探月卫星嫦娥三号探测器着陆轨道设计
2020-06-15 22:48温宇鹏
卫星电视与宽带多媒体 2020年8期
温宇鹏
【摘要】月球探测器着陆轨道近远月点位置及速度的确定是月球探测器成功着陆的关键,本文以嫦娥三号探测器为背景,对其运动轨迹进行分析,利用抛物线方程及行星运动规律,确定了嫦娥三号探测器着陆轨道近远月点位置及速度。
【关键词】软着陆;抛物线方程;行星运动;嫦娥三号
“嫦娥三号”探月卫星于2013年12月2日1时30分成功发射,12月10日抵达准备着陆轨道,随即进行月球软着陆。“嫦娥三号”成功实现软着陆对我国探月工程的发展有着重要意义。
“嫦娥三号”在着陆准备轨道上的运行质量为2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。嫦娥三号的预定着陆点为(19.51W,44.12N),海拔为-2641m。
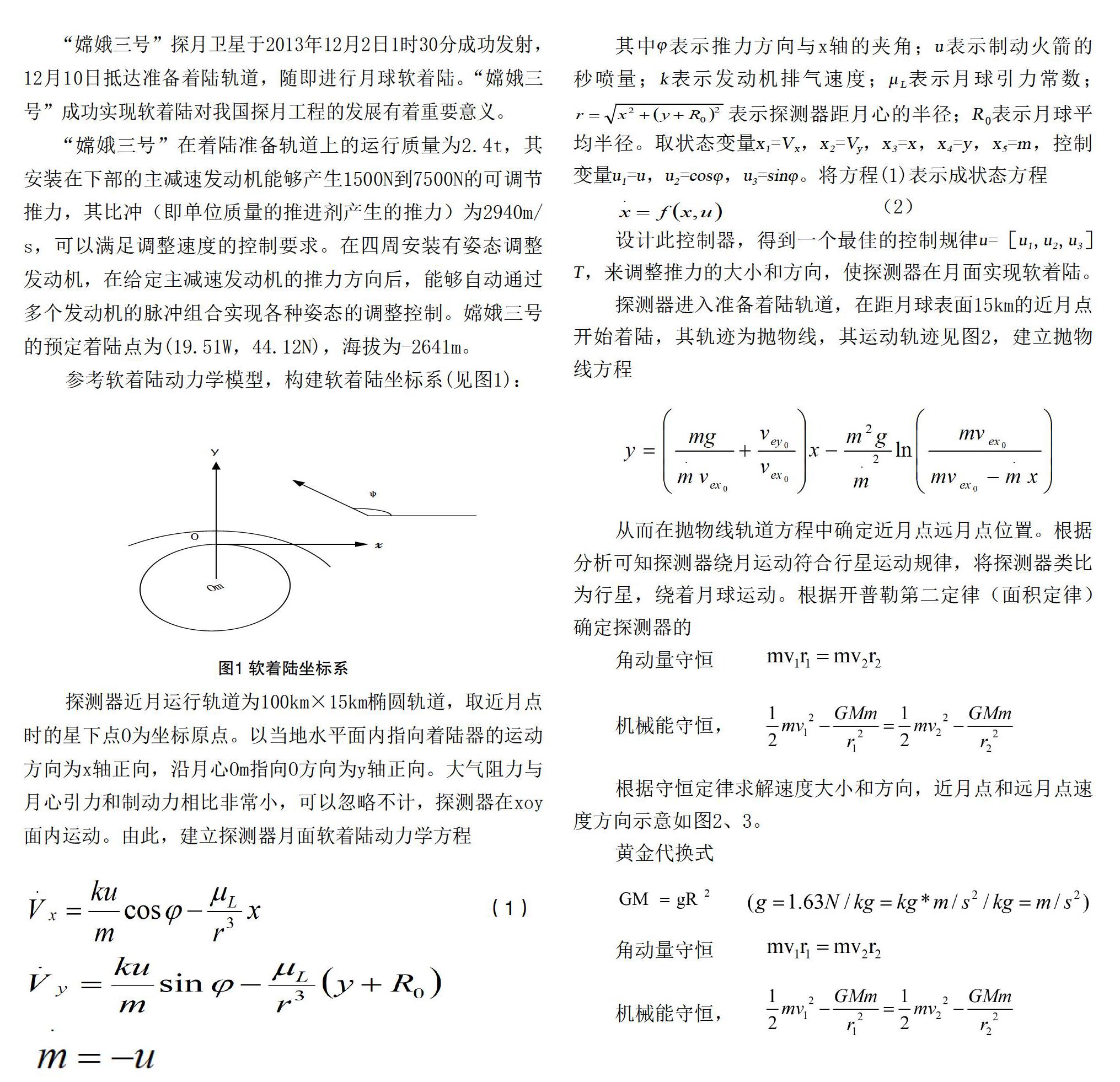
参考软着陆动力学模型,构建软着陆坐标系(见图1):
探测器近月运行轨道为100km×15km椭圆轨道,取近月点时的星下点O为坐标原点。以当地水平面内指向着陆器的运动方向为x轴正向,沿月心Om指向O方向为y轴正向。大气阻力与月心引力和制动力相比非常小,可以忽略不计,探测器在xoy面内运动。由此,建立探测器月面软着陆动力学方程
其中φ表示推力方向与x轴的夹角;u表示制动火箭的秒喷量;k表示发动机排气速度;μL表示月球引力常数;表示探测器距月心的半径;R0表示月球平均半径。取状态变量x1=Vx,x2=Vy,x3=x,x4=y,x5=m,控制变量u1=u,u2=cosφ,u3=sinφ。将方程(1)表示成状态方程
设计此控制器,得到一个最佳的控制规律u=[u1,u2,u3]T,来调整推力的大小和方向,使探测器在月面实现软着陆。
探测器进入准备着陆轨道,在距月球表面15km的近月点开始着陆,其轨迹为抛物线,其运动轨迹见图2,建立抛物线方程
从而在抛物线轨道方程中确定近月点远月点位置。根据分析可知探测器绕月运动符合行星运动规律,将探测器类比为行星,绕着月球运动。根据开普勒第二定律(面积定律)确定探测器的
角动量守恒
机械能守恒,
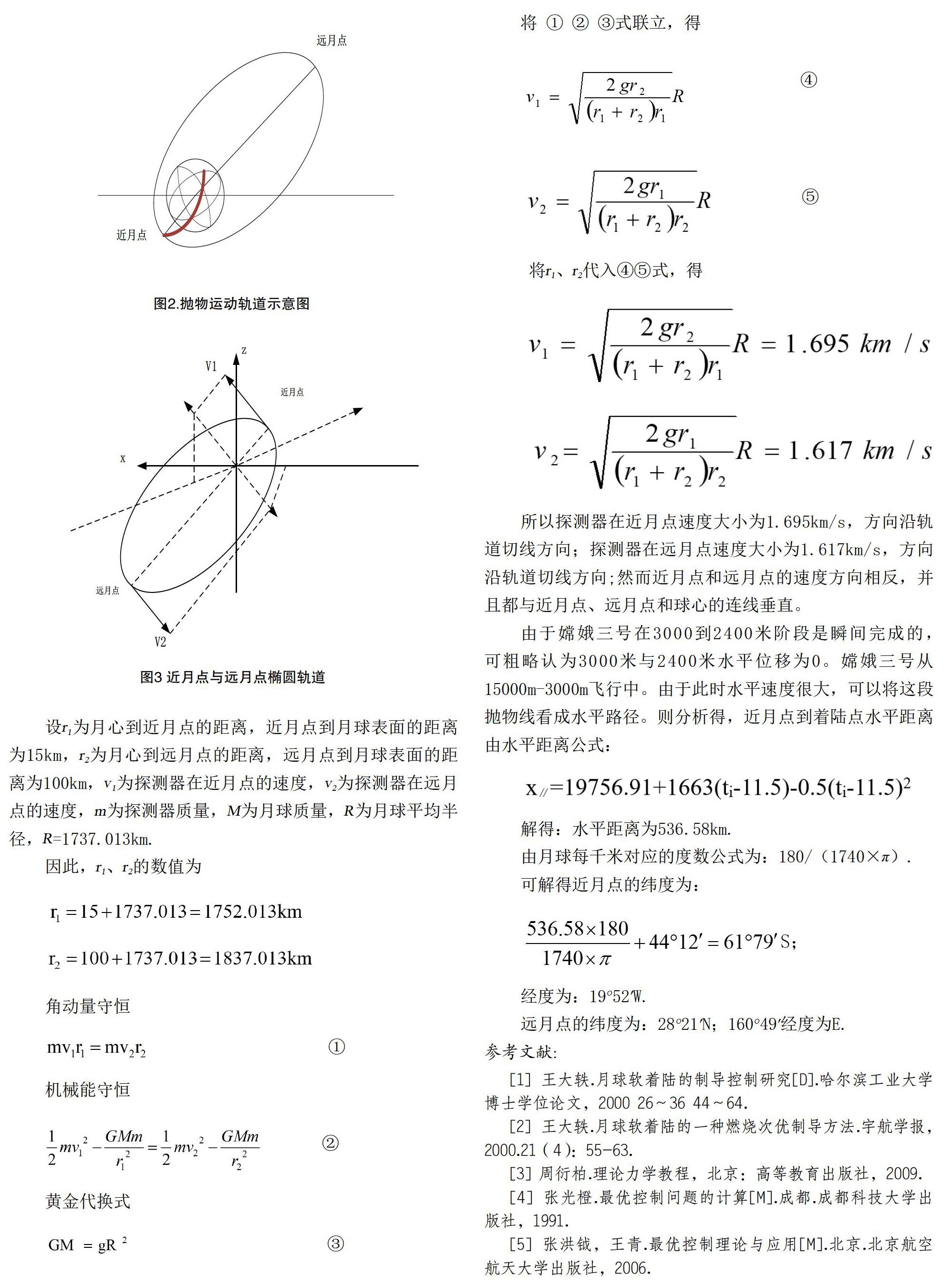
根据守恒定律求解速度大小和方向,近月点和远月点速度方向示意如图2、3。
设r1为月心到近月点的距离,近月点到月球表面的距离为15km,r2为月心到远月点的距离,远月点到月球表面的距离为100km,v1为探测器在近月点的速度,v2為探测器在远月点的速度,m为探测器质量,M为月球质量,R为月球平均半径,R=1737.013km.
所以探测器在近月点速度大小为1.695km/s,方向沿轨道切线方向;探测器在远月点速度大小为1.617km/s,方向沿轨道切线方向;然而近月点和远月点的速度方向相反,并且都与近月点、远月点和球心的连线垂直。
由于嫦娥三号在3000到2400米阶段是瞬间完成的,可粗略认为3000米与2400米水平位移为0。嫦娥三号从15000m-3000m飞行中。由于此时水平速度很大,可以将这段抛物线看成水平路径。则分析得,近月点到着陆点水平距离由水平距离公式:
解得:水平距离为536.58km.
由月球每千米对应的度数公式为:180/(1740×π).
可解得近月点的纬度为:
经度为:19°52′W.
远月点的纬度为:28°21′N; 160°49′经度为E.
参考文献:
[1] 王大轶.月球软着陆的制导控制研究[D].哈尔滨工业大学博士学位论文,2000 26~36 44~64.
[2] 王大轶.月球软着陆的一种燃烧次优制导方法.宇航学报,2000.21(4):55-63.
[3] 周衍柏.理论力学教程,北京:高等教育出版社,2009.
[4] 张光橙.最优控制问题的计算[M].成都.成都科技大学出版社,1991.
[5] 张洪钺,王青.最优控制理论与应用[M].北京.北京航空航天大学出版社,2006.