光学测风数据处理系统设计与实现∗
2020-06-11 14:29
舰船电子工程 2020年3期
(陆军炮兵防空兵学院士官学校 沈阳 110867)
1 引言
光学测风是指通过光学测风经纬仪实时观测空中气球仰角、方位角,进而计算获取空中各高度风向、风速的气象保障模式,其以操作便捷、作业灵活受到各气象保障分队的青睐,可有效完成单经纬仪观测固定升速测风气球测风(又称小球测风)[1]、双经纬仪观测测风气球测风(又称基线测风)[2~5]等作业模式下的气象保障。在传统的作业流程中,风向、风速数据多于观测结束后通过手工作业或气象计算器计算获取[6],运算效率低,处理精度差,且缺乏有效的数据通信手段,从而制约气象分队保障时效和训练效率的提升。有鉴于此,文中基于Android便携式终端平台和计算机终端平台构建了光学测风数据处理系统,可有效实现数据的实时精确处理及通信传输。
2 系统设计
2.1 系统描述
光学测风数据处理系统立足于光学测风保障模式的特点和流程,以实现气象观测数据的实时采集、实时处理、实时传输为目标,主要用于气象分队固定台站保障和野外机动保障的测风数据处理,可实现以下功能。
1)测风计算。可完成小球测风、基线测风两种作业模式下的数据采集或录入计算,实现各高度层风、真风、弹道风的数据处理,编制气象报文。
2)数据管理及通信。可完成实时观测数据、历史观测数据、气象产品数据的存储、汇交、修订、复算、分析等;可通过串口通信实现观测数据采集及汇交;可通过北斗通信短报文功能[7~10]完成整分钟数据及气象报文的通信传输。
3)参数获取。系统可于便携终端完成观测点的定位以及地面参数如基线参数、净举力参数等的计算获取。
2.2 系统结构
光学测风数据处理系统由计算机终端、便携式终端、北斗用户机、测风经纬仪等部分组成。如图1所示。
系统中,计算机终端采用Windows主流系统,作为观测数据的管理中心,可对观测数据进行入库、管理、复算等;便携式终端采用加固Android便携式用户机,内置北斗模块,可实现观测点的定位、导航及气象报文的数据传输,主要用于观测数据的实时采集、实时处理、实时传输,便于携行作业。
测风经纬仪每隔一分钟实时采集一次观测数据,以观测时间、仰角、方位角的形式通过串口传输至便携式终端;便携式终端根据观测数据实时计算各高度的风向风速信息,编制气象报文,并可通过北斗短报文功能将其传输至北斗用户机。计算机终端通过串口与北斗用户机相连,对观测的气象数据进行采集和管理。便携式终端与计算机终端可通过串口进行通信,实现观测资料的入库管理。
在小球测风作业模式中,可将便携式终端作为数据采集处理端,计算机终端作为数据管理端;在基线测风作业模式中,两观测点分别配备便携式终端及测风经纬仪,各测风经纬仪通过北斗模块授时功能实现时间上的协同,两观测点可选取一处作为数据处理端,另一观测点每隔一分钟将采集的实时数据通过北斗模块传输至数据处理终端,实现数据的实时运算。
2.3 数据存储与管理
由于便携式终端存储空间相对较小,其数据以文件形式存储,主要存储实时观测资料及少量历史观测资料,并定期汇交至计算机终端。计算机终端作为数据主管理终端,可完成实时观测资料、历史观测资料的存储与管理,由数据库子系统完成,主要包括系统基础库及观测信息库,如图2所示。
其中,系统基础库主要存放用户信息、用户配置信息、通信信息、台站信息等。观测信息库主要存放地面参数信息,如观测时间、观测地点、台站高程、台站经纬度、地面风、基线参数等数据;空中观测信息,如采集时间、仰角、方位角等数据;空中风结果数据,如各计算层风向风速、各高度真风风向风速、各弹道高度风向风速等;气象产品数据,如气象通报、自由报文等。
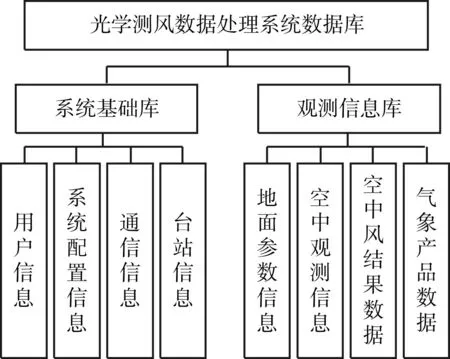
图2 计算机终端数据库组成图
3 系统实现
3.1 计算机终端数据处理分系统
计算机终端数据处理分系统采用VC++与Matlab混合编程[11~12]研发,主要由数据处理模块、数据分析模块、数据管理模块、通信模块组成。如图3所示。
其中数据处理模块用于小球测风、基线测风历史观测资料的数据运算或复算;数据分析模块用于历史观测资料原始数据、气象产品数据的显示和分析;数据管理模块可完成便携式终端观测资料的汇交、入库,同时完成数据库中历史观测的管理;通信模块由串口通信、北斗通信组成,串口通信可对串口号、波特率、校验位等进行设置,以实现对北斗用户机的访问控制,北斗通信主要完成北斗通信的地址管理以及气象报文信息的查阅和实时接收。
分系统软件主界面如图4所示。

图4 计算机终端分系统软件主界面
3.2 便携式终端数据处理分系统
便携式终端数据处理分系统基于Android编程环境研发,主要由小球测风模块、基线测风模块、结果显示模块、数据管理模块、定位模块、净举力计算模块、基线参数计算模块、通信模块8个模块组成。
小球测风模块、基线测风模块是数据处理系统的主要模块,主要用于地面参数的录入、气球升速的选择、各时段测风经纬仪仰角方位角数据的采集或录入、以及各高度风向风速的计算。
结果显示模块用于各规定高度运算结果和气象产品的数据显示、曲线显示。
数据管理模块用于少量历史观测资料的查看、复算、修改、删除等管理操作,增强数据的利用率。
定位模块用于观测台站的定位,可通过北斗、GPS、网络及混合定位模式实现台站经纬度坐标及高斯坐标的获取,为基线参数测量及气象台站高程参数的获取提供支撑。
净举力计算模块用于小球测风作业模式下固定升速的净举力查算,文中通过曲线拟合将气象常用表中的离散数据连续化,根据实时气温、气压及附加物中获取规定升速下的标准空气密度值及净举力,简化小球测风的作业准备流程。
基线参数计算模块用于基线测风作业模式下基线长度、基线仰角、基线方位角、两观高程差等基线参数的计算。
通信模块用于通串口通信和北斗通信的设置。其中串口通信可对串口参数进行设置,以实现与测风经纬仪实时采集数据的数据传输;北斗通信用于与北斗用户机或其他便携式终端进行通信匹配,实现气象观测数据、报文数据的通信传输。
数据处理流程如图5所示。

图5 便携式终端数据处理流程图
分系统软件界面如图6所示。
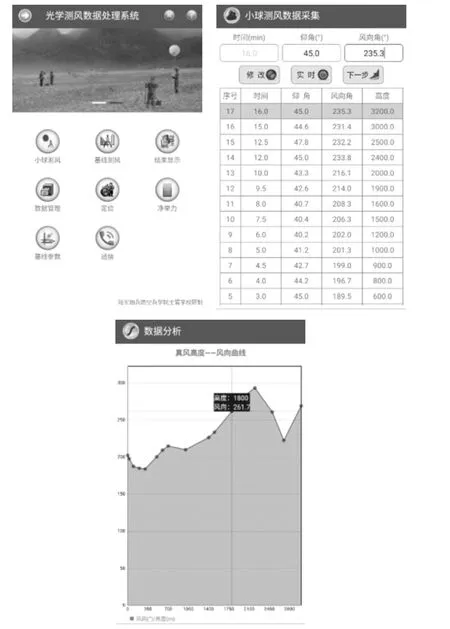
图6 便携式终端分系统软件主界面
4 系统分析
光学测风数据处理系统在保持光学测风作业灵活性的基础上,通过配置便携式终端,可实现测风经纬仪数据的实时采集、实时处理、实时传输,有效提高作业效率和保障时效性,通过计算机终端,完成数据汇交及管理,提高了野外观测数据的利用率,对分析区域性风要素变化规律提供数据支撑。
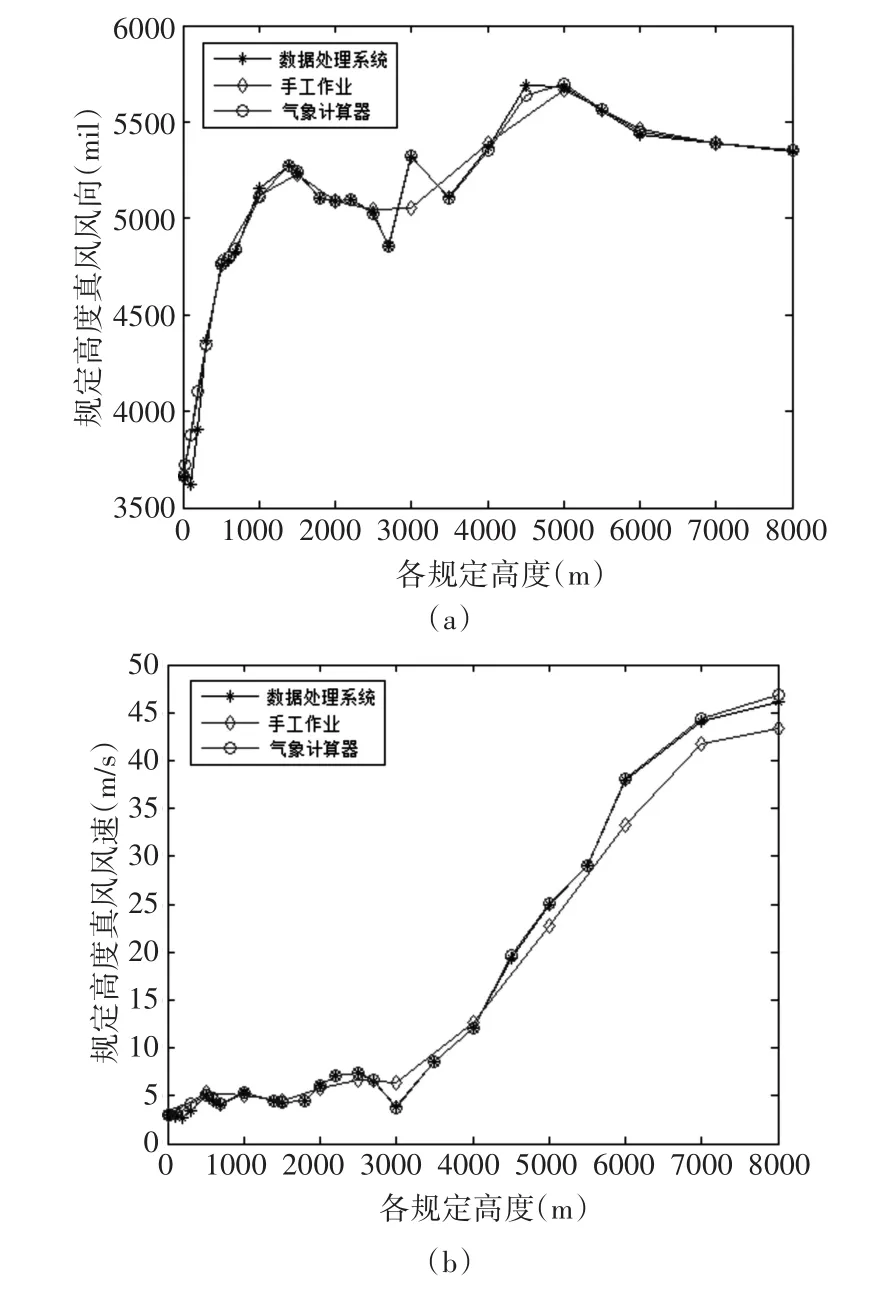
图7 数据处理精度对比图
为分析系统数据处理的准确性,文中结合大量实装观测数据,分别通过光学测风数据处理系统、某型气象计算器及手工作业模式对数据进行了比对分析。以沈阳地区2018年9月某次实装观测数据为例,如图7所示。
图中分别为各高度真风风向风速变化曲线,其中风向以密位为单位。从图中可以看出,光学测风数据处理系统与气象计算器处理结果具有较好的一致性,各高度风向最大误差48密位,约2.88°,风速最大误差0.7m/s,这主要是由于数据处理模型的差异,光学测风数据处理系统采用了更为精密的矢量分解模型[13~14]。手工作业由于运算中进行了大量的简化和近似,精度稍差,但风向风速随高度的总体变化趋势相同。
5 结语
本文采用北斗通信、嵌入式开发等技术,对光学测风数据处理系统进行了设计与实现。系统结构设计合理、人机环程度高,可有效解决测风作业数据处理精度低、时效性差、通信传输难等问题,简化测风作业流程,提升气象分队测风作业的训练效率和训练效果,满足复杂战场环境的测风保障需求。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
导航定位学报(2021年5期)2021-10-13
建材发展导向(2021年12期)2021-07-22
数字海洋与水下攻防(2020年5期)2021-01-04
计算机技术与发展(2020年4期)2020-04-30
现代计算机(2020年3期)2020-03-05
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01