
数字信道化接收机中相位编码信号的识别方法研究
2020-06-23 08:55翟羽佳陈文静
舰船电子对抗 2020年2期
翟羽佳,陈文静,李 琳
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
0 引 言
雷达是现代战争中非常重要并且被大量装备的一种电磁频谱设备,现代化雷达通常使用脉内调制技术来获得低截获概率和提高抗干扰能力,常用的脉内调制方法有线性调频(LFM)、非线性调频(NLFM)、相位编码(PSK)、频率编码(FSK)等。在雷达信号侦察领域中,检测并识别出相位编码信号对于识别雷达类型具有十分重要的作用[1]。目前对相位编码信号的识别和分析大多是在信号处理机中进行的,如果能在接收机中完成对相位编码信号的识别,必然会提高系统的整体反应速度。因此,对相位编码信号识别方法的研究一直以来都是电子战(EW)接收机从业人员的重点研究方向之一。
电子战接收机中,目前较为常见的处理相位编码信号的方法大多是在高速采样芯片之后对采样信号进行处理,运用平方法、相关检测、短时傅里叶变换、小波变换等[25]对相位编码信号的时域特征和频域特征进行分析,以达到检测和识别的目的。而在数字信道化接收机系统中,对信号的检测通常是在对采样信号进行信道化处理之后进行的,因此如果直接应用上述方法在信道化处理模块之前对相位编码信号进行识别,必然会造成器件资源使用的浪费;相反,如果能够在信道化处理模块之后对相位编码信号进行识别,则不仅节约了器件的资源消耗量,同时由于信道化处理模块提高了信号的信噪比(SNR),其检测灵敏度也得到了提高。
随着相位编码信号在新体制雷达中越来越多的应用,数字信道化接收机在雷达信号侦察领域不断发展壮大的同时也面临着更严峻的考验。研究一种适合在数字信道化接收机中对相位编码信号进行识别的方法显得尤为重要。
本文所提出的数字信道化接收机中相位编码信号的识别方法,其工作流程是首先对采样信号进行数字信道化处理,并对信道化模块输出的正交(IQ)数据进行幅度值和相位值计算,然后对幅度值和相位差值(由相位值做前向差分所得)进行中值滤波,再进一步求得归一化的幅度跳变值和相位差跳变值,接着对归一化的幅度跳变值和相位差跳变值进行互相关运算,最后对互相关运算的结果进行信号检测,可以检测出相位编码信号的相位跳变点,从而得到检测结果。其流程图如图1所示。

图1 数字信道化接收机中相位编码信号的识别方法流程图
1 相位编码信号特征
根据相位变化的不同,相位调制一般可以分为“二进制相移键控(BPSK)”和“正交相移键控(QPSK)”以及“多相移键控(MPSK)”等。由于BPSK在雷达应用中更为广泛[1],因此,本文以BPSK 信号为例,进行分析和研究。
相位编码信号经数字接收机高速采样后形成一系列离散采样点,其表达式如下所示:

式中:A为信号幅度;f0为载波频率;n为离散采样点;φ(n)为相位编码函数;φ0为初始相位值。
对于BPSK信号而言,相位的变化为π,因此φ(n)取值为0 或者π。其部分波形和频谱如图2所示。

图2 BPSK 信号部分波形和频谱
从图2(a)可以看出,BPSK 信号的采样波形存在明显的相位跳变点,但是要检测出这些相位跳变点则需要进行大量复杂的运算,消耗大量的器件资源,不利于在现场可编程门阵列(FPGA)中进行工程实现。从图2(b)可以看出,BPSK信号的频谱与普通脉冲信号的频谱存在明显的区别,对待测信号的频域特征进行分析可以判断出该信号是否为相位编码信号,但是仅从频域进行分析无法测量出BPSK 信号的码元时间,也不能确定信号具体的编码类型。
采样信号经过数字信道化处理之后,所得输出为正交(IQ)数据,利用坐标旋转数字计算(CORDIC)方法对IQ 数据进行处理可以求出各子信道的幅度值和相位值。由于数字信道化可以看成一个数字滤波器组,各个滤波器具有相同的特性和带宽[6],因此只需对某一个子信道进行分析即可。数字信道化接收机中,各子信道的幅度值和相位值通常是对信号进行检测识别的基础。因为幅度值几乎不受其它参数的影响,所以在对普通脉冲信号和连续波信号进行检测时只需基于各子信道的幅度值进行时域检测;对线性调频信号进行检测时则需要同时基于幅度值和相位值;但是对于BPSK 信号而言,由于受相位调制的影响,在相位跳变点的相应位置其子信道幅度值和相位差值同样存在跳变点,不能直接用于信号检测,其波形如图3所示。
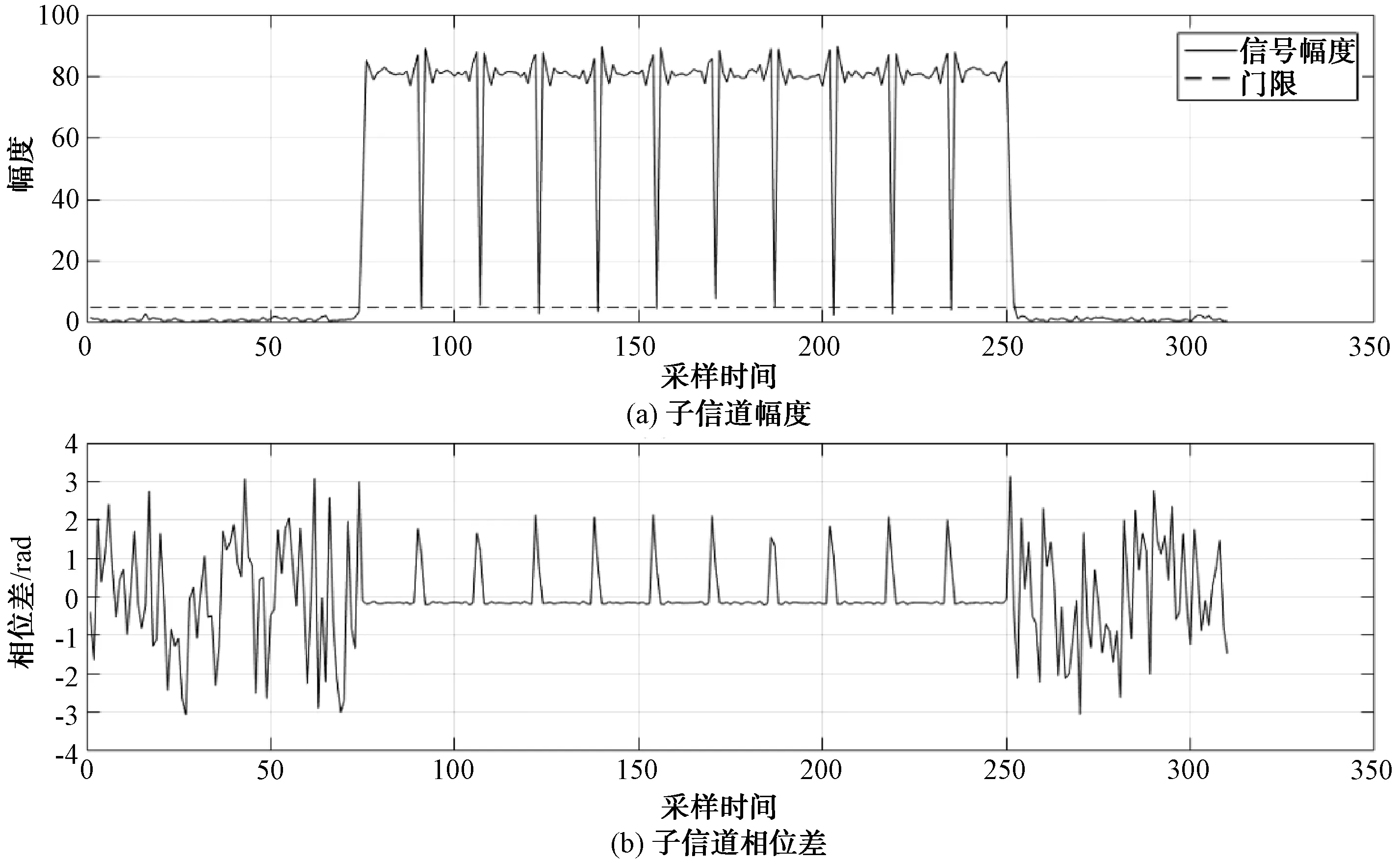
图3 信道化之后的BPSK 信号
由图3(a)可知,很难找到一个合适的门限值来对BPSK 信号的子信道幅度值进行检测,门限值选取过小,可能会造成虚警率提高;门限值选取过大,则又可能造成脉冲分裂。图3(b)所示的相位差值同样不能直接用于测量载波频率,否则会产生很多的虚假频率值。因此,必须先对各子信道幅度值和相位差值进行滤波处理,降低相位跳变及脉冲噪声对信号幅度值和相位差值的影响。
2 中值滤波
对普通脉冲信号、连续波信号和线性调频信号而言,子信道幅度值的最大干扰来源是高斯白噪声,因此最常使用的滤波方法是均值滤波法,这种滤波方法平滑度高,算法简单,便于工程实现,经常被应用于各种数字信道化接收机设计中。但是对于BPSK 信号,幅度值跳变点和相位差值跳变点对各自波形的影响更加明显,这种影响与脉冲噪声类似,而且均值滤波无法有效去除这一影响。针对这种特性,本文选择用中值滤波法对各子信道幅度值和相位差值进行滤波处理。
中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号平滑处理技术[7],其原理是把数字序列中某一点的值用该点的一个邻域中各点值的中值代替。中值滤波常应用于数字图像处理中,对脉冲噪声有很好的抑制作用,同时能够较好地保留原始像素点的边缘信息[7],这些特性使得中值滤波在雷达信号侦察领域中同样可以发挥很大作用。
中值滤波的数学定义如下所示:

窗口宽度L=2m+1。对于单次中值滤波而言,以最常用的冒泡排序法为例,其时间复杂度为O(L2)。当窗口宽度L的取值变大时,中值滤波的时间复杂度迅速变大,因此必须对窗口宽度进行限制,否则中值滤波算法的工程实现会相当困难;但是如果窗口宽度过小,滤波的效果也会变差许多。通常情况下,对窗口宽度的选择会在时间复杂度和滤波效果之间做一个折衷。
如果相邻2次中值滤波窗口中的数据存在相关性,则可以利用前次排序所得的有序序列进行二分查找算法和内插操作,得到后次的中值,大大提高运算效率[8]。本文所采用的中值滤波法为滑动中值滤波,即对于t0时刻,窗口中的数据为:x(n-m),x(n-m+1),…,x(n),x(n+1),…,x(n+m)。对于t1时刻,窗口中的数据为:x(n-m+1),…,x(n),x(n+1),…,x(n+m),x(n+m+1)。
此时,窗口中的数据只有一个发生了变化,根据文献[8]所述,没有必要对所有数据重新进行比较排序,只需在t0时刻排序结果的基础上,丢掉数据x(n-m),再利用二分查找法寻找数据x(n+m+1)的合适的插入点即可,本次排序的时间复杂度降低为O(log2L)。
由于后续的每个时刻都是对t1时刻的重复,因此当对子信道幅度值采用流水线形式进行滑动中值滤波时,其平均时间复杂度近似为O(log2L)。

图4 滑动中值滤波处理前后幅度值、相位差对比
图4所示为经过滑动中值滤波处理前后的子信道幅度值和相位差的对比。由图4(b)可知,对使用滑动中值滤波后的幅度值进行信号检测可以很容易地检测出BPSK 信号的脉冲前后沿,从而确定其脉冲包络;再根据脉冲包络在图4(d)中确定相位差取值位置,则由相位差所计算出的载波频率能够满足测量要求。
3 互相关
根据滑动中值滤波处理前后的幅度值和相位差值分别求各子信道的幅度跳变值和相位差跳变值,并进行归一化处理,再利用脉冲包络滤除噪声部分的幅度跳变值和相位差跳变值。数字信道化接收机的输入信噪比为0 dB时,所得幅度跳变值和相位差跳变值如图5所示。
数字信道化接收机输入信噪比为-3 dB时,所得幅度跳变值和相位差跳变值如图6所示。
由图5(a)和5(b)所示的幅度跳变值和相位差跳变值可知,信道化处理模块输出端信号的信噪比比输入端信号的信噪比有了相当大的提高,因此当数字信道化接收机的输入信噪比较大时,可以直接对幅度跳变值或相位差跳变值进行检测,但是如图6(a)和6(b)所示,当输入信噪较小时直接检测可能会造成码元时间测量错误。本文对归一化后的幅度跳变值和相位差跳变值进行互相关运算,以进一步提高检测信号的信噪比。
互相关运算的离散形式如下所示:

式中:x(n)和y(n)分别代表归一化后的幅度跳变值和相位差跳变值,m从0到N-1变化。

图5 输入信噪比为0 dB时的幅度跳变值和相位差跳变值
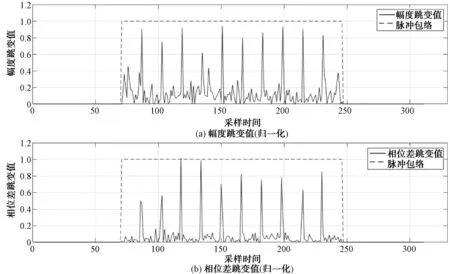
图6 输入信噪比为-3 dB时的幅度跳变值和相位差跳变值
对输入信噪比为-3 d B 时的幅度跳变值和相位差跳变值进行互相关运算,其结果如图7所示,此时使用1个固定门限值就可以检测出相位编码信号的相位跳变点。
检测出相位跳变点之后,结合系统时钟频率,可以计算出码元时间t c。由于脉冲包络已经被检测出来,则脉冲宽度可以确定为T,因此相位编码长度为:

将检测出的相位跳变点以及相位编码长度与已知相位编码类型进行比对,则可以确定所测信号的编码类型。
4 仿真验证
本文通过计算机进行仿真,当数字信道化接收机输入信噪比分别为30 dB、20 d B、10 dB、0 d B、-3 dB和-10 dB时,数字信道化接收机对相位编码信号的检测结果如图8所示。
由图8 可以直观地看到,当输入信噪比降至-3 d B时,数字信道化接收机对相位编码信号的检测结果开始变差;当输入信噪比降至-10 dB时,数字信道化接收机对相位编码信号的检测结果出现大量错误。

图7 互相关运算结果

图8 不同输入信噪比下对相位编码信号的检测结果
由于检测结果难以进行准确的计算,因此本文多次重复上述仿真,将所测得的码元时间和载波频率进行了统计,其测量误差如表1所示。

表1 码元时间误差和载波频率误差统计
统计结果与图8所示的检测结果高度一致,这表明本方法受数字信道化接收机输入信号的信噪比影响较大,当输入信噪比大于0 d B 时,检测结果较好;当输入信噪比降至-3 dB 时,测量误差已经开始明显变大;当输入信噪比达到-10 dB时,已经无法正确检测出相位跳变点,同时载波频率测量误差也达到1 MHz以上。
5 结束语
本文分析了相位编码信号的特征,利用滑动中值滤波的特性对信道化处理之后的各子信道幅度值和相位差值进行滤波,以此为基础计算出各子信道的幅度跳变值和相位差跳变值,并进行互相关运算以提高待测信号的信噪比,从而检测出信号的相位跳变点,最终完成对信号参数的测量和编码类型的识别。本方法的优点在于充分利用信道化处理模块提高了待测信号的信噪比,检测灵敏度较高,同时运算复杂程度低且易于工程实现。仿真结果表明,当数字信道化接收机输入信噪比大于0 dB时,本方法测试结果较好,在雷达信号侦察领域有一定的应用价值。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
现代仪器与医疗(2022年1期)2022-04-19
导航定位学报(2022年1期)2022-02-17
北京理工大学学报(2021年12期)2022-01-13
股市动态分析(2021年25期)2021-12-30
北京理工大学学报(2021年8期)2021-09-14
中国电气工程学报(2019年18期)2019-10-21
汽车与安全(2019年11期)2019-06-01
股市动态分析(2014年27期)2014-07-29
