
基于Unity 3D平台的变电站可视化巡检自主定位方法
2020-06-03 00:24李仙琪张俊伟陈祖慰
机械设计与制造工程 2020年4期
李仙琪,张俊伟,陈祖慰
(贵州电网有限责任公司培训与评价中心实训设备管理部,贵州 贵阳 551417)
电力是国民生活、生产以及社会发展不可缺少的资源,变电站在电力平台中主要负责电力的输送和分配[1],因此变电站的正常运行尤为重要。由于社会对电力需求的不断提高,对变电站的电力输送要求也越来越高,为了保证变电站的稳定运行,需要定期巡检变电站的设备[2]。巡检项目通常为检测设备温度是否正常、变压器是否存在异常,查看设备表是否存在故障等[3],目前通常采用人工方式对变电站进行巡检。由于变电站内部设备复杂且数量大、人工巡检效率不高,因此耗费了大量的时间。当设备出现故障时仅靠人工巡检很难在第一时间排除故障,基于此本文提出基于Unity 3D平台的变电站可视化巡检自主定位方法,以Unity 3D平台为依托收集变电站的实时状态数据,并根据该数据绘制变电站的三维图像在计算机中实现可视化表达。近年来,变电站多使用机器人巡检变电站[4],实现变电站巡检的智能化与可视化,本文所述方法就是通过Unity 3D平台支持机器人的巡检,使得机器人能够判断自身在变电站中所处的位置,并根据自身位置规划到达目标位置的最佳路线。
1 多模块Unity 3D平台及其结构设计流程
因传统的变电站巡检平台功能单一,无法实现组合设备的多种功能,为充分发挥变电站多种巡检设备的功能,笔者设计了一种多模块的Unity 3D平台。通过Unity 3D平台开发的机器人虚拟操作平台,即可实现变电站巡检机器人自主定位。Unity 3D平台的操作步骤为:用户在Unity 3D软件中执行输入/输出操作[5],在用户界面选择需要的模块,相继展开下一步操作。选择数据模块、业务逻辑模块、表示模块作为多模块Unity 3D平台中的主要功能模块,能高效实现变电站可视化巡检自主定位。
数据模块负责收集机器人在变电站内巡检得到的相关数据(包括实时数据和历史数据),收集手段通常为网络输送和文件获取[6]。数据模块将收集到的巡检数据传送给业务逻辑模块后,业务逻辑模块据此绘制三维可视化效果图[7],并将该效果图传送给表示模块,表示模块将变电站巡检的三维可视化效果图通过计算机实现可视化显示。
为顺利实现变电站巡检,需要精准控制巡检机器人的轨迹与行踪。因此开发机器人Unity 3D操作平台控制机器人时需要更高的精确度,图1为Unity 3D平台的开发流程图。
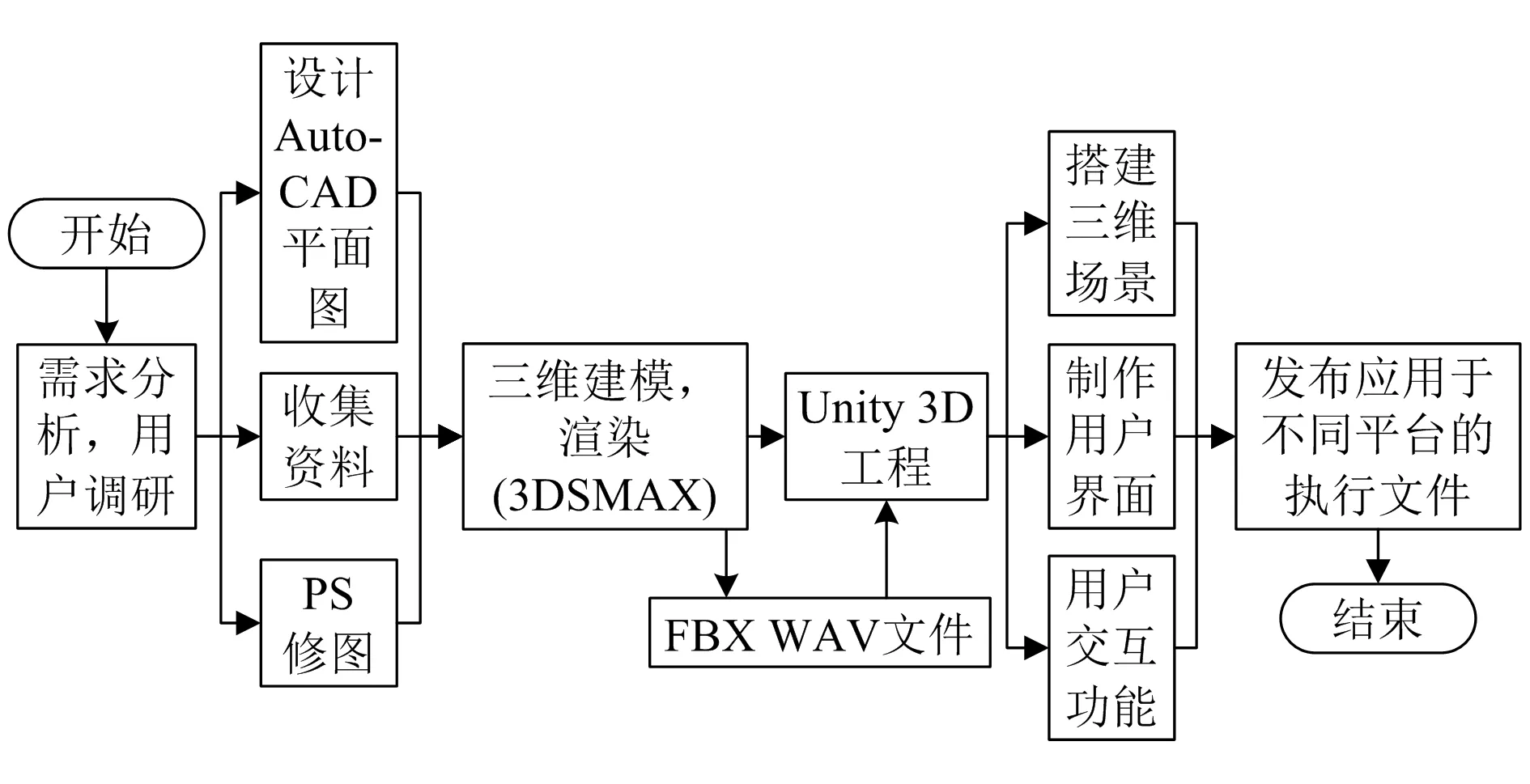
图1 Unity 3D平台开发流程图
从图1可以看出,需求分析、用户调研、平面图设计、资料收集等前期部署,属于平台结构设计的第一阶段;通过Unity 3D工程搭建三维场景、制作用户界面,通过建立交流功能、启用聊天功能、增加自主服务功能的方式实现用户交互功能,属于平台结构设计的第二阶段[8]。
该平台在开发过程中,参考第一阶段收集的数据构建变电站巡检内容的三维模型,并将该模型保存为FBX WAV格式[9],然后将保存的模型导入Unity 3D工程中,搭建三维变电站场景(包括光照、场景渲染等)、制作用户界面(包括主页工具栏、菜单等)、设计用户交互功能(包括Android端、IOS端等)。
2 Unity 3D平台中建立三维机器人模型
构建机器人巡检三维模型是建立变电站可视化巡检平台的重要组成部分。为精准表达变电站中机器人的位姿信息,需要在虚拟机器人中构建精准的装配模型;为保证机器人虚拟模型的逼真度,需要设计机器人虚拟模型的光照和纹理,并将处理完成的模型保存为可被Unity 3D平台接受的格式。SolidWorks平台是一种专业的CAD软件,但在模型的光照和色彩渲染方面效果不理想,且光照和色彩渲染数据无法录入到Unity 3D平台中;Unity 3D平台虽然不是专业的CAD软件,但是,在动画制作的光照和色彩渲染方面表现出色,且输出格式多样[10],因此本文将二者相结合作为机器人建模的平台。
变电站可视化巡检平台中机器人建模步骤如下:
1)机器人建模过程中,为方便控制机器人巡检过程中执行的操作,使机器人可以根据口令运动,需要依据机器人关节的数量构建精准的机器人局部模型。完成局部精准建模后,将多个模型组合在一起形成完整的机器人模型[11],以3DS格式存储在SolidWorks平台中并导出。
2)为步骤1)中建模完成的机器人模型添加光照和色彩渲染,增强模型真实感。在3DS MAX软件中完成渲染,并完成模型贴图、添加材质属性等操作[12],以此提高模型的逼真度,最后通过调节机器人所有部件的坐标轴,使机器人得到口令后能够被完全控制。
3)将步骤2)中渲染完成的三维机器人模型保存为FBX WAV格式,并将模型导入到Unity 3D平台中,在该平台中添加机器人模型相应部件的材质[13]。
机器人巡检模型包含检测模块、数据模块、定位模块、驱动模块、充电模块。定位模块和检测模块中的可见光相机和红外相机通过以太网与后台主机连接。定位模块含有惯导组件,驱动模块含有驱动控制器,通过TB-418串口连接惯导组件和驱动控制器。驱动控制器保证机器人轮毂电机能够正常工作,且保证轮毂电机能够接收到霍尔传感器传递的信息,驱动控制器需要通过对应的TB-418串口实现与电机控制器的信息交互。机器人模型中共包含4个驱动控制器和4个电机控制器,因此有4个对应的TB-418串口。驱动模块包含4个步进电机以及4路绝对编码器,驱动控制器通过CAN总线控制4个步进电机,并通过6XV1840-2AH10通讯总线接收4路绝对编码器发送的信息。数据模块中的主机通过无线网与后台主机相连接。驱动装置的电源为40 V铁锂电池,机器人内部的步进电机、轮毂电机、电机控制器、可见光相机、红外相机的电源为28 V铁锂电池,定位模块的3D激光雷达和主机PC的电源为16 V铁锂电池,定位模块的惯导组件和驱动模块的驱动控制器的电源为8 V铁锂电池。
3 巡检机器人定位与路径规划
3.1 巡检机器人定位
为了获得更加准确的巡检机器人定位结果,采用SLAM(simultaneous localization and mapping, 同步定位与建图)算法构建定位地图。SLAM算法因其重要的理论与应用价值被很多学者认为是真正实现全自主移动机器人的关键,因此本文采用SLAM算法实现变电站机器人巡检定位。SLAM在变电站中的巡检过程如下:机器人通过自身携带的传感器等设备获取位姿、测量环境等相关信息,对采集的变电站设备巡检信息进行分析,实现变电站巡检地图的构建,辅助巡检机器人自主定位[14],最终达到巡检的目的。通过SLAM技术对机器人位姿信息和地图信息进行评估、计算,可使信息接近于真实状况。在t时刻,变电站巡检机器人的位姿可以用Wt={W1,W2,…,Wt}描述。Wt为相对于上一运动位置的坐标,设机器人在某环境中运动,且在该环境中不用考虑高度问题,机器人位置(x,y)和机器人的角度α构成了机器人的位姿Wt。假设该环境中有N个固定的路标点,这些路标点用αj(j=1,2,…,N)表示,路标点集合用α′表示,α′={α1,α2,…,αN}。机器人的控制信息与前一刻位姿的概率函数即为机器人位姿需遵循的概率法则。
想要获取机器人在固定时间Δt内的位置信息,需要描述机器人的位姿模型。巡检机器人t时刻的位姿向量Wt如式(1)所示:
Wt=Wt-1+ΔW+θt
(1)
式中:Wt-1为(t-1)时刻的位姿向量;ΔW为两个位姿向量的变化量;θt为干扰噪声。机器人在t时刻的位置可表示为(xt,yt),要想获取机器人位置和角度变化量,需要通过编码器实现。
在完成巡检机器人位姿的计算后,就可以构建巡检机器人的运动模型。为获取机器人在规定时间Δt内的运动信息,需要对机器人的运动模型作如下定义:

(2)
机器人在规定时间Δt内横向和纵向的位移增量可用Δx和Δy表示,该位移增量可以看成是时间Δt内速度v在横向和纵向坐标轴上的反映。速度v和角度变化量Δα需要通过编码器获得,该编码器安装在机器人左右车轮中。
根据已经建立的运动模型与获得的机器人位姿,可得巡检机器人的定位公式为:
(3)
式中:λ为机器人基于原始位置的位移变化;L为机器人运动路径长度;MN为N个路标的测量点的坐标;vt为t时刻机器人的运动速度;d为机器人自身长度。
巡检机器人定位更新方程为:
(4)

以机器人巡检定位方程为基础构建地图的计算函数为:
(5)
式中:δt为相对原位置的移动距离。
机器人以定位为基础,准确执行Unity 3D口令,且定位与地图构建也是相互作用的关系,定位是地图构建的条件,地图构建是定位的依据,因此要实现机器人定位和地图构建,两者必须同步进行。同步进行机器人定位和地图构建的方法有多种,较为常用的方法为航迹推算和组合定位[15]。航迹推算通过机器人运行轨迹和车轮转速计算机器人位置,但该方法获取的结果准确率不高;组合定位仅融合传感器等设备获取的数据即可实现机器人定位,因而本文设计的巡检机器人采用组合定位方法同时实现变电站目标定位和地图构建。
3.2 路径规划
为保证机器人在巡检过程中能够避开路障、行程最短并准确到达目的地,需要对路径进行规划,在路径规划中要明确规划后的路径所能解决的问题:首先该路径必须可以使机器人准确到达目的地,然后保证路径为最短路径,最后要保证机器人在路径遇到障碍物时可自主躲避障碍物。本文采用栅格法将机器人所处的变电站环境分割成均匀的栅格,并且栅格有自由、占用两种状态,栅格的大小由机器人的运动步长决定,栅格越大对障碍物信息的处理就越粗糙。栅格法的建模优势在于可以根据变电站的环境自由分割栅格。根据3.1节中的机器人定位与地图计算结果,建立栅格坐标表达式为:
(6)
式中:xt和yt分别为相对于栅格的中心横、纵坐标;m为栅格的标号;u为地图中栅格列数;mod(m,u)为m,u的求余函数。在栅格地图中,机器人的前进方向为以机器人为原点,以45°的整数倍为转向角度。
在完成栅格建模后,通过机器人配置的传感器检测变电站的环境信息,并将障碍物所处的栅格进行标注。简化栅格地图中机器人的表示,使得在栅格地图中可以形成一条机器人可以运动的路径。机器人运动路径K可以由一系列的栅格集合表示:
K={k,s1,s2,…,sn,r}
(7)
式中:k,r分别为机器人运动路径的起点与终点栅格;sn为机器人运动路径经过的栅格,其中n为栅格数量。
根据式(7),可得机器人运动路径长度Qt为:
(8)
根据获得的机器人运动路径长度,建立机器人运动防碰撞数学约束条件方程:
(9)
式中:F(Qt)为碰撞约束条件,表示路径与机器人发生碰撞的概率;minQ为最短路径。
4 实验分析
4.1 本文定位方法定位精度测试
为验证本文所提出的基于Unity 3D平台的变电站可视化巡检自主定位方法的应用价值,需要测试本文定位方法的精度。以某市变电站为研究区域,将机器人放置在该研究区域内,采用本文定位方法使机器人定位精度达到厘米级,通过以下实验验证本文定位方法的定位精度和稳定性。
机器人在变电站的12个点位处采集静态定位数据,设置采集频率为8 Hz,巡检时机器人在每个测试点停留1.5~2.5 min,采集的数据均在机器人的数据模块显示。测试结束后,采用Excel和MATLAB软件处理采集到的静态定位数据。机器人在巡检中除了采集环境数据外,还可获取地心坐标系下的经纬度信息,并将该信息转化为该坐标系下的直角坐标值,然后提取测得的180个数据点的横、纵坐标数值,分别求得横坐标的均值和标准差以及纵坐标的均值和标准差,用公式可表示为:
(10)

根据式(10)的求解方式获取12个点位处数据的均值和标准差,以10号位置的数据均值和标准差结果为例,表1为10号位置的横、纵坐标数据处理结果,图2为测量点10号位置的横、纵坐标方向数据曲线图,图3为机器人在测量点位10号位置定位数据分布图。

表1 10号位置的横、纵坐标数据处理结果

图2 测量点10号位置的横、纵坐标方向数据曲线图
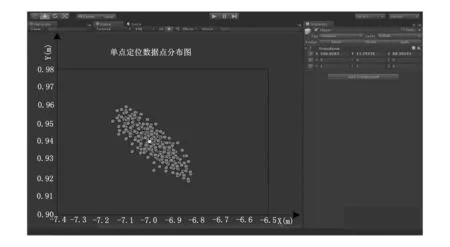
图3 机器人在测量点位10号位置定位数据分布图
结合图2和表1可知,机器人在巡检过程中获取的12组数据中,横轴数据标准偏差最大值SXmax=0.005,纵轴数据标准偏差最大值SYmax=0.005。从图2中曲线的波动状况可以看出,机器人采集的定位数据上下波动不超过1.8 cm,在一定程度上可以认为单点定位数据较为稳定。图3中标示出的点为用本文定位方法定位的结果,由该数据点的分布状态可了解到,采用本文定位方法实现的自主定位精度很高,可维持在厘米级范围内。
将变电站内地面水泥板间的缝隙作为标定点,标出10个点位,如图4所示。

图4 实际点位标定图
图4中,机器人在巡检过程中经过这10个点位时,采集10个点位的坐标数据,并通过该坐标数据得到点位之间的直线距离,同时采用人工测量的方法同样测量每两个点位间的实际距离,对比机器人测得的点位间距离和人工测得的点位间距离,结果见表2。
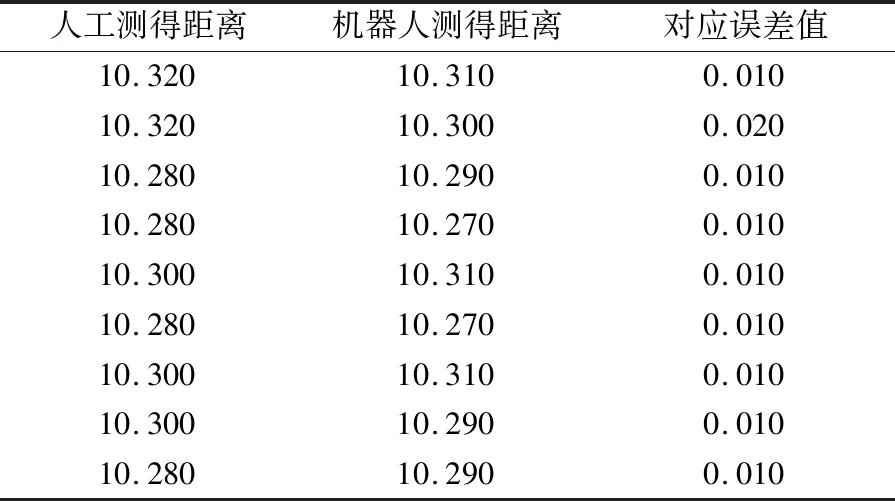
表2 机器人测得点位间的距离误差值 m
由表2可知,机器人测得的点位间距离与人工测得的点位间距离间的误差很小,误差基本保持在0.010 m,定位精准度高。
4.2 动态定位测试
本节在变电站巡检机器人的单点定位精度和测量精度已验证的基础上验证机器人在动态状况下的测量稳定性。在变电站内设定一个环形区域作为机器人运动实验区,该环形区域呈闭合状态。机器人沿着该环形区域运行的过程中,同时对定位数据进行采集,并将该定位数据不断发送给Unity 3D平台,保证定位的精度保持在厘米级别。机器人自身也会保存一份定位数据,并将定位数据转换为可以绘制成图的坐标系数据,通过MATLAB软件绘制成封闭的路线图,如图5所示。
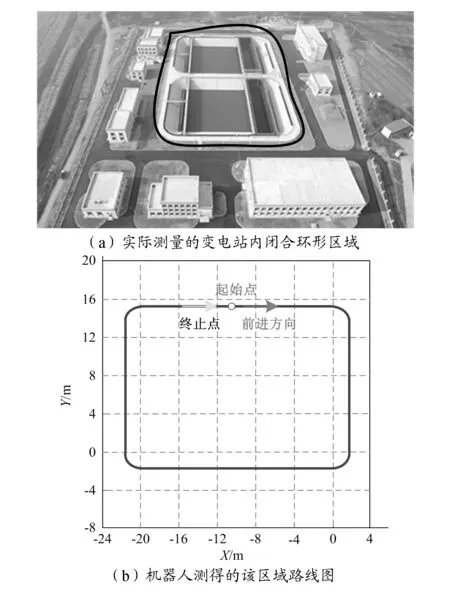
图5 变电站内闭合环形区域动态测试图
图5(a)中实线部分为人工实际测量的变电站内闭合环形区域,机器人测得的区域路线图与人工测量的变电站内闭合环形区域一致,因此当机器人沿着闭合环形区域运动时,可测得一条与实际路径完全一致的路线,且定位精度不会受到自身运行的影响,由此可知,采用本文定位方法的巡检机器人在动态状况下所测量的定位数据具有很好的稳定性。
4.3 路径规划效果分析
用实验验证本文定位方法在变电站内能否有效规划出巡检的最优路径,具体路径如图6所示。
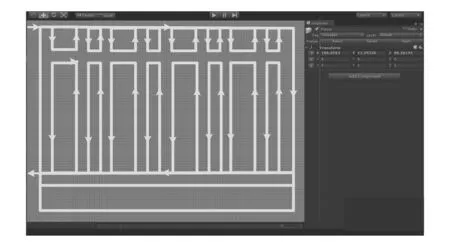
图6 路径规划图
图6显示,用本文定位方法规划的变电站巡检路线整齐、规范,在确保躲避障碍物的情况下能准确到达目的地,获得最优的路径规划结果。
5 结束语
近年来,采用机器人替代人工巡检的操作越来越多地被应用在变电站巡检工作中,不仅缩短了巡检时间,且能在短时间内定位设备故障。采用本文定位方法设计的Unity 3D平台在操控机器人巡检的过程中,向机器人下达巡检命令后,会提前规划机器人巡检的最优路径,使机器人能够避开路径中存在的障碍物,缩短机器人的巡检时间。本文定位方法不仅可以精准定位巡检点,同时还能自动规划最优路径。但是由于实验考虑的影响因素尚不全面,未来还有进一步开发的空间,更加完善的自动巡检系统在未来变电站可视化巡检中将具有广阔的应用前景。
猜你喜欢
光学精密工程(2022年22期)2022-11-28
科技创新与应用(2021年31期)2021-11-09
中北大学学报(自然科学版)(2020年4期)2020-07-13
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子制作(2019年10期)2019-06-17
电子技术与软件工程(2019年6期)2019-04-26
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
弹箭与制导学报(2015年1期)2015-03-11
雷达学报(2014年4期)2014-04-23
