一款基于CAN总线的方向盘转角传感器的设计
2020-06-29 06:07温伟
汽车电器 2020年6期
温 伟
(山西中航锦恒科技有限公司,山西 太原 030032)
随着汽车电控技术飞速发展,以及人们对汽车驾驶方面的舒适、稳定、安全等要求的提高,车身电子稳定系统(Electronic Stability Program,ESP)和电动助力转向系统(Electronic Power Steering,EPS)成为汽车的标配,转角传感器作为系统的重要组成部分,一般安装在方向盘下部,提供方向盘角度位置和角度变化率,作为ESP和EPS控制单元动作的依据之一。转角传感器主要分为接触和非接触式两类,非接触类中有磁电式转角传感具有精度高、抗干扰性强、结构简单等优点,该款转角传感器选择巨磁阻传感器方式来实现。
1 工作原理及系统结构
由于一个GMR传感器仅能在360°范围内进行测量,无论对商用车还是乘用车来说,都无法满足方向盘转动角度的测量。为解决测量量程的问题,采用两片传感器芯片90齿主动大齿轮A,以及两个齿数不相同的从动小齿轮B和C,分别为30齿和26齿,可测量角度范围为±780°。
转角传感器由上壳体、下壳体、主动大齿轮、两个从动小齿轮、两片磁钢、箍环、PCB板组成。主动大齿轮分别和两个从动小齿轮啮合,从动小齿轮中心固定两片径向充磁的圆柱形磁铁,磁铁正上方是固定在线路板上的两片巨磁阻传感器;3个齿轮由箍环固定,使3个齿轮组成一个整体,可有效减小零件间的间隙导致的测量误差。
转角传感器一般和时钟弹簧一起安装在方向盘转角管柱上,当方向盘转动时,由时钟弹簧拨动主动大齿轮A,大齿轮A带动两个从动的小齿轮B和C转动,两个从动小齿轮中间安装的径向充磁的磁钢,随着从动小齿轮B和C转动,磁钢周围的磁场方向发生变化,通过磁钢正上方的两个GMR传感器将磁场变化转换为数字量信号,MCU通过SPI接口读取信号,读取flash中存储的标定数据,通过标定数据和读取到的tle5012B数据计算出两个从动小齿轮的角度信息,通过算法计算出方向盘的绝对位置转角,结合使用之前所置的0位,得到当前方向盘转过的角度和方向,通过CAN总线发送到ECU。传感器结构如图1所示。

图1 传感器结构图
2 传感器硬件设计
硬件平台框图如图2所示。

图2 硬件平台框图
2.1 传感器模块
选用汽车级应用的高精度角度测量芯片TLE5012B,用来感应从动小齿轮转动时磁场强度的变化,并转为数字信号输出给MCU,如图3所示。

图3 传感器模块
TLE5012B集成了2个GMR全桥,2个GMR-ADC单元,1个温度传感器,1个DSP单元,数据更新率可达43μs,磁场感应范围30~50mT,温度范围-40~150℃,1个SPI通信接口,16bit精度正余弦,数字传输接口可有效地提高抗干扰度。图4为TLE5012B内部框图。
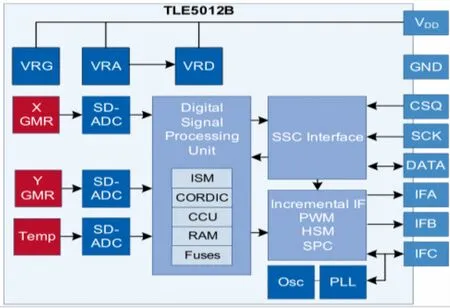
图4 TLE5012B内部框图
2.2 MCU模块
微控制单元选择Microchip公司生产的28脚封装的8位低功耗高性能单片机PIC18F25K83,可用于工业和汽车应用。
芯片自带的时钟模块可提供最高64MHz的工作频率,32KB flash程序存储空间、2KB SRAM、1KB EEPROM,包含丰富的外设接口 (CAN、SPI、I2C、UARTs、LIN、DMX等通信外设,4路12bit AD,4路10bit PWM等)。工作温度范围-40~125℃。
2.3 电源模块
MCU、GMR传感器及CAN芯片所需5V工作电压由电源芯片TLE42694提供。原理图如图5所示。
输入电压-42~45V,输出电压5V±2%,最大输出电流150mA,具有温度保护、反接保护、输出限制等特性,工作温度范围-40~125℃。
2.4 CAN通信及调试模块
控制单元内置CAN控制器,总线数据的封装、读取发送由控制器完成,与总线上连接需外接CAN总线收发器,选用TLE6250G。CAN通信接口电路图如图6所示,调试接口电路图如图7所示。
3 传感器软件设计
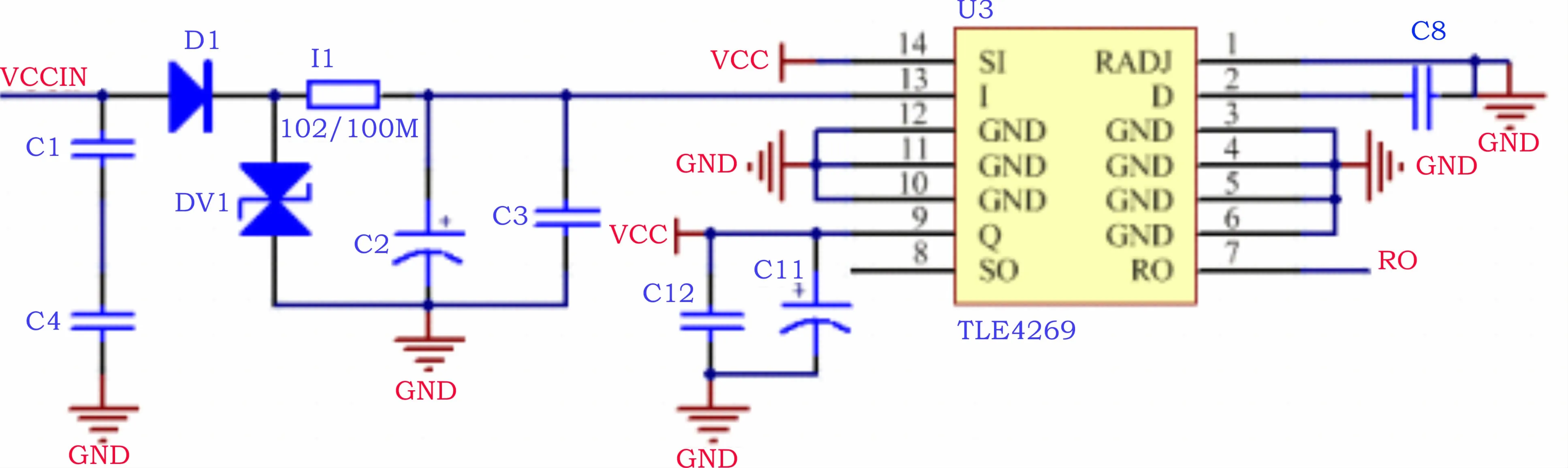
图5 原理图
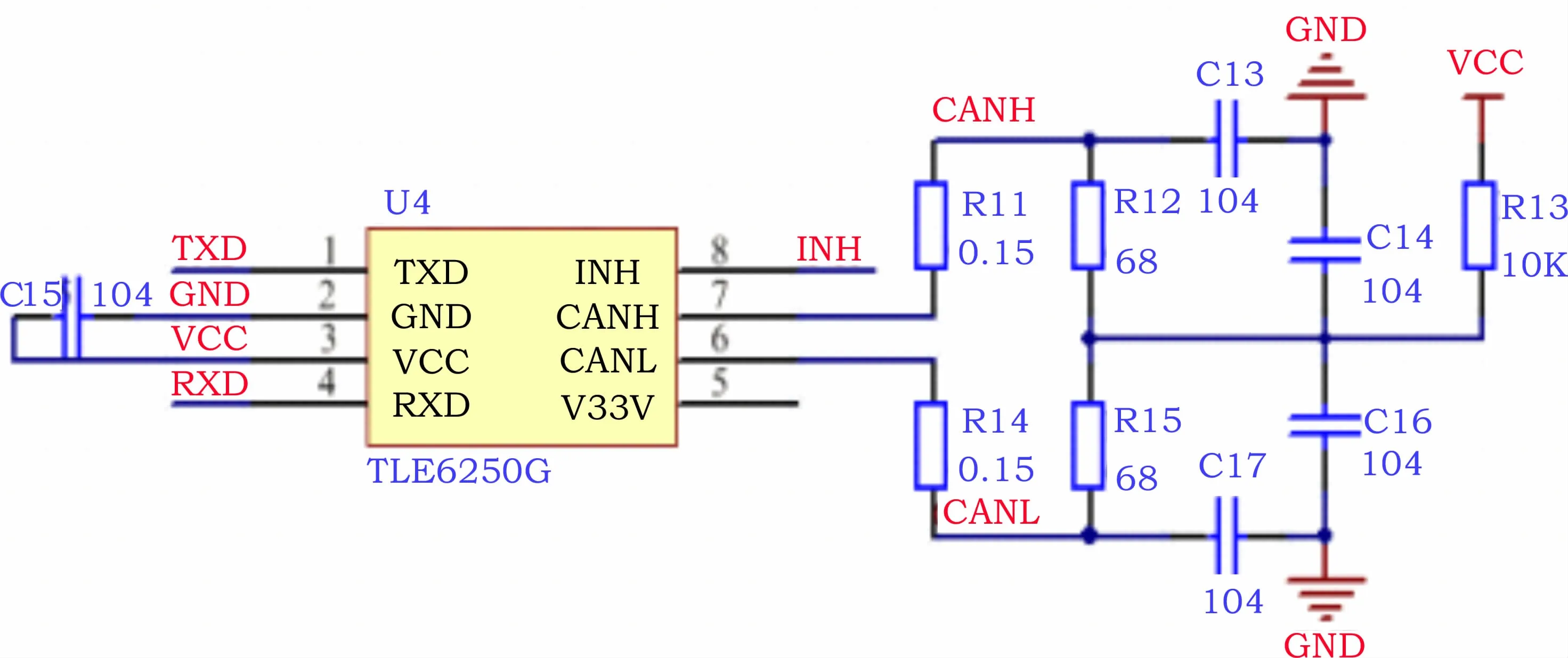
图6 CAN通信接口电路图
将齿轮的转动转化为方向盘转动的角度和角速度,需要通过软件来实现。转角传感器软件主要由传感器数据采集单元、绝对角度计算单元、标定计算单元、零位处理单元、数据处理及通信单元、诊断单元这几部分构成。其中各单元的数据传递都需要诊断单元的配合,以保证数据传输的准确性。最后处理过的数据经过通信单元按照约定好的数据协议和整车进行数据通信,以实现转角传感器的功能。软件总流程如图8所示。
当主动齿轮转动时,两个从动齿轮的转动位置满足图9上的位置关系,-780°到0的范围内差值唯一,0到780°范围内的差值唯一,但两个区域范围直线相位相差180°,通过固定差值和相位差180°,计算出主动齿轮的转动角度和角速度θ=f(α,β)。

图7 调试接口电路图
4 系统测试结果
测试软件如图10所示。所有测试围绕转角传感器主要参数指标进行,具体参数指标如图11所示。

图8 软件总流程

图9 大齿轮输出角度与小齿轮角度之间关系曲线
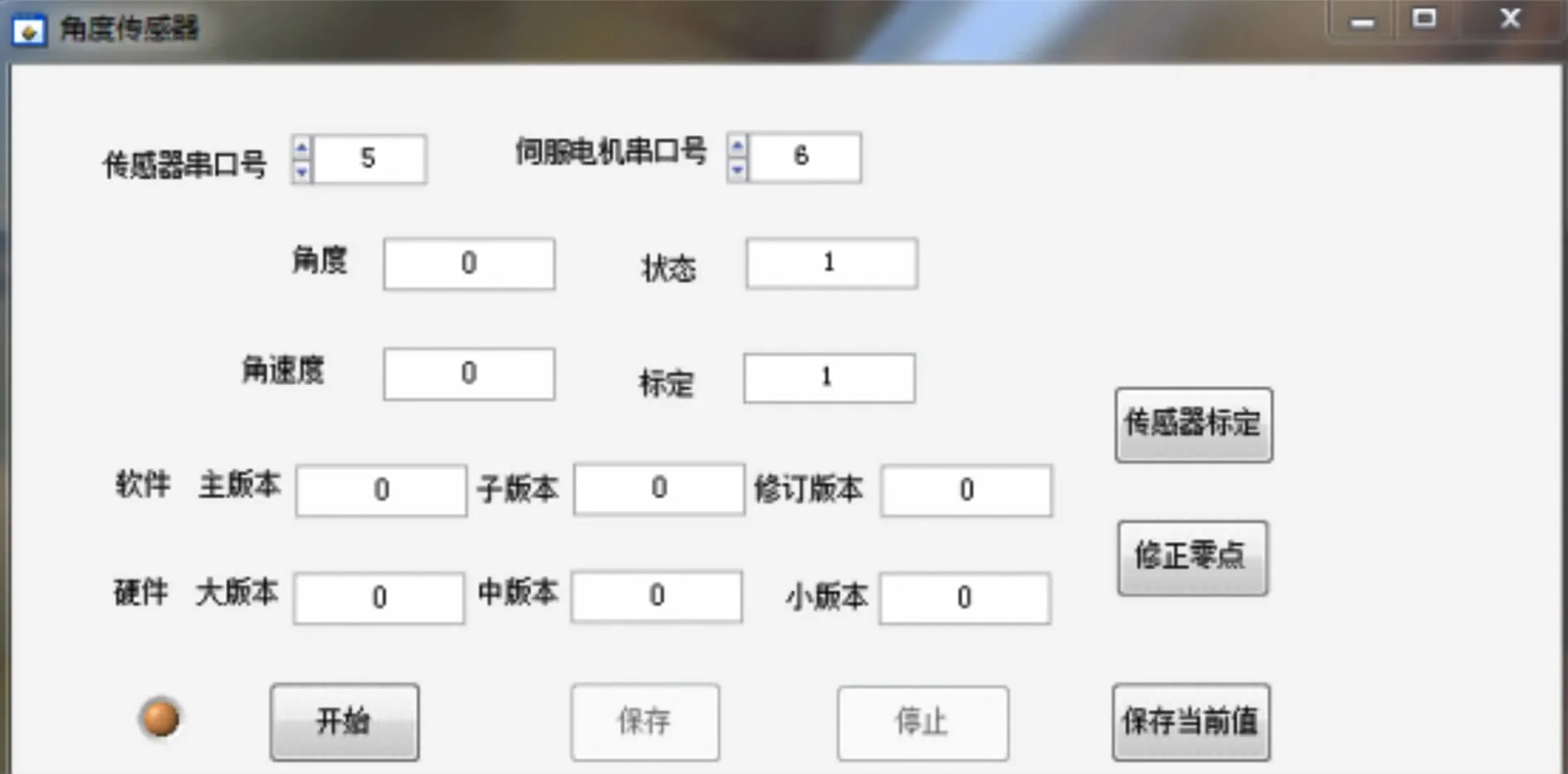
图10 测试软件
任何传感器由于设计、元器件选型、生产制造等因素的影响,都存在一定的误差,对本传感器主要进行角度精度、角速度精度、非线性误差、迟滞误差、零位变化的测试,测试结果如图12~图15所示。

图11 主要参数指标

图12 角度误差分析图
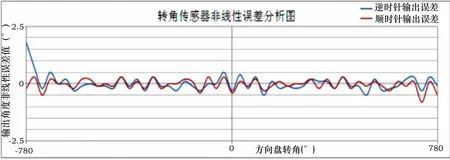
图13 非线性误差分析图
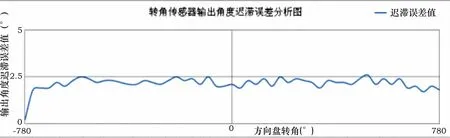
图14 迟滞误差分析图

图15 角速度误差分析图
5 结束语
通过机械结构、软硬件的实现、测试结果的分析,该传感器可为不同部件提供准确的角度、角速度信息,并且具有结构简单、可靠性高及精度高的优点,可在各类车型上广泛推广应用。
猜你喜欢
数学大王·趣味逻辑(2022年3期)2022-03-17
科学家(2021年24期)2021-04-25
初中生学习指导·中考版(2020年10期)2020-09-10
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
中学生数理化·中考版(2017年4期)2017-07-08
青年时代(2016年30期)2017-01-20
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05