四轮转向车辆后轮转角模糊控制器的研究
2020-06-20 03:35曹艳玲乔梦楠
机械设计与制造 2020年6期
曹艳玲,乔梦楠
(河南科技大学车辆与交通工程学院,河南 洛阳 471003)
1 引言
随着汽车产业以及社会交通的逐年发展,驾驶车辆时的安全性与操纵稳定性得到了越来越多的重视。四轮转向[1](Four-Wheel Steering,4WS)技术的出现与发展在很大程度上提高了车辆行驶时的操纵稳定性以及灵活性,为汽车产业带来了新的发展空间。四轮转向技术是一种能够同时分别控制前轮与后轮进行独立转向的技术。车辆低速行驶时,后轮与前轮反向转向,以减小车辆的转弯半径;车辆中高速行驶时,后轮与前轮同向转向,以减小车辆的质心侧偏角、横摆角速度、侧倾角。与传统的前轮转向(Front-Wheel Steering,FWS)技术相比,四轮转向技术能够有效地提高车辆低速时的转向灵活性,中高速时的操纵稳定性,因此也能在一定程度上减少侧滑甩尾等事故发生的概率,提高车辆的主动安全性。
四轮转向技术发展至今,人们提出了多种四轮转向车辆后轮转角控制方法。文献[2-3]在车辆二自由度动力学模型的基础之上,分别采用横摆率反馈控制方法、模糊自适应PID控制方法,设计了四轮转向车辆的后轮转角控制器。该模型忽略了车辆行驶时产生的侧倾运动,导致车辆在高速或大转角行驶时可能会产生较高的侧倾角以及侧倾角速度,从而影响车辆的操纵稳定性。文献[4-5]分别通过二自由度、三自由度车辆动力学模型,采用前后轮比例控制策略,设计了四轮转向车辆转向控制器。四轮转向车辆在实际行驶过程中,前后轮转角比例是复杂的非线性关系,比例因子应是实时变动且非线性的动态值,而非固定不变的定值。采用比例控制器,恰恰未能很好的解决这一问题。文献[6]基于最优控制理论,以汽车转向理想状态模型作为控制目标,采用状态反馈、前轮前馈的控制策略,对四轮转向汽车后轮转向控制进行了研究。该方法在使用时忽略了车速对于后轮转角的影响,使得车辆操纵稳定性的提高存在一定的局限性。
为了能够更加有效地增强四轮转向车辆行驶过程中的操纵稳定性,在总结前人工作的基础上,将车辆的侧倾运动融入车辆动力学模型中,建立了四轮转向车辆三自由度动力学模型。综合考虑前后轮转角的非线性关系,以及车速对后轮转角大小的影响,建立了以模糊控制理论为基础、以前轮转角和车速作为控制器输入的后轮转角模糊控制器。最后运用Matlab/Simulink软件,将所建立的四轮转向车辆转向控制器与基于比例控制、反馈控制的四轮转向车辆进行了对比仿真,并总结分析了所建立控制模型的有效性。
2 四轮转向车辆三自由度动力学模型的建立
常用的车辆二自由度模型仅考虑了汽车的侧向、横摆运动,而侧倾运动也能在很大程度上体现出车辆在转向时的性能好坏。因此,在原有的车辆二自由度模型的基础上,加入了侧倾自由度,建立起四轮转向车辆三自由度动力学模型,如图1所示。
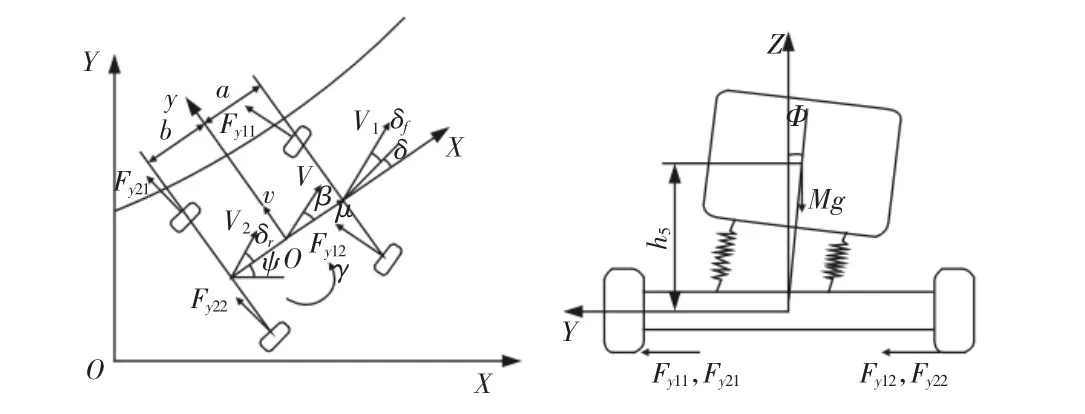
图1 四轮转向车辆三自由度动力学模型Fig.1 Three Degrees of Freedom Dynamics Model of the Four Wheel Steering Vehicle
图中:规定XYZ—大地坐标系;xyz—车辆坐标系。x轴以车辆前进方向为正方向,y轴以车辆左侧为正方向,z轴以向上为正方向;坐标系中的角度、角速度、角加速度,除侧倾角、侧倾角速度以右倾为正方向以外,其余均以左转为正方向。根据以上假设和规定,通过动力学分析可得到如下车辆运动微分方程:
侧向运动微分方程:

横摆运动微分方程:

侧倾运动微分方程:

式中:M—整车质量;Ms—悬挂质量;hs—悬挂质量质心到侧倾轴距离;a,b—质心到前后轴距离;V—车速;u—车速在x轴上的分量;K1,K2—前后轮侧偏刚度;δf,δr—前后轮转角;Ef,Er—前后轮侧倾转向系数;Iz—横摆转动惯量;Ixz—车辆悬挂质量绕侧倾轴以及横摆轴的惯性积;Ix—车辆悬挂质量绕侧倾轴的转动惯量;Cφ—前后悬架侧倾阻尼;Kφ—前后悬架侧倾刚度;β—车辆质心侧偏角;γ—横摆角速度;φ—侧倾角;p—侧倾角速度。
其中,δf,V—模糊控制器输入变量;δr—模糊控制器输出变量;β,γ,φ,p—车辆运动状态。
将式(1)~式(3)以及 p=φ˙化简整理后可得四轮转向车辆三自由度动力学模型的运动微分方程为:

其中,参考车型各参数数值[7-8],如表1所示。

表1 参考车型各参数数值Tab.1 Parameter Values of the Reference Vehicle
3 后轮转角模糊控制器的设计
无论如何简化车辆模型,车辆转向时仍具有较强的非线性特性,难以建立求解后轮转角的精确的数学模型,因此控制器的设计不能完全依赖于精确的数学模型。由于模糊控制理论具有无需知道被控对象的数学模型、构造容易、鲁棒性好等优点[9],因此采用模糊控制理论设计后轮转角控制器。
3.1 模糊控制原理
模糊逻辑控制(FuzzyLogicControl)简称模糊控制(FuzzyControl),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。模糊控制实质上是一种非线性控制,属于智能控制的范畴。模糊控制的最大特点是它既有系统化的理论,又有大量的实际应用背景。模糊控制器的设计主要包括四部分内容[9]:定义变量、模糊化、规则库、解模糊。
3.2 定义变量及模糊化
模糊控制器设计的目的是控制四轮转向车辆后轮转角的大小,而前轮转角以及车速对其大小具有重要的影响。因此,该控制器选用δf,V作为输入变量,选用δr作为输出变量。根据有关车辆最大转角的计算方法,车辆转角最大在(30~40)°之间,模型中选用0.7rad(约40.1°)为前后轮转角的上限值。根据我国有关道路法律法规[10]记载,我国车辆在各种道路行驶时最高车速为120km/h,模型选取34m/s(122.4km/h)作为车速的上限值。依据论域确定的有关方法,将前轮转角、后轮转角、车速的论域分别选取为[-7,7]、[-0.7,0.7]、[0,340]。最终确定输出输入变量的基本论域、论域、量化因子、比例因子,如表2所示。
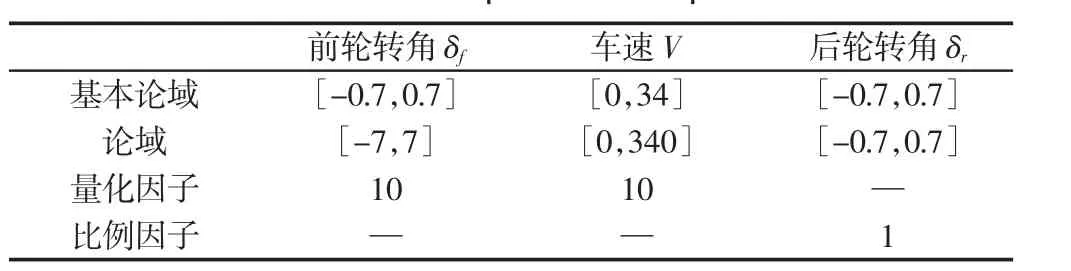
表2 输入输出变量定义Tab.2 Definitions of Input and Output Variables
确定输入输出变量后,进行论域分割,确定确定各变量的模糊集合。该控制器所选用的各变量的模糊集合如下:
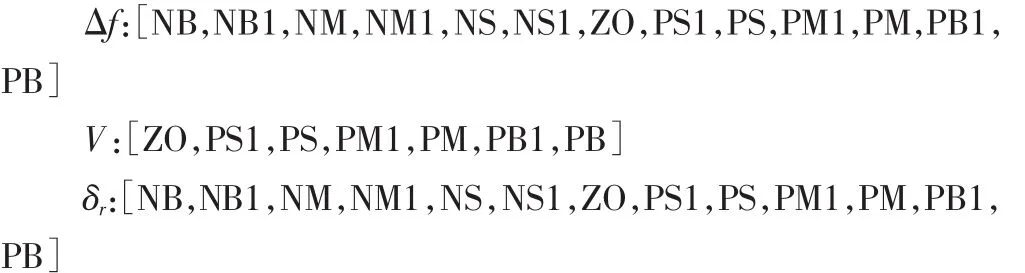
根据前轮转角、车速、后轮转角三者的变化规律及关系,以及模糊控制理论中各隶属度函数的特点,文中控制器选用三角形、梯形隶属度函数曲线作为前后轮转角的隶属度函数,选用三角形隶属度函数曲线作为车速的隶属度函数。输入与输出变量的隶属度函数图,如图2所示。

图2 输入输出变量隶属度函数Fig.2 Membership Functions of Input and Output Variables
3.3 规则库及解模糊

表3 模糊控制规则Tab.3 Fuzzy Control Rules
采用状态评估模糊控制规则(ifx1is A1 and x2 is A2….andxn is An,then y is Ci)建立文中模糊控制器的模糊控制规则库。根据上一小节中确定的模糊集合以及输入输出变量之间的关系,并通过实验分析以及专家经验可确定出模糊控制规则,如表3所示。解模糊化是指将推论所得到的模糊值转换为精确值,做为控制器的精确输出。选用重心法对输出变量的模糊值进行精确求解。建立好模糊控制器后便可观察到模糊规则输出曲面,如图3所示。

图3 模糊规则输出曲面Fig.3 Output Surface of Fuzzy Rules
4 对比仿真分析
4.1 仿真Matlab/Simulink模型的建立
选用δf,V作为控制器输入变量,δr作为控制器输出变量,同时三者共同作为四轮转向车辆模型的输入变量,β,γ,φ,p作为表示车辆运动状态的变量,建立起四轮转向车辆转向Simulink模型,如图4所示。并与基于比例控制、反馈控制的四轮转向车辆控制模型进行对比仿真,构建对比仿真Simulink模型。其中,比例控制中比例系数为0.2,反馈控制采用横摆率反馈控制,反馈系数为0.2。

图4 模糊控制四轮转向Simulink模型Fig.4 Simulink Model of Four Wheel Steering Based on Fuzzy Control
4.2 仿真过程及结果
根据所构建的Simulink模型,设置四组工况下的对比仿真。其中,模糊控制与比例控制设置 δf=0.1rad,V=30m/s;δf=0.3rad,V=20m/s两组工况进行对比仿真。模糊控制与反馈控制设置δf=0.1rad,V=15m/s;δf=0.5rad,V=15m/s两组工况进行对比仿真。并对每组的β,γ,φ,p的结果进行对比分析,以验证文中所建立的四轮转向车辆转向控制模型的有效性。模糊控制与比例控制对比模型的仿真结果,如图5、图6所示。
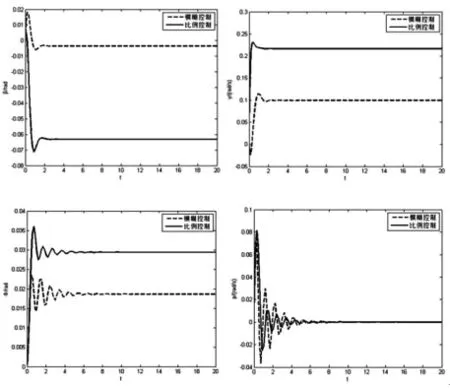
图5 δf=0.1rad,V=30m/s比例控制与模糊控制仿真结果Fig.5 Simulation Wesults of Proportional Control and Fuzzy Control While δf=0.1rad,V=30m/s

图6 δf=0.3rad,V=20m/s比例控制与模糊控制仿真结果Fig.6 Simulation Results of Proportional Control and Fuzzy Control While δf=0.3rad,V=20m/s
通过图5、图6所示的对比仿真结果可以看出:在δf=0.1rad,V=30m/s的工况下,模糊控制器得到的β稳定值在(0~-0.01)之间,γ稳定值在(0.1~0.15)之间,φ稳定值在(0.015~0.02)之间。而比例控制器的β稳定值则在(-0.06~-0.07)之间,γ稳定值在(0.2~0.25)之间,φ稳定值在(0.025~0.03)之间。模糊控制器得到的p值的最大值要小于比例控制器,震荡幅度略大于比例控制器。在δf=0.3rad,V=20m/s的工况下,模糊控制器得到的β稳定值在(0~0.02)之间,γ 稳定值在(1.4~1.6)之间,φ 稳定值在(0.06~0.08)之间。而比例控制器的β稳定值则在(0~-0.02)之间,γ稳定值在(1.6~1.8)之间,φ 稳定值在(0.06~0.08)之间。模糊控制器得到的 p值的最大值以及震荡幅度与比例控制器几乎相同。模糊控制与反馈控制对比模型的仿真结果,如图7、图8所示。
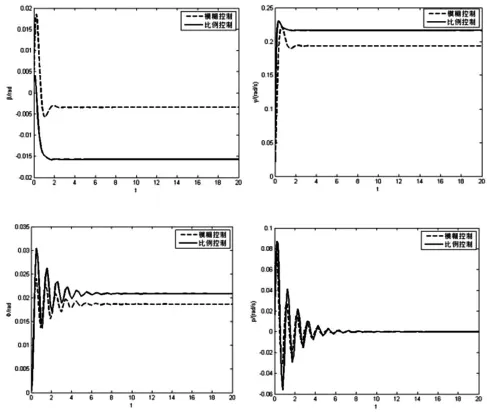
图7 δf=0.1rad,V=15m/s反馈控制与模糊控制仿真结果Fig.7 Simulation Results of Feedback Control and Fuzzy Control While δf=0.1rad,V=15m/s
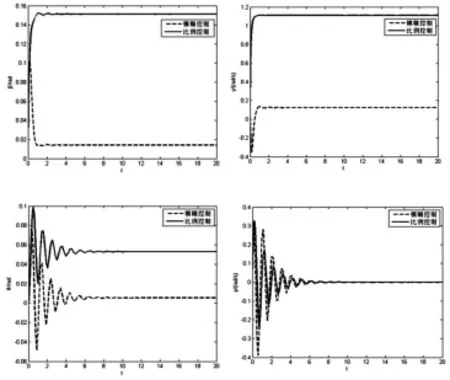
图8 δf=0.5rad,V=15m/s反馈控制与模糊控制仿真结果Fig.8 Simulation Results of Feedback Control and Fuzzy Control While δf=0.5rad,V=15m/s
通过图7、图8所示的对比仿真结果可以看出:在δf=0.1rad,V=15m/s的工况下,模糊控制器得到的β稳定值在(0~-0.005)之间,γ 稳定值在(0.15~0.2)之间,γ稳定值在(0.015~0.02)之间。而反馈控制器的β稳定值则在(-0.015~-0.02)之间,γ稳定值在0.2至0.25之间,φ稳定值在(0.02~0.025)之间。模糊控制器得到的p值的最大值以及震荡幅度均小于反馈控制器。在δf=0.5rad,V=15m/s的工况下,模糊控制器得到的β稳定值在(0~0.02)之间,γ稳定值在(0~0.2)之间,φ 稳定值在(0~0.02)之间。而反馈控制器的 β 稳定值则在(0.14~0.16)之间,γ 稳定值在(1~1.2)之间,φ 稳定值在(0.04~0.06)之间。模糊控制器得到的p值的最大值以及震荡幅度均小于反馈控制器。由图5~图8分析可知,当车辆在多种工况下行驶转向时,四轮转向车辆的质心侧偏角,横摆角速度,侧倾角,侧倾角速度的结果在整体上比基于其他两种控制方法的四轮转向车辆控制器的结果有大幅度提升。至此,得以证明所建立的四轮转向车辆转向控制模型能够有效地提高车辆中高速转向时的操纵稳定性。
5 结论
为了能够更加有效地提高四轮转向车辆的操纵稳定性,进行了以下工作与创新:(1)不同于以往的二自由度车辆动力学模型,将车辆的侧倾运动融入模型中,建立了四轮转向车辆三自由度动力学模型。(2)结合前后轮转角的非线性关系,以及车速对后轮转角大小的影响,建立了以模糊控制理论为基础、以前轮转角和车速作为控制器输入的后轮转角模糊控制器。(3)运用Matlab/Simulink软件,将所建立的四轮转向车辆转向控制器与基于比例控制、反馈控制的四轮转向车辆进行了对比仿真,并总结分析了所建立控制模型的有效性。通过上述对比仿真分析,可以得出以下结论:与基于比例控制、反馈控制的四轮转向车辆相比,所建立的四轮转向车辆转向控制器能够有效地缩短车辆到达稳定状态的时间;四轮转向车辆的质心侧偏角、横摆角速度、侧倾角的稳态值以及瞬态变化值均有所减小。从而得以证明基于模糊控制理论所建立的四轮转向车辆转向控制模型能够有效地提高车辆中高速转向时的操纵稳定性,因此也能在一定程度上减少驾驶员的驾驶负担、减少侧滑甩尾等事故发生的概率,提高车辆的主动安全性。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
小学生学习指导·爆笑校园(2019年6期)2019-09-10
解放军健康(2017年5期)2017-08-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
红蜻蜓·低年级(2015年11期)2016-02-02
西北工业大学学报(2015年1期)2016-01-19