手指的活动数据,并能有效评估手部在日常生活中的运动能力,但是该装置用于评估手部功能的信息量太大,处理比较困难[3-5]。由此可知,设计一种上肢康复训练机器人运维系统已迫在眉睫。
1 上肢康复训练机器人运维系统
1.1 系统硬件设计
本文设计的上肢康复训练机器人运维系统是上肢训练虚拟现实(VR)系统,主要通过视觉、听觉、触觉等感觉通道的真实模仿和互动形成,用于实现上肢康复训练。
系统硬件由视觉模块、触觉模块和三维触觉操作器构成。本文利用三维触觉操作器Phantom操控虚拟手臂,并根据虚拟环境情况,实现力觉、视觉和听觉等多感觉的真实互动[6]。
1.1.1视觉模块
在码本模型中,利用Camshift算法,实现对不同颜色物体的跟踪,过程如下:
1)读入视频图像,消除背景颜色干扰,通过码本模型在矩形窗口上的范围获取前景运动目标;
2)通过Camshift算法追踪前景范围中的目标;
3)根据矩形窗口的方位以及运动评测预估和尺码,得到下一帧目标追踪的搜索窗口[7];
4)根据得到的搜索窗口,对目标位置进行跟踪预测,获取目标尺寸。
1.1.2触觉模块
计算机通过加权集成算法,完成对触觉压力数据的操作[8]。为了得到模型压力阈值,采用Camshift获取模型跟踪矩形框的长度和宽度,以实现对手部抓握能力的分析。视觉和触觉集成系统结构如图1所示。
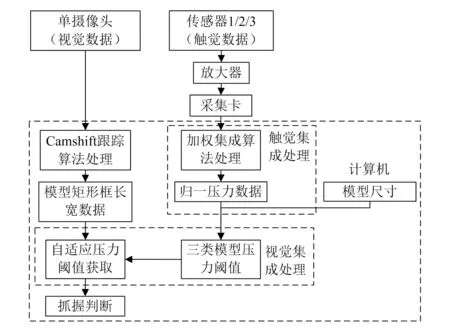
图1 视觉和触觉集成系统结构
1.1.3三维触觉操作器
三维触觉操作器由基座、连杆机构和手柄构成,利用空间映射算法,将电脑发送的操控信号传输到虚拟环境中的代理点[9]。
由于输出力反馈变化较快,因此力反馈计算速度也很快。当模拟输出力达到预期效果时,利用三维触觉操作器Phantom Premium 1.5,将其提高至1 000 N。同时力信息需要使用者和虚拟环境交换真实感受,使患者所握的手柄能够得到力反馈[10]。
1.2 系统软件设计
1.2.1基于ARAT的抓握测试
ARAT(action research arm test)为手臂动作调查测试,测试内容为抓、握、捏、粗大运动,用来分辨抓握者的抓握类别和抓握程度。抓握者依次抓不同边长的正方体、长方体,以及不同直径的球体和圆柱体,并记录测试时间和路径等数据。
1.2.2训练模式
上肢康复机器人的训练模式,由双侧训练模式和脑电训练模式构成。康复早期阶段采用脑电训练模式,有助于治疗患者肌力受损部位,康复中后期,采用双侧训练模式,以进一步修复患者的肌力。
脑电训练模式主要是操作外骨骼机械臂,在虚拟现实情况下,通过编程信息实时定位Phantom和MTx传感器的位置,对比大小后,通过51单片机发出信号,并输出高低不同的电频,同时操控数字电机Maxon的正反转。该训练模式通过三维触觉操作器Phantom控制患者的上肢运动,其中外骨骼机械臂由患者上肢带动,其运动路径由Phantom主端系统控制。该系统由医生操控,患者需要做镜像运动,从而提高自身的运动主动性[11]。第一种双侧训练子模式如图2所示。
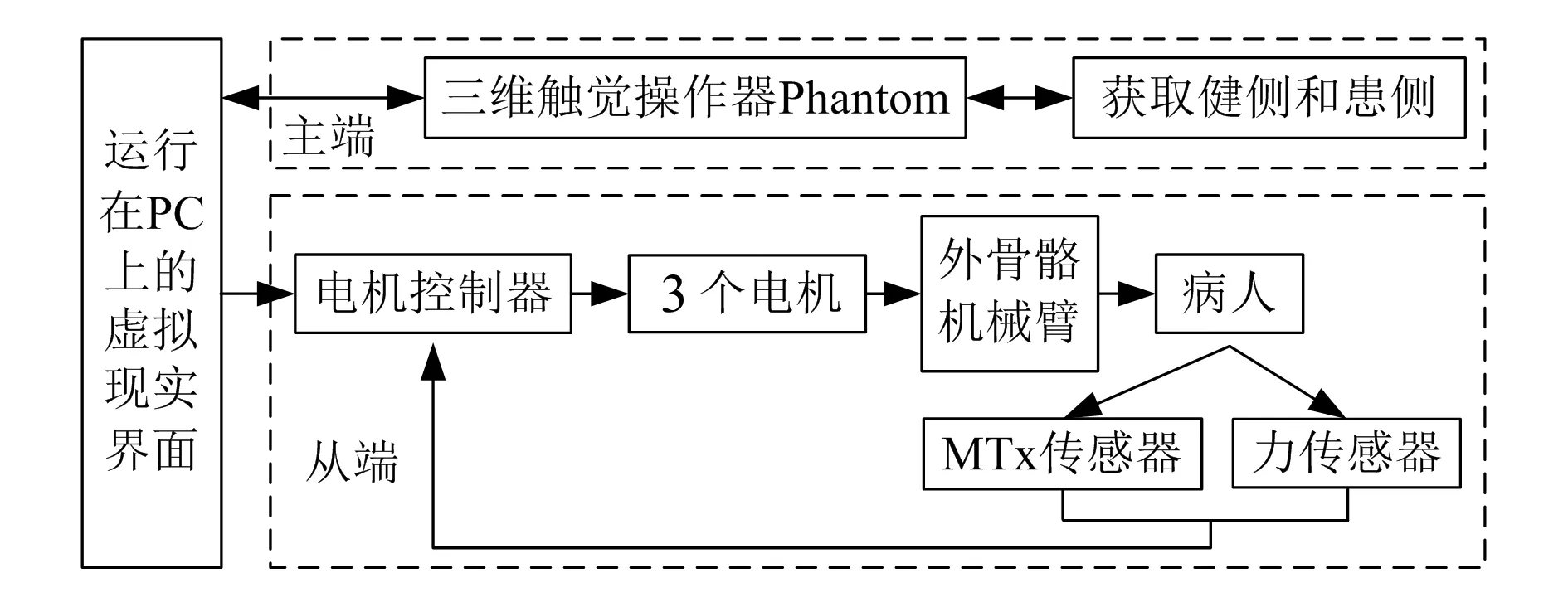
图2 第一种双侧训练子模式
双侧训练模式通过构建Phantom的力势场,得到患者上肢运动方位,并操控患者主端来实现对外骨骼机械臂的控制,以此提升患者上肢的运动康复效果,确保患者完成双侧镜像运动[12]。第二种双侧训练子模式如图3所示。

图3 第二种双侧训练子模式
1.2.3图像配准方法
1)对应空间点列的奇异值分解匹配方法。
系统依据物理接触式成像原理实现触觉传感,配准图像的目标是消除变换过程中的不利干扰,保证图像处于同一世界坐标系中[13]。将触觉传感器运动方向、触觉阵列平行方向以及触摸扫描平面正法方向,分别设置成世界坐标系的x轴、y轴和z轴的正方向。M和P分别表示旋转比例居中和平移矩阵,两种矩阵的形式分别是3×3和3×1,利用最佳的M和P,确保矩阵目标函数值最低:
(1)
式中:f(M,P)为矩阵目标函数;t为空间点的列数量;bt为仿射变换;ct为目标变换;S为空间点列总数。
Db=M·Dc+P
(2)

(3)
2)非对应空间点列的ICP算法。
系统采用ICP(iterative cloest point)方法处理图像轮廓特征点,具体过程如下:
①对B对应于Cj(j=0,1,…,C0=C)的各点最近距离点进行运算,获取平面点列(B,Cj)。
②通过ICP算法得到与(B,Cj)相对应的最佳配准参数(Mj,Pj)。
③用R*替换集合C,替换过程利用最佳配准参数R完成;如果R*和B的平均差小于阈值,则完成迭代运算过程,否则,设置j=j+1,执行过程①,直至完成迭代运算过程。
如果得到最佳配准参数(Mj,Pj),则几何变换输入图像,确保其与参考图像处于相同坐标系统中,从而实现视觉图像的配准[15]。
2 实验分析
2.1 配准效果分析
为了验证本文系统的配准效果,采用分辨率为25×25的阵列式触觉传感器,触碰同一个普通的碳素笔,对比分析本文系统、ARM(advanced RISC machines)运维系统以及基于奇异值分解方法-ICP方向加速的运维系统的配准效果。配准结果对比见表1。
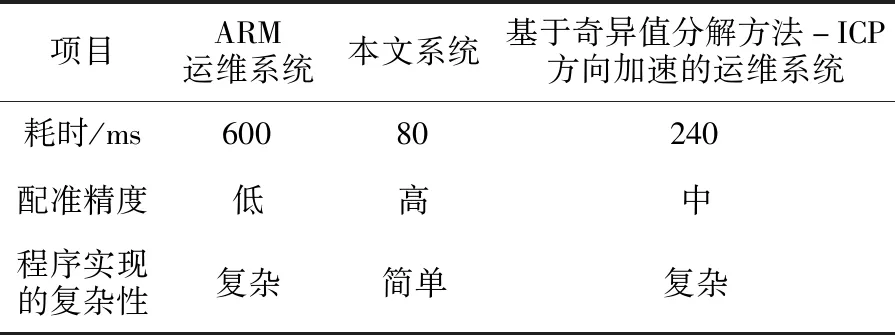
表1 配准结果对比
分析表1可得,相对于其他两种系统,本文系统的配准耗时少、配准精度高,且程序实现的复杂性低,说明利用本文系统进行上肢康复训练时的配准效果最好。
2.2 抓握效果分析
实验对象为某医院随机选取的15例偏瘫患者,这些患者包括10名中年人和5名老年人,男性和女性的人数分别是9人和6人。实验得分记录如图4所示。
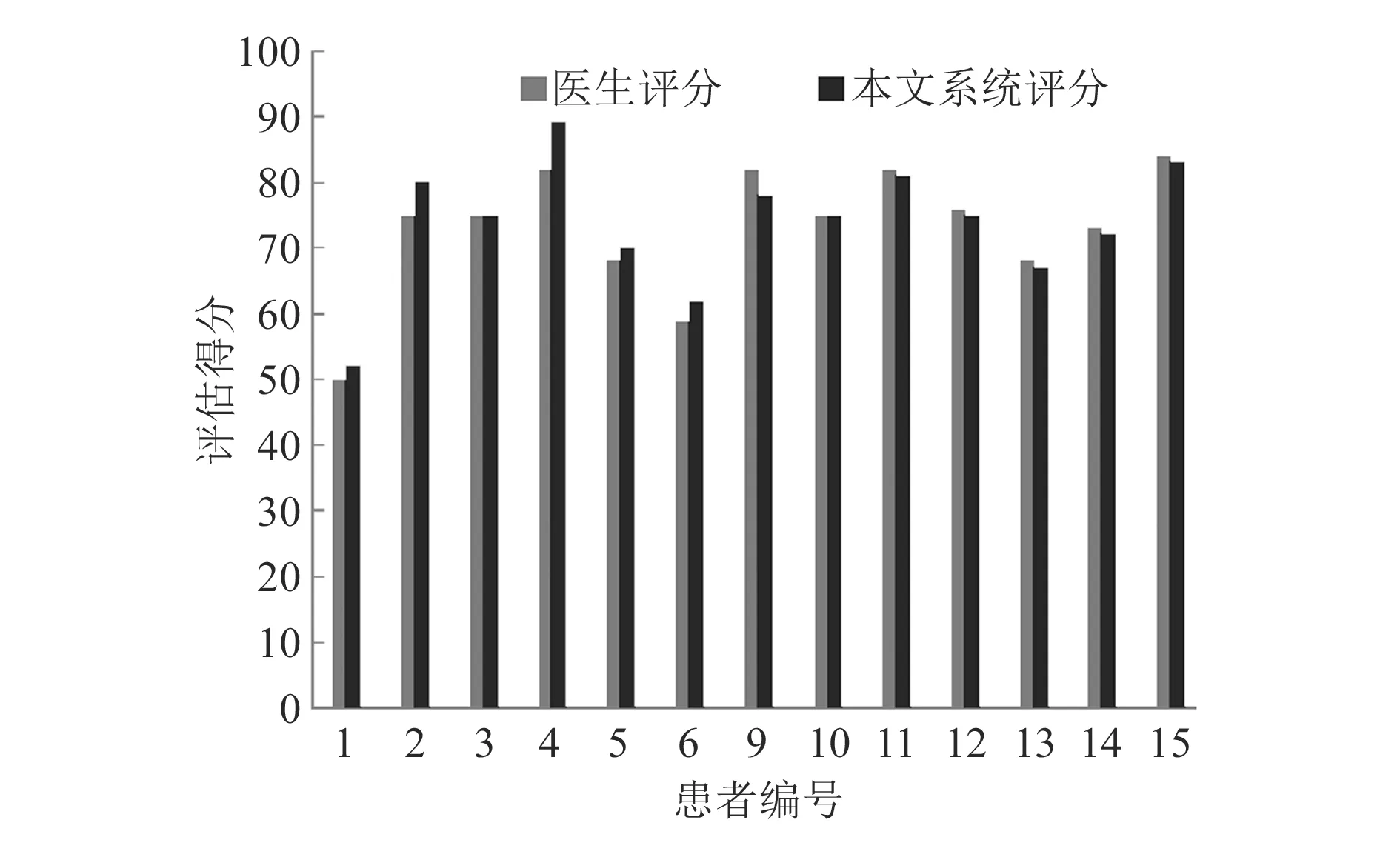
图4 患者得分对比图
从图中可以看出,本文系统评分和医生评分基本一致,说明采用本文系统分析患者手臂抓握效果的评分能够达到预期目标。
2.3 跟踪控制效果分析
利用本文系统对上肢康复训练机器人跟踪控制效果进行验证:设置上肢康复训练机器人肘关节运动区间为[-40°,60°],应用本文系统实现肘关节运动,从而获得三维触觉操作器的位置。实验过程中用文本文件记录三维触觉操作器的f(M,P)位置和MTx传感器姿态等信息,然后将文本文件导入MATLAB,实现对本文系统跟踪效果的测试。实验给出的阶跃方式下本文系统的跟踪效果如图5所示。

图5 阶跃方式下的跟踪控制实验
分析图5可知,当患者操作机械臂的运动形态为阶跃响应时,三维触觉操作器在大约1.9 s时能够实现肘关节运动角度的跟踪,此时本文系统出现轻微的超调,但未产生安全问题,说明本文系统的运行稳定、超调量低,可以有效跟踪肘关节运动角度。
3 结束语
本文设计的基于视觉与触觉双信息的上肢康复训练机器人运维系统,能够有效控制和训练患者上肢运动,精确跟踪患者上肢运动情况,提高患者上肢康复效果。在上肢康复训练过程中,通过双侧训练模式和脑电训练模式,提高了患者的康复训练意识和积极性;采用对应空间点列的奇异值分解方法和非对应空间点列的ICP算法,实现了视觉与触觉双信息的配准,提高了反馈效果。
猜你喜欢
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
中国交通信息化(2019年5期)2019-08-30
能源(2018年8期)2018-09-21
特别健康(2018年3期)2018-07-04
中国自行车(2018年4期)2018-05-26
能源(2017年11期)2017-12-13
北方音乐(2017年4期)2017-05-04
制造业自动化(2017年2期)2017-03-20
山东工业技术(2016年15期)2016-12-01
