图像移位堆叠方法用于暗天然卫星的天体测量∗
2020-06-09 08:15:24李灿伟彭青玉
天文学报 2020年3期
李灿伟 彭青玉
(1 暨南大学计算机科学系广州510632)
(2 暨南大学中法天体测量、动力学与空间科学联合实验室广州510632)
1 引言
太阳系内大行星的天然卫星分为规则卫星和不规则卫星两类. 规则卫星大多以顺行轨道环绕着行星运动, 它们有较小的轨道倾角和偏心率, 通常认为它们是原生卫星. 不规则卫星大多以逆行轨道环绕着行星运动, 它们有较远的距离、较大倾角、偏心率和较低的亮度. Clark等人从Cassini成像分光中发现, 土星的不规则卫星Phoebe的表面可能被来自太阳系外的物质覆盖[1]; Grav等人发现木星的Himalia卫星群的表面与C-Type小行星类似[2]. 这些研究表明这类不规则卫星可能是在太阳系形成早期被捕获的[3]. 因此,对暗弱天然卫星的观测在研究太阳系的形成、演化中有着重要作用.
对暗弱运动目标的观测与恒星观测有较大不同: 观测时, 曝光时间如果过长, 目标成像会拖成长条; 曝光时间如果不足, 目标成像信噪比会过低.
对暗弱运动目标的观测, 在国际上一直备受关注. Tyson等人在1992年提出了图像移位堆叠(shift-and-add)方法[4], 并且Cochran等人使用该方法在探测海王星以外暗弱天体的工作中取得了成功[5]. 在随后的20多年中, 该方法在探测MBA (main-belt asteroid)、NEO (near-earth object)和KBO (Kuiper belt object)等暗弱运动天体的工作中得到了广泛应用[6–8]. Heinze等人于2015年对该方法在不同情境下的应用进行了分析, 通过处理某日夜间的观测资料, 发现了156颗未知行星[9]. 王斌等人从原理上详细分析了图像移位堆叠方法对目标信噪比的影响, 同时试验验证了该方法的可行性[10−11].显然, 该方法在观测以太阳为中心的暗弱运动目标时, 有着极大的优势.
由于天然卫星以行星为中心运动, 所以它们的运动状况与MBA、NEO和KBO相比,具有更大的速度变化. 到目前为止, 还没有人将图像移位堆叠方法应用于暗弱天然卫星的观测.
本文介绍了图像移位堆叠方法观测暗弱天然卫星的方法、步骤及结果分析. 第2部分介绍了天然卫星观测及图像移位堆叠方法, 第3部分是试验及归算过程, 第4部分是结果与分析, 第5部分是总结和展望.
2 天然卫星观测及图像移位堆叠
2.1 观测方式
通常, 为了观测暗弱目标, 必须有足够的曝光时间来获得较高信噪比. 由于天然卫星距离主行星较近, 在计算最长有效曝光时间时, 不能像观测MBA、NEO和KBO时, 仅考虑目标的直线位移, 还需要考虑目标曲线运动的影响. 我们采用边观测边分析的方法, 来获得曝光时间较长且不影响后续测量的图像.
对于同一目标, 在保持望远镜指向不变的前提下, 拍摄多幅上述图像. 每幅图像的曝光时间相同.
2.2 恒星星像对齐
虽然望远镜保持指向不变, 但在拍摄到的多幅相邻图像中, 仍然会产生小幅度的抖动. 在堆叠之前要将这种抖动偏差去除. 具体方法是: 对目标以外的恒星进行定心, 并根据不同图像中相同恒星的定心结果, 求解6常数转换关系[12]:

其中(x,y)是待转图恒星像素坐标, (x′,y′)是与(x,y)对应的基准图的坐标,a、b、c、d、e、f是待解出的6常数. 选定一幅基准图像(例如每一次堆叠使用图像的中间一幅), 根据(1)式求解的参数, 使用双线性内插将待转移的图像转换至基准图像.
2.3 目标星像移位
由于天然卫星是运动的, 在进行图像移位堆叠之前, 要根据目标的运动速度, 将目标移动至同一位置(即基准图像).
在JPL (Jet Propulsion Laboratory)历表中可以查得天然卫星在赤经、赤纬方向速度变化情况. 我们从不同天然卫星系统中分别选取一颗天然卫星作为代表, 在图1中绘制了它们从2018年4月9日零时(UTC)起, 每隔1 h采集一次数据, 5 h内的速度变化情况.图中RA表示赤经方向, DEC表示赤纬方向, JVI是木卫六Himalia, SIX是土卫九Phoebe,UXVII是天卫十七Sycorax, NII是海卫二Nereid. 计算得出, 在1 h内, 赤经方向速度变化最大的是JVI, 变化率是0.103′′ ·h−1, 赤纬方向速度变化最大的是SIX, 变化率是0.018′′·h−1.

图1 不同天然卫星系统典型卫星速度变化Fig.1 Typical satellite velocity changes of different natural satellite systems
相隔时间不大的情况下, 可以认为天然卫星是匀变速运动, 目标在赤经、赤纬方向上移动的距离分别为:

其中∆α是赤经方向距离,δ是赤纬坐标, ∆δ是赤纬方向距离,Vα1和Vδ1分别是基准图像中赤经、赤纬方向速度,Vα2和Vδ2分别是待转移图像中赤经、赤纬方向速度, ∆t是拍摄的时间间隔.
如果需要大量图像移位堆叠, 可以用函数拟合速度变化曲线, 用积分求出更精确的位移量.
然后, 选取目标周围1′–2′范围内的4–5颗参考亮星, 求解出赤经、赤纬方向距离与像素距离的6常数转换关系:

其中∆x是参考星x方向的距离, ∆y是参考星y方向上的距离. 根据求解参数, 得出目标在图像中x、y方向的位移量. 根据像素位移量, 使用双线性内插对图像进行平移, 使目标对齐(在观测前, 通过成像拖尾, 我们保证图像水平轴与赤纬圈有良好的重合, 此外, 用来堆叠的图像数量不超过10幅).
2.4 图像的堆叠
得到多幅目标对齐的图像后, 首先将因图像移动导致像素缺失的边缘裁剪掉(所有图像保持一致性), 然后把所有的图像堆积起来, 每一个像素位置(x,y)处构成了一个像素数组, 取其中值作为该位置的灰度值, 以此类推求出所有像素点的灰度值, 最后得到一幅输出图像. 输出图像中, 恒星会模糊成长条状, 暗弱的目标会呈现一个高斯分布的圆形亮斑. 图2中给出了不同天然卫星堆叠前后的对比, 图中JVIII是木卫八Pasiphae、JIX是木卫九Sinope、JXI是木卫十一Carme.
3 试验及归算过程
3.1 观测资料
本文试验使用的CCD (charge-coupled device)图像是2018年4月9—12日夜间用中国科学院云南天文台1 m望远镜(1 m望远镜)观测获得的(I滤光片). 对比试验采用的CCD图像是2018年4月9日、10日、13日夜间中国科学院云南天文台2.4 m望远镜(2.4 m望远镜)观测获得的(I滤光片). 1 m和2.4 m望远镜及使用的CCD探测器参数见表1.
使用1 m望远镜经过连续4个晚上观测JVI、JVII (木卫七Elara)、JVIII、JIX、JXI(从历表中可以查得, JX (木卫十Lysithea)的亮度低于JXI, 观测是按照亮度递减观测进行的, 故跳过JX), 共获得229幅图像, 不同目标获得的图像数量及曝光时间见表2. 使用2.4 m望远镜经过3个晚上观测相同目标, 共获得130幅图像, 不同目标获得的图像数量及曝光时间见表3.
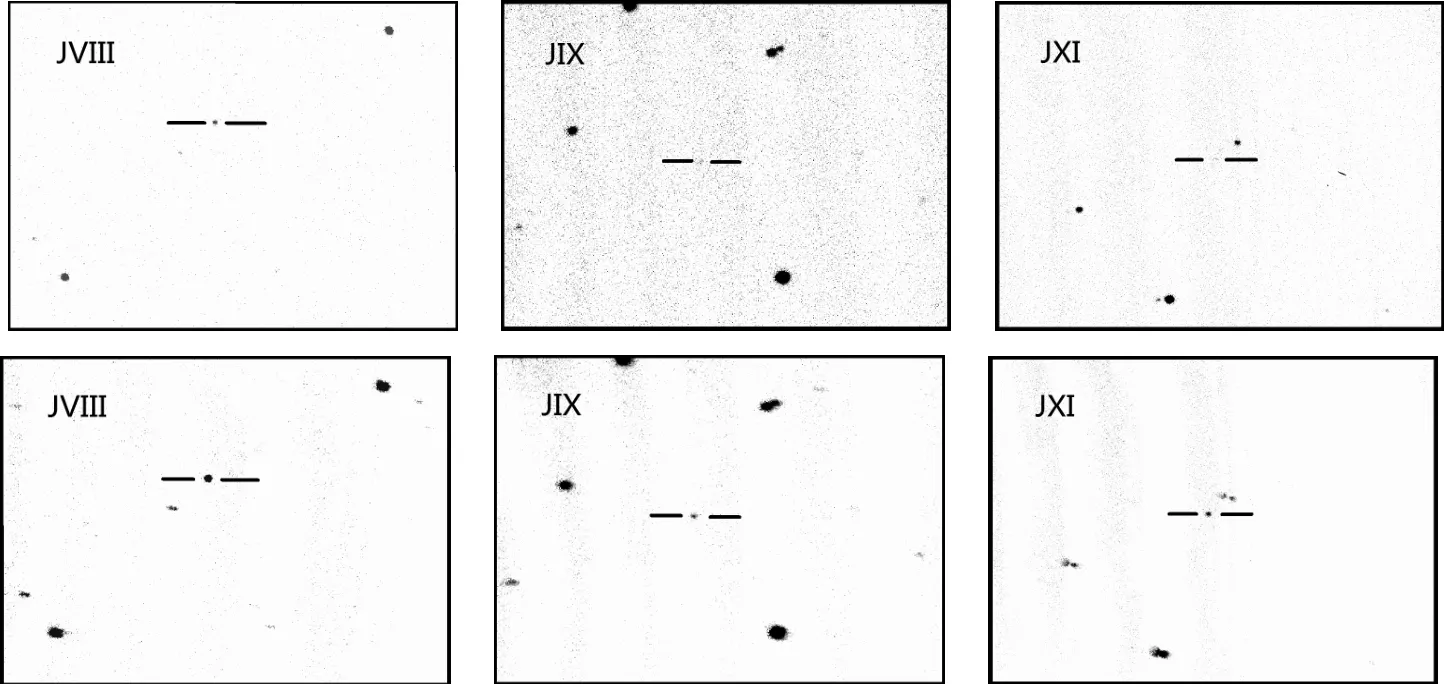
图2 JVIII、JIX、JXI堆叠前(上), 后(下)图像. JVIII堆叠前后均明显可见; JIX堆叠前模糊可见, 堆叠后明显可见;JXI堆叠前不可见, 堆叠后明显可见.Fig.2 Images of JVIII, JIX, JXI before (up) and after (down) stacking. Both before and after stacking JVIII is obvious; before stacking JIX is fuzzily visible, after stacking JIX is obvious; before stacking JXI is invisible, after stacking JXI is obvious.

表1 1 m和2.4 m望远镜和CCD探测器规格Table 1 Specifications of the 1 m and 2.4 m telescopes and CCD detectors

表2 1 m望远镜观测资料分布Table 2 Distributions of observations by 1 m telescope

表3 2.4 m望远镜观测资料分布Table 3 Distributions of observations by 2.4 m telescope
3.2 天体测量及归算过程
在对木星不规则卫星的位置测量及归算中, 我们采用了欧洲空间局最新释放的Gaia DR2 (Data Release 2)[13]作为参考星表, 这个星表由于其恒星统计数量大及精度高的特性, 在位置归算工作中得到了国际上广泛认可. 目标的理论位置选择美国国家航空航天局喷气推进实验室发布的JPL历表.
使用上一节叙述的方法对图像进行堆叠(只对1 m望远镜资料进行堆叠), 我们试验发现, 每10幅堆叠出一幅图像时既能保证目标获得较好的信噪比, 同时速度偏差带来的影响也较小. 所以, 我们将每10幅图像堆叠在一起(时间跨度均小于17 min), 对剩余不足10幅的也堆叠在一起, 堆叠后不同目标图像数量见表4, 表中No. of frames为堆叠后图像数量.

表4 移位堆叠后不同目标图像数量Table 4 Number of images of different targets after shift-and-add
1 m望远镜观测资料堆叠的归算步骤如下:
(1)对于每个堆叠结果, 对堆叠前基准图像中的恒星进行2维高斯函数拟合求解量度坐标, 具体测量方法见文献[14]. 堆叠之后的图像中, 对目标使用相同的方法进行定心;
(2)使用恒星的定心结果和计算出的站心视位置(考虑大气折射), 求解出对应的图像的底片常数;
(3)对星像的定心结果进行几何扭曲(GD)改正. 我们选择了观测日期附近获得的GD模型进行GD改正[15–17];
(4)求得底片常数和扭曲改正后, 归算目标的观测位置, 并与JPL历表进行比较, 获得残差O-C (观测值-计算值).
2.4 m望远镜观测图的归算过程与上述过程基本一致, 不同的是图像未经过堆叠, 目标的位置直接从单帧CCD观测图中测量.
4 结果与分析
我们将1 m望远镜获得观测资料的归算结果与相近日期2.4 m望远镜观测资料的归算结果进行对比分析. 对比结果见表5, 表中赤经和赤纬方向的O-C平均值分别用⟨OC⟩RA和⟨O-C⟩DE表示, 标准差分别用SDRA和SDDE表示. 1 m望远镜的精度是堆叠后图像进行归算的结果, 更准确地可以称之为形式精度.
从表5可以看出,对于较亮的天然卫星(JVI、JVII),本方法得出的归算结果,与2.4 m望远镜资料得出的结果比较, 平均O-C在赤经和赤纬方向有良好的一致性. 对于不能直接测量的暗弱天然卫星(JVIII、JIX、JXI), 本方法得出的归算结果, 与2.4 m望远镜资料得出结果, 平均O-C在赤经方向和赤纬方向同样保持了较好的一致性(在相应的误差范围内).
一般来说, 亮目标相对于暗目标, 历史上的观测数据较多, 理论研究比较完善, JPL历表更加准确, 所以平均残差会比较小. 因此, 理论上目标的平均残差⟨O-C⟩会随着目标的亮度降低而增大. 不同目标平均残差⟨O-C⟩随星等变化见图3, 图中APmag为JPL历表给出的估计星等. 实验中目标位置测量的⟨O-C⟩的总体趋势为: 平均残差会随着目标的亮度降低而增大, 这一结果符合我们的预期.
对于较暗目标(JXI)的位置测量的⟨O-C⟩要好于较亮目标(JVI), 我们这样理解: 实际观测时, 目标可能处于不同相位, 历表不能确保在所有时刻, 亮星的位置一定好于暗星,因此可能会出现暗目标的测量残差好于亮目标的测量残差的情况. 在Gomes-J´unior等人论文中也出现了JXI位置测量的⟨O-C⟩好于JVI的情况[3].
我们可以得出这样的结论: 1 m望远镜无法直接观测测量的暗弱天然卫星(如JIX、JXI), 使用本方法处理后, 不仅能进行有效地观测测量, 同时还保持了较好的准确度,⟨O-C⟩与2.4 m望远镜的归算结果具有较好一致性.

图3 不同目标平均残差绝对值分布Fig.3 Distribution of absolute values of mean residuals of different targets
5 总结和展望
本文介绍了小口径望远镜对于暗弱天然卫星的观测测量的局限性及使用图像移位堆叠方法提高望远镜对暗弱天然卫星的观测能力的试验. 用1 m望远镜观测木卫的若干资料进行了试验, 同时和2.4 m望远镜在相近日期的观测资料归算结果进行了对比. 数据处理结果表明, 应用图像移位堆叠在1 m望远镜上, 能在保持较高可信度的O-C及精度的同时, 可观测暗达近19等的暗弱天然卫星.
本文针对1 m望远镜拍摄的木星部分卫星做了试验. 类似地, 可以进一步将此方法用于其他行星的卫星. 也可以将此方法用于2.4 m望远镜, 提高观测暗弱卫星的极限星等.
本文试验中, 如果结合王斌等人的迭代方法[10–11], 有可能减少因为目标速度不准确带来的误差以及发现未知天然卫星.
致谢感谢中国科学院云南天文台1 m望远镜和2.4 m望远镜运行组全体成员的帮助和支持, 感谢王娜、林孚荣、郑中杰在项目工作中的帮助和支持.
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:40
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
数学物理学报(2020年2期)2020-06-02 11:29:18
船舶标准化工程师(2019年4期)2019-07-24 07:21:24
自动化学报(2019年6期)2019-07-23 01:18:32
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
小哥白尼(趣味科学)(2018年6期)2018-09-14 06:10:58
数学物理学报(2018年3期)2018-07-17 06:15:28
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:02