基于STM32F407的双足机器人
2020-06-15 06:30赵佩佩刘程瑞王可煦於文祚
科教导刊·电子版 2020年5期
关键词:串口通信
赵佩佩 刘程瑞 王可煦 於文祚

摘 要 本系统以STM32单片机为系统的中央控制器,将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等结合,构成整个双足行走机器人,达到行走、做动作的目的。单片机中央控制器与舵机控制器以串口通信方式实现。硬件包括舵机控制器,按键,各种传感器和数据采集与处理单元。软件包括单片机初始化、主程序、信号采集中断程序、通过串口通讯的接收和发送程序。
关键词 双足机器人 STM32 串口通信
0引言
在步行方式中两足步行是最为复杂、自动化水平最高的动态系统。本设计以对两足行走机器人的行走控制为目的,来研究两足机器人的行走过程。为实现机器人的稳定行走本系统以STM32单片机为系统的中央控制器,将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等结合,构成整个双足行走机器人,达到行走、做动作的目的。
1硬件部分
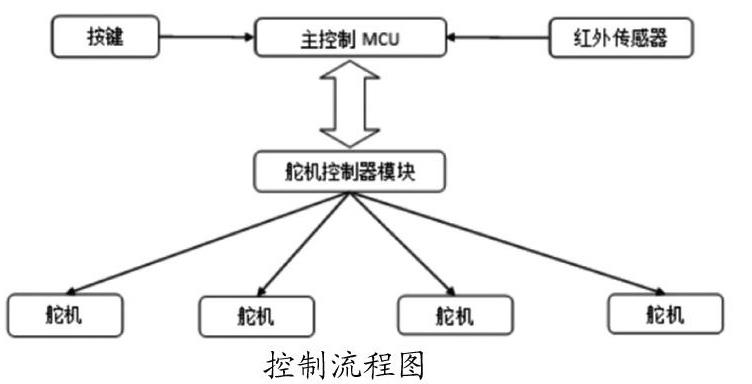
双足行走机器人系统其硬件部分主要由五大部分构成:
(1)控制单元。单片机STM32是系统中控制部分关键的元件,它与控制单元组成控制部分功能。负责整个机器行动的方式,以及处理外部环境变化的,改变机器人行走路线的任务。
(2)舵机控制模块。主芯片为单片机STM32,模块与控制单元进行串口通信从而达到控制信息的传输。舵机控制模块通过接收控制信息来产生控制舵机的PWM波形。从而实现行走控制。
(3)传感器数据采集系统。利用传感器采集信息,为机器人提供准确的外部环境数据。控制单元通过接收的外部信息来改变控制信号,来让机器人产生行动变化。
(4)受控部件。通过控制舵机,通过精确的角度变化让机器人完成行走的基本目的。其主要受控于舵机模块。通过PWM进行控制。
(5)支架。组成机器人的躯干,搭载机器人全部电子器件。
2软件部分
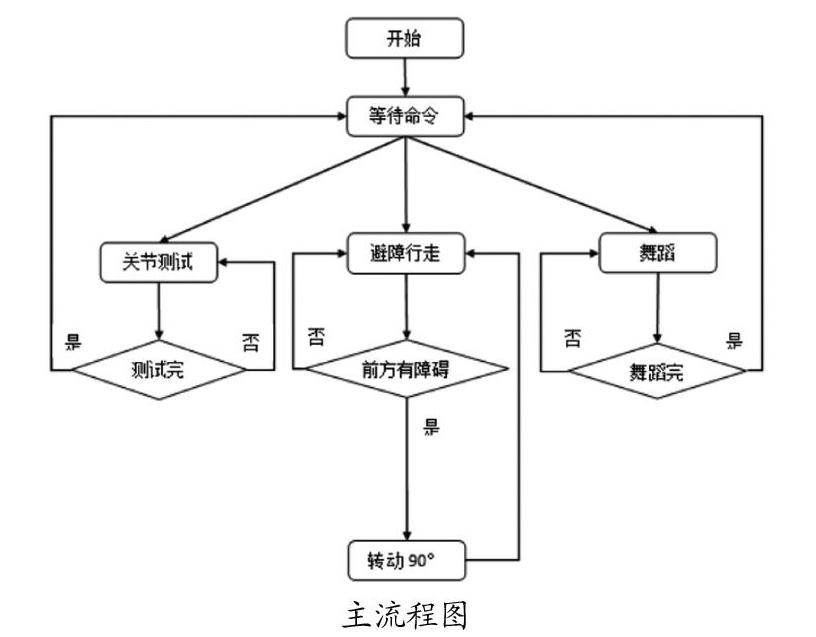
软件设计设计方案主要由三大部分构成:
(1)主程序设计。接收器将手柄的遥控信号通过串口发送给单片机STM32,然后由单片机对信号进行分析处理后正确识别后执行相应的中断动作子程序,输出匹配的舵机控制指令,控制机器人完成相应的姿态动作。
(2)在机器人行进的过程中,使用红外传感器对外部環境进行检测,并将信息传递给单片机然后进行处理,并执行相应的舵机控制指令。
(3)在设计动作时,利用串口通信的方式,通过上位机调试每个舵机不同转动角度并得到对应的指令控制数据,建立数据库,方便程序调用。
3结语
本系统的核心处理器为给予ARM Cortex-M4内核的STM32处理器,高性能以及低功耗的优点大大提高了系统的可靠性。本设计选择4自由度机器人作为设计的框架,并在其基础上进行设计,简单的4个关节即可实现行走目的,适用性强,易于控制,减少了开发时间。
参考文献
[1] 张熙婷,胡心悦,陶蕾,张佳宁.双足步行机器人设计[J].机械研究与应用,2017,30(06):147-149.
[2] 曾显武.双足机器人设计及步态规划仿真[D].济南:山东大学,2019.
[3] 戚龙.双足步行机器人控制系统的开发应用[J].电子世界,2018(23):161-162.
[4] 查华臣.双足步行机器人控制系统设计[D].南京:东南大学,2018.
猜你喜欢
现代电子技术(2017年1期)2017-02-16
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年15期)2015-08-14