剪叉式高空作业平台双油缸同步性研究
2020-06-08 17:18胡仕成卢银玲黎新齐肖叶萌
中国电气工程学报 2020年1期
胡仕成 卢银玲 黎新齐 肖叶萌


摘要:为减少双油缸不同步对剪叉式高空作业平台稳定性及安全性的影响,探究了影响双油缸同步性能的因素,并对液压控制系统进行改进。目前,大多数企业采用机械连接同步回路的方法,利用剪叉机构自身结构上的优势,在运动时迫使两液压油缸达到同步运动的效果,这种情况下双油缸的同步精度不高。本文对液压系统进行了改进,采用主从式电液比例闭环控制的方法,建立了剪叉式高空作业平台液压系统的AMESim仿真模型,仿真结果表明同步误差降低到6%左右。为进一步提高控制精度,结合经典PID控制进行系统校正和同步控制,仿真结果显示双油缸的同步误差有效控制在1.2%以内。
关鍵词:双油缸同步;电液比例闭环控制;AMESim;经典PID控制
Abstract: In order to reduce the influence of the non-synchronization of dual hydraulic cylinders on the stability and safety of the scissor aerial work platform, the factors affecting the synchronization were analyzed, and the hydraulic control system was improved. At present, most companies use the method of connecting the synchronous circuit mechanically, which forces the two hydraulic cylinders to move synchronously by using the advantage of scissor mechanism in structure. However, the synchronization precision of dual hydraulic cylinders is not good in this case. In this paper, the hydraulic system was improved by adopting the method of master-slave electro-hydraulic proportional closed-loop control, and the AMESim simulation model of the hydraulic system of the scissors aerial work platform was established. The simulation result indicates that the synchronization error of the dual hydraulic cylinders reaches about 6%. In order to further improve the control precision, the classical PID control was used for system calibration and synchronization control, and it shows that the synchronization error is within 1.2%.
Key words: Synchronization of dual hydraulic cylinders; Electro-hydraulic proportional closed-loop control; AMESim; Classical PID control
0 前言
剪叉式高空作业平台属于高空作业平台的一种,具有场地适应性强、操作灵活、承载能力强等优点,适用于室内外及不平整工况,可实现多人同时工作,具有较高的稳定性,广泛应用于建筑维修、电气维修、市政园林施工、机场码头运输、广告装潢等领域[1]。10m及10m以上的高空作业产品的需求量不断增加,很多企业开始采用上下平行布置的双液压油缸进行驱动控制[2]。当引入双油缸驱动时,剪叉式高空作业平台的运动特性也变得更加复杂。剪叉式高空作业平台的机构自由度为一,采用双油缸驱动时,各油缸所受载荷虽有减少,但是机构运动的自由度数小于驱动器的数目,这种情况下会造成“驱动冗余”,导致运动状态不稳定。目前市场上的大多数企业采用机械连接同步回路的方法,并且液压系统多数采用开环控制,作业平台在启动和停止时刻会出现冲击现象,系统自身不能调节干扰的影响,导致整体同步控制精度不高,影响了其作业效果[3]。因此,对剪叉式高空作业平台双油缸的同步控制研究具有十分重要的工程实践意义。
1 剪叉式高空作业平台双油缸同步控制系统研究
开环控制的同步系统性能完全依靠液压元件如节流阀、同步阀、调速阀等元件本身的精度控制,所以不能抑制或者消除误差,适合应用在同步精度要求较低的场合。闭环同步控制系统在开环控制的基础上加入反馈系统,根据输出量不断调节控制阀的精度不断缩小误差,从而完成同步控制[4]。为更好的提高液压系统的同步性,保障平台快速稳定的工作,对液压控制系统采用闭环控制的方式。通常采用的闭环同步控制方式分为两种:“同等方式”和“主从方式”[5]。“同等方式”是指所有执行元件同时跟踪既定的基准输出达到同步驱动的目的,但是此方法要求各控制元件、执行元件、检测元件、反馈元件等之间有较好的匹配效果,虽然同步精度高,但是控制方式的实现难度较大,给工程应用增加了难度。“主从方式”是指在需要完成同步的元件中选定一个输出为理想输出,其它执行元件跟踪这一理想输出并达到同步驱动的目的。综合控制效果和控制成本,本文采用主从闭环控制系统进行双油缸的同步控制,其控制原理图如图1所示。通过大量的文献资料查询并结合实际工况,最终选用电液比例闭环控制系统进行双油缸的同步控制,它不但控制精度较高,而且性能安全、造价低[6,7]。
2 剪叉式高空作业平台双油缸同步控制系统建模与仿真
AMESim是一款多学科领域复杂系统建模仿真平台软件,主要应用于仿真及动力学分析、液压系统和机械建模,能够为系统控制、热传动、流体动力提高较好的仿真环境[8]。本文利用AMESim软件搭建双油缸同步控制系统的仿真模型,各液压元件参数如表1所示,仿真模型如图2所示。液压系统采用的是“主从方式”的同步闭环控制,选定下起升油缸为主动液压缸,作为理想輸出,上起升油缸为从动液压缸,在工作过程中,位移传感器检测到从动液压缸的位移与主动液压缸位移之间的偏差时,用偏差信号控制电液比例方向阀,改变阀开口量,使得从动液压缸的输出与理想液压缸的输出相适应,进而实现双油缸运动同步的效果。仿真结果如图3所示。
仿真结果分析:下起升油缸从运动状态到稳定状态需要21.69s,上起升油缸从运动状态到稳定状态需要23.12s,上下油缸动态响应调整时间差为1.43s,双油缸的同步误差为6.19%。由仿真结果可知此液压系统是合理有效的,但是同步精度仍然不高。
3 经典PID优化建模仿真
为取得较高的同步控制效果,采用经典PID控制进行系统的校正。经典PID控制器是一种线性控制器,因其算法简单、可靠性高、鲁棒性好等优点被广泛应用于工业工程中[9],其控制原理如图4所示。在控制系统中,稳定性、准确性以及快速响应性三者之间往往互相制约,难以同时取得最优,因此需要求得PID参数的最优解。选用绝对误差作为PID的优化指标,绝对误差积分取得最小值时的PID参数即为系统最优解。
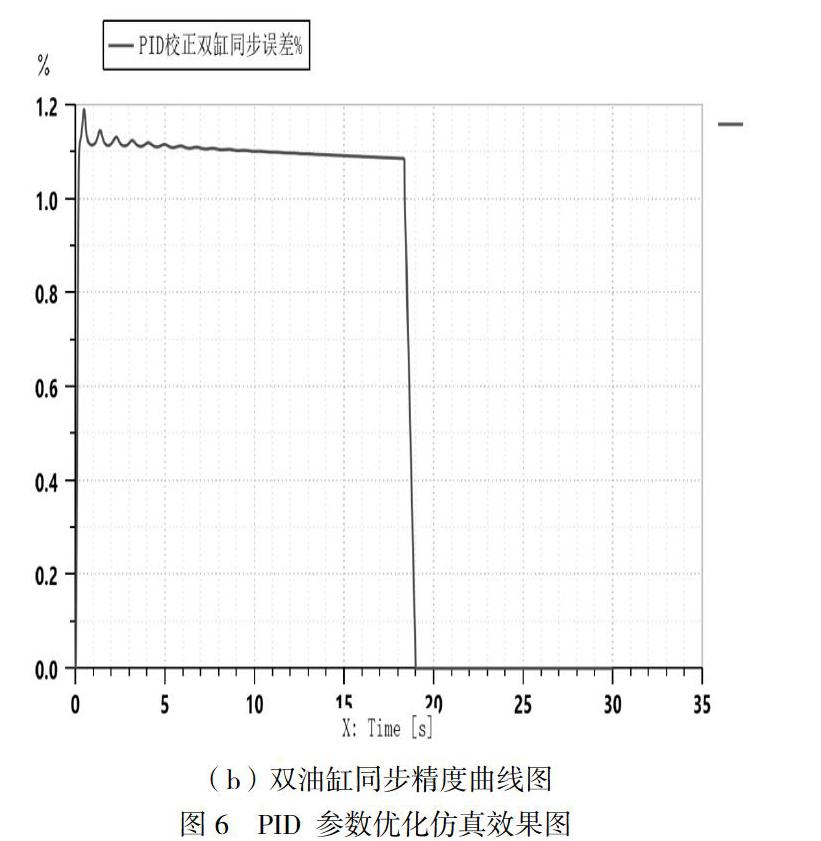
仿真结果分析:PID校正后下起升油缸从运动状态到稳定状态18.4s,上起升油缸从运动状态到稳定状态19.02s,上下油缸动态响应调整时间差为0.62s,双油缸的同步误差减小到1.19%。与未加入经典PID校正的系统相比,下起升油缸的调整时间缩短了3.29s,上起升油缸的调整时间缩短了4.1s,上下油缸动态响应调整时间差缩短了0.81s,双油缸的同步误差减小5%。仿真结果表明,加入经典PID控制在提高系统动态响应及双油缸同步性能方面效果显著。
4 结论
(1)对剪叉式高空作业平台的双液压缸同步效果而言,传统的采用机械连接同步回路与开环控制相结合的控制精度并不高且系统稳定性差,本文采用主从式电液比例闭环控制的方法有效的提高了剪叉式高空作业平台双液压缸的同步性能,使得系统响应比较平稳,同步误差控制在6%左右;
(2)与经典PID控制相结合,降低了外界干扰对系统稳态的破坏程度,并且能够更快速的做出响应,缩短上下油缸达到稳定状态的时间,将双液压缸的同步误差有效控制在1.2%以内,性能良好。
参考文献:
[1]SmiThings looking up for aerial work platformsth Anne. [J]. Diesel Progress North American Edition, 2005,71(1):12-14.
[2]高恒路,桑勇.同步控制策略及其典型应用的研究[J].液压气动与密封,2012,32(5):43-46.
[3]徐社连,侯波.剪叉式升降机液压系统改造[J].液压与气动,2007:75-76.
[4]Zhongwei L.Hydraulic Synchronization Control System and Its Application on Giant Hydraulic Press [J]. Hydraulics Pneumatics & Seals,2007,1:004.
[5]王仁福.几种典型液压同步系统探讨[J].四川冶金,2007,29(3):44-47.
[6]李志忠.电液比例位置跟踪同步控制系统研究[ D].沈阳:东北大学,2015.
[7]谢建,罗治军,田桂,等.基于AMESim的多级液压缸建模与仿真[J].机床与液压,2010,38(7):126-129.
[8]贾晓辉,李宏波.基于自适应PID控制的双护盾TBM液压同步控制系统研究[J].液压气动与密封,2018(4):48-52.
[9]余佑官,龚国芳,胡国良.AMESim仿真技术及其在液压系统中的应用[J].液压气动与密封,2005(3):28-31.
猜你喜欢
学苑创造·C版(2020年12期)2020-01-04
工业设计(2019年4期)2019-06-11
中国高新技术企业(2017年11期)2017-07-08
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
股市动态分析(2016年30期)2016-08-15
大学教育(2016年7期)2016-07-27
科技视界(2016年16期)2016-06-29
现代电子技术(2015年22期)2015-12-02
环球时报(2009-11-23)2009-11-23