浅谈有缆遥控机器人在水利工程检测中的应用
2020-06-30 08:16
四川水利 2020年3期
(四川水利职业技术学院,四川 崇州,611230)
随着科学技术的不断发展,在水利工程检测中使用水下机器人这种新的检测方式,有助于提升检测工作的效率,得到真实、准确、可靠的检测结果。水下机器人设备的使用,可以帮助地下检测工作取得好的检测效果,能对水下结构的运行状况和存在的病险隐患等问题进行直观性地反映,有利于技术人员掌握水利工程目前的运行状况,了解水利工程运行过程中存在的问题。
1 水下机器人技术概述
1.1 水下机器人系统简介
水下机器人也称作潜水器(Underwater Vehicle),可分为无人潜水器(Unmanned Underwater Vehicle)和载人潜水器(Human Operated Vehicle),无人潜水器又分为有缆遥控机器人(Remote Operated Vehicle,简称ROV)和自治水下机器人(Autonomous Underwater Vehicle,简称AUV),在水利工程检测过程中应用最多最广的是ROV。ROV的基本工作原理是由岸边的人员通过连接潜水器的脐带,提供动力来操纵潜水器,通过声纳等专用设备进行水下作业。目前的ROV主要是由ROV主机、绞盘及控制管理系统和控制平台3个部分组成。ROV的作用是通过高清的摄像头和二维图像,了解水下运动的状态。ROV包含了二维多波束图像声纳、位置及水深传感器等探测传感器的水下运动平台。现如今第3代水下机器人设备,比如加拿大生产的Stealth 3 ROV为球形结构,结构紧凑,大小适中;推进器采用直流无刷推进器,能满足水深200m的水下作业;还配备了专业的操作手柄,帮助工作人员精准地确定水下机器人的位置。
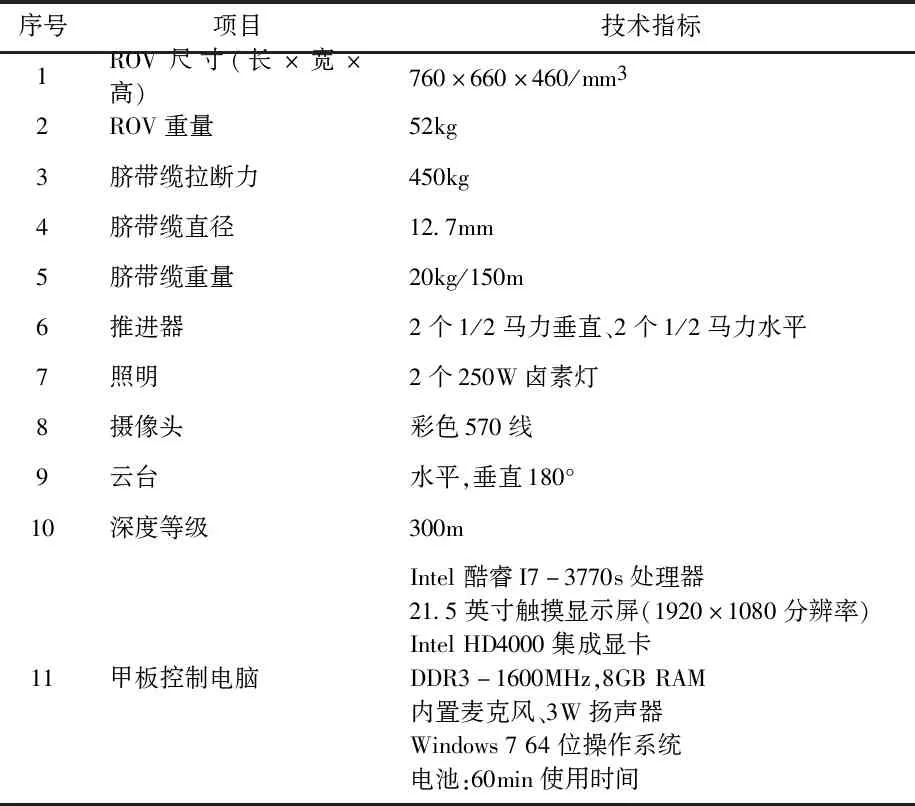
表1 Stealth 3 ROV水下机器人主要技术指标
1.2 ROV系统的技术特点
结合水下机器人对水利工程进行水下检测的实际情况,总结ROV系统的技术特点如下。
1.2.1灵活性
ROV在实际操作的过程中,根据必要的指令,随意调动检测的位置和方位,通过自身携带的传感器和定位装置进行水下作业。另外ROV本身所下潜的深度,最大可达到300m,满足水下检测工作的开展。
1.2.2 高效性
潜水员在深水作业中需要进行必要的潜水,而且由于加压时间长,潜水员在水中工作的时间和条件都有所限制,不能够及时地对水下情况进行勘测。运用了ROV可以安排必要的指令,极大地缩短了工作时间,同时还提升了工作的效率。
1.2.3 直观性
ROV的运用,可以通过多方位、多角度,直观性地观测水下的实况,结合ROV所搭载的摄像头等多种设备,长时间在水中任意深度下进行作业,工作人员能够结合指令快速地在指定地点开展工作,实时地观测水下的状况,通过信息图像的储存来进行控制平台的操作。在水体环境不复杂的情况下,ROV的运用可以清晰地了解水下的状况,例如水库大坝的裂痕,钢筋的腐锈等情况通过ROV进行及时的定位追踪。水体水质相对复杂的环境或者相对较差的环境下,可以通过二维多波束图像声纳来对检测目标进行具体的勘测。
ROV在水利工程检测的过程中具备以上的优势,但仍然存在一定的局限性。例如在水流快速和水体较为复杂的环境下,无法进行准确的检测。若水下存在鱼网或者线缆等,有可能会使其缠绕至螺旋桨中,脐带很容易被缠绕或者损伤造成机器设备故障。另外,水体较为浑浊,高清摄像头不能检测,仅仅只能用声纳来形成范围较广的图像。
2 ROV在水利工程应用中的关键技术
ROV本身具备供电系统、导航系统、通讯系统、控制系统等多个系统。ROV在水利工程中应用的关键技术包括以下几个方面。
2.1 负载和水流扰动下的运动控制
对水利工程进行检测作业时,ROV需要携带必要的定位设备和具体的勘测设备。负载的增加会使机器人自身的重量发生变化。水下作业时大坝水流可以引起必要的扰动,ROV的动力学本质是线性的,结合水下操作的自由度进行耦合性地使用,但是由于水利工程和水体自身的复杂性,在ROV运动控制的过程中,存在模糊和不确定难以预测的干扰性问题。因此,需要结合模糊控制、神经网络控制等多种控制方法,实现操作人员对于ROV的辅助操作,更精准地了解检测过程,通过必要的控制算法,有针对性地进行ROV的运用。ROV在水利工程检测过程中,系统可以在流速不大于1m/s的水流环境下使用。
2.2 缺陷识别
ROV在水利工程检测的过程中,最关键的技术莫过于缺陷目标识别。由于水下的环境较为复杂,给水下作业和具体的勘测带来了困境,尤其是在复杂浑浊的水体环境中进行勘测时,所使用的常用检测手法,就是摄影配合光源照明或近距离高清观摩。因此,可以采用声纳技术对结构外部轮廓、结构破损情况和水库是否存在淤积问题进行及时勘查,最大工作深度可以达到300m,同时也可以在ROV运用过程中,采用水下超声测厚仪通过金属性材料,进行及时的勘测。
2.3 缺陷定位
水下工程较为复杂,水利工程规模较大,不仅存在识别缺陷,还需要及时地检测出水下作业中缺陷的位置,解决水下作业的处理。因此,ROV在实施过程中需要具备精准性的导航,由于ROV的非线性动力运动原理,可以有助于实现长时间和大范围的精确定位,目前的水下定位可以结合声学定位、行位推算等多种方式,来满足ROV在水利工程中的检测需求。通过多种定位系统的重组,有助于ROV精准性定位,虽然说目前国内水下定位可以在水深45m左右下进行,但是为了减少测量误差,还是需要不断地完善ROV自身的控制技术和导航技术。
3 ROV技术在水利工程检测中的应用
3.1 大坝渗漏点检测
现如今,大部分国内的大坝是以钢筋混凝土材料进行修建的,因此,大坝库区一般是处于清水环境,可以采用ROV系统进行具体的检测。检测工作开展时,可以分区域的来排查大坝库区中存在的缺陷部位,通过实际水下检测的检测报告,结合二维多波束声纳图像和高清图像进行大坝渗透点的排查,做好水下巡视工作,充分发挥ROV的作用,有助于完善水利工程检测中对于大坝周边缺陷性的检测。ROV的操作安全性较高,而且效率也高,工作时间也没有具体的限制。
3.2 水闸底板缺陷检测
水利工程设施中水闸是由闸室和上下游段等组成的,在闸室的重量传递过程中,容易造成防渗和防冲。因此,在水利工程检测过程中采用ROV检测,可以对水闸具体的设计和维修状况进行及时的分析。在ROV的工作运行中及时了解现场实际操作时的状况,可以通过地下环境的勘测,及时地关闭闸门,有效地降低水质浑浊度,提高具体工作的效率。一般有缆遥控机器人会布置在沿建筑物纵轴线方向的横剖面测线,进行图像的采集和定位,对于水下状况进行及时的勘查。
3.3 水下金属结构物锈蚀检测
大坝水下检测过程中,对于其进水口水下部分的检测,相对来说较难。因为在大坝水流过程中水流的流速较快,潜水员在水下工作勘探的过程中,由于水压过高无法进行检查工作。另外,大坝水下的进水口部分结构较为复杂,混乱的水流中难以进行准确的勘测,因此,使用ROV系统可以结合矢量推进系统,实现对进水口处金属结构的数据采集,有效地对大坝的水质环境和水质问题进行及时地勘查。
3.4 水利枢纽导流底孔封堵检修门槽检测
有缆遥控机器人从大坝上游门槽入水,依靠水下声纳扫测系统进行辨别和定位,能很好地将水下检修门槽形状结构和位置清晰地扫测出来。从远处,能够捕捉到大坝及检修门的图像,在图像上能够指示ROV的运动方向;在近处,水下摄像系统能更好地拍摄到水下画面来指示ROV运动。若遇底层为泥沙易搅浑,一种方法是快速推进将泥沙冲走,等静止后再作业;另一种方法是慢慢推进,尽量不搅浑泥沙,待ROV着底后靠机械手作业,并且轻拿轻放。水下清理的难点是对狭窄槽隙内塞紧枕木的清理。检修门倒钩槽平面尺寸为30cm×15cm(左右方向×上下游方向),倒钩槽面向上游开口宽度只有15cm,槽内有枕木被检修门压紧后卡死,ROV将机械手伸到槽内将枕木捏碎后再往外掏,最终清理出所有枕木。如果可以安装一刮板,还可以刮除槽内底部的泥沙。
3.5 水下混凝土止水和面板的检测
有缆遥控机器人系统的核心检测为摄录照明系统,另外可搭载二维声纳成像系统,以实现对水下结构形状及周边地貌的简单测量。有缆遥控机器人可以对水下分缝止水和面板进行检测,查看面板表面有无明显的贯穿性裂缝和大面积明显的混凝土缺失等;各条橡胶止水是否基本完整,有无局部表面开裂、固定螺母缺失情况等。
4 结语
水利工程水下勘测过程中,由于水域的复杂性和自身环境的特点,会使用有缆遥控机器人系统进行辅助观测,可以高效地对水利工程进行检测,了解水利工程的运行状况和完好情况。有缆遥控机器人系统的安全性较高,数据更为直观,有利于水利工程水下工作的勘测。
猜你喜欢
地下水(2022年5期)2022-10-19
城市勘测(2022年2期)2022-05-09
资源信息与工程(2021年5期)2022-01-15
火力与指挥控制(2021年8期)2021-09-08
建材发展导向(2021年13期)2021-07-28
考试与评价·八年级版(2020年5期)2020-10-29
百科知识(2018年6期)2018-04-03
舰船电子工程(2017年10期)2017-11-28
少儿科学周刊·少年版(2016年4期)2017-02-15