
车用永磁同步驱动电机高性能控制技术
2020-07-07 02:39白国军
汽车零部件 2020年6期
白国军
广东省珠海市质量计量监督检测所,广东珠海 519000)
0 引言
永磁同步电机矢量控制系统因其高效节能、高转矩密度、宽转速范围及良好的控制性能,已在新能源汽车领域得到广泛应用。车用特点对电机控制功能和性能提出诸多严格要求,而工业变频调速领域比较成熟的常规电机控制技术已无法满足新能源汽车的需求。因此,需要结合车用特点,研发新能源车用高端电机控制技术。本文作者针对某公司技术中心自主开发的离合器耦合式电机(Clutch Coupled Motor,CCM)系统,开发一种针对永磁同步电机的性能提升控制技术,能有效提升电机的性能输出。
1 CCM电机系统描述
整车混合动力总成系统构型主要包括2.0T-GDI发动机、离合器耦合式电机及其逆变器、7速湿式双离合变速器和锂离子动力电池,整车采用P2构型,混合度较高,具备混合动力所有的功能。图1是CCM电机外形图,图2所示为CCM电机定转子结构图,采用集中绕组形式,20极30槽配合,功率密度和扭矩密度较高,但转矩波动较大[1]。
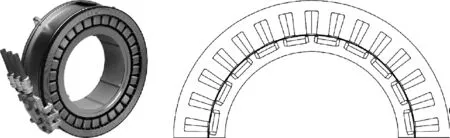
图1 CCM电机外形 图2 CCM电机定转子结构
2 最优电流控制轨迹规划
2.1 MTPA轨迹规划(动力性模式)

Te=1.5×pn×Iq×[ψf+(Ld-Lq)·Id]
(1)
∂(T*/Is)/∂Id=0
(2)
∂(T*/Is)/∂Iq=0
(3)
式中:Is为相电流。

图3 MTPA控制电流轨迹理论分析
2.2 MTR轨迹规划(舒适性模式)
在典型的车用永磁同步电机控制系统中,由于转矩波动会导致控制性能下降,引起噪声和震动,绕组损耗会降低能量利用率,这些问题是开发高可靠性和高效率的电机控制系统应该避免的。采用最小转矩波动(Minimum Torque Ripple, MTR)控制, 通过合理地分配电流矢量大小和控制角度[arctan(Id/Iq)]最小化相应的转矩波动和最低的绕组损耗,从而提高车用永磁同步电机控制性能,提高能量利用率和整车舒适性。
电机控制策略根据不同工况在MTPA和MTR控制之间进行切换,使用MTPA控制以减小损耗增加扭矩输出,使用MTR控制以减小转矩波动,如图4所示。
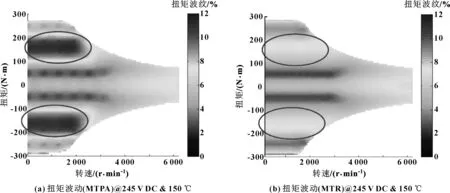
图4 采用MTPA控制与MTR控制时的转矩波动MAP
3 低速增扭控制
为了继续提升低速峰值输出扭矩,满足整车的加速性能需求,在使用MTPA控制方法的同时,本文作者提出一种Torque Boost扭矩提升控制方法。由于受到IGBT模块耐电流能力Iigbt-max-peak的限制,如果采用正弦波电流矢量控制方式,扭矩将无法继续提升。如图5—图6所示,控制电机输出峰值扭矩时,在一个电周期内,Imax只在6个位置达到了Iigbt-max-peak值,其余位置下IGBT的电流能力都没有得到充分发挥。因此,通过控制电流矢量,使Imax始终能达到Iigbt-max-peak值,即可输出理论上的最大峰值输出扭矩,使扭矩输出提升4.9%。其中:Imax=max[abs(Ia),abs(Ib),abs(Ic)]
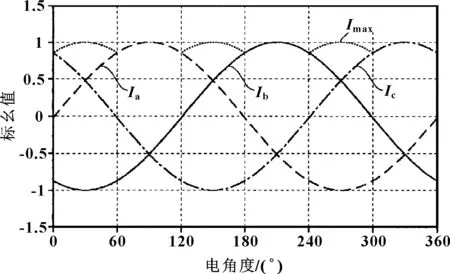
图5 电流波形与IGBT耐电流能力的关系
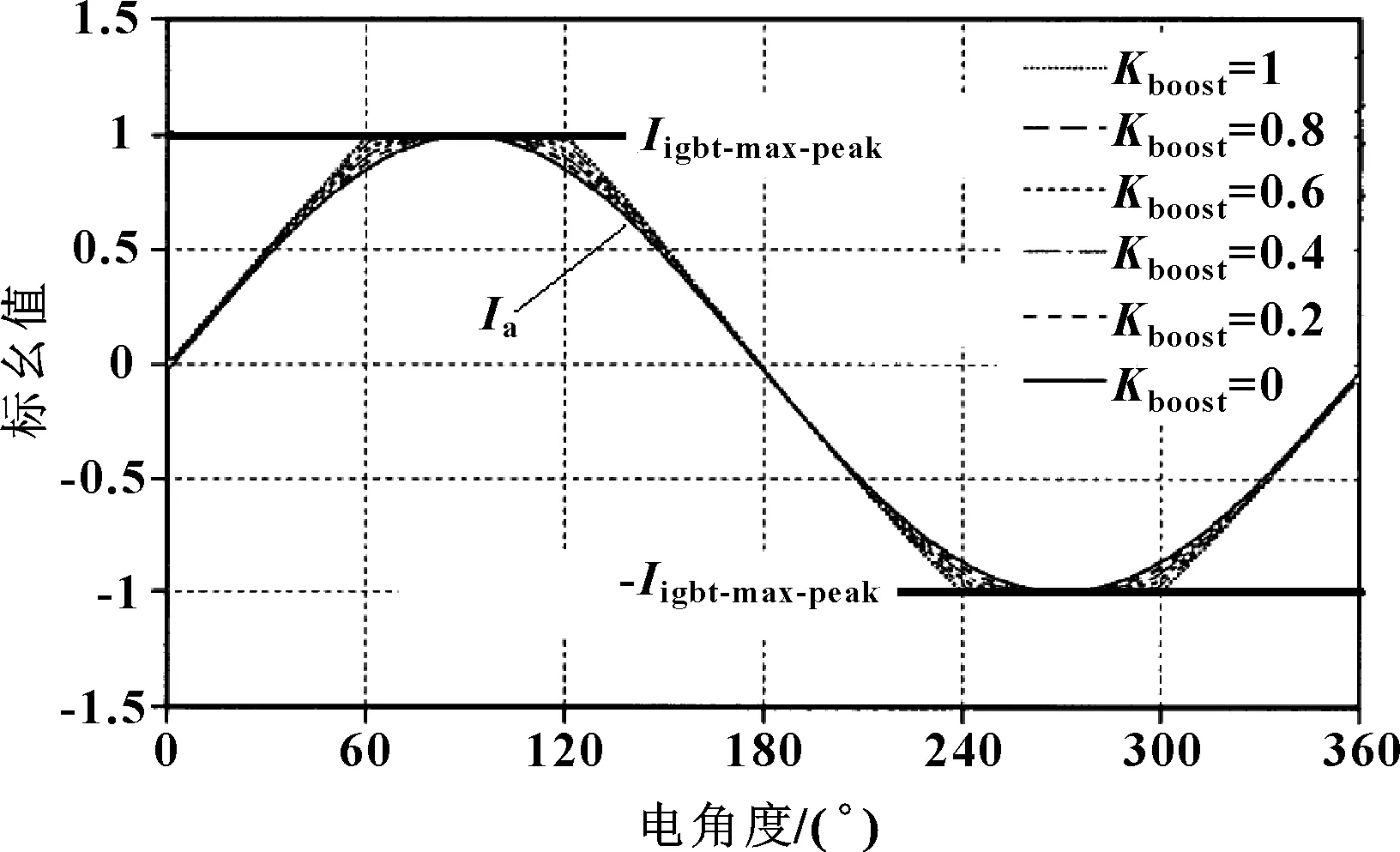
图6 电流波形与Kboost值的关系
为实现峰值扭矩输出时,Imax在电周期内所有位置都达到Iigbt-max-peak值,采用如图7所示的Torque Boost控制方法。该方法只在低速大扭矩工况下使用,以满足整车加速性要求。在小扭矩工况和高速工况时,不使用Torque Boost控制方法,采用常规正弦波电流控制,此时Kboost值为零。Torque Boost控制方法的实现原理如下:随着扭矩需求不断增大,Kboost逐渐由0变到1,逐渐由正弦波变为梯形波,以充分利用IGBT的电流能力,增大扭矩输出。
对上述算法进行台架试验验证得知,在电流指令不变的情况下逐渐提高Kboost系数,电流波形逐渐趋于梯形波而峰值保持不变,输出扭矩逐渐升高,验证了所开发功能算法的有效性[2]。
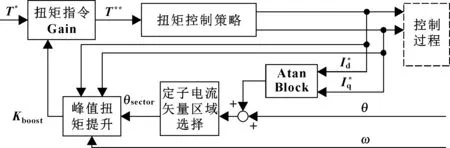
图7 Torque Boost功能框图
4 高调制率PWM策略
IPMSM高速段的恒功率特性和最高工作转速主要受限于电机相电压峰值Ur_max的限制,在母线电压Udc一定的情况下,Ur_max主要取决于所使用PWM的调制率。因此,高调制率PWM策略有助于提高电机系统的输出功率和最高转速。
4.1 常规SVPWM调制

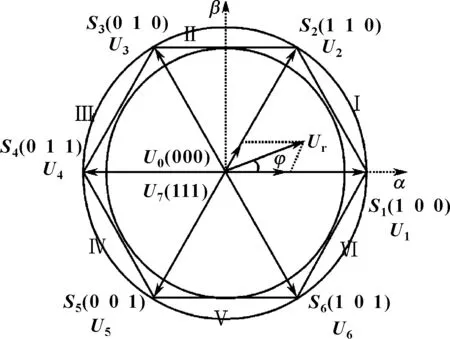
图8 基本电压矢量
4.2 六步法调制
在PMSM高速运行时,通常采用类似于直接转矩控制的电压矢量控制模式,此时的调制方式称为六步法调制。其特点是在每个调制周期只有一个非零电压矢量作用。对相电压波形进行傅里叶分析可知基波分量幅值为
所以六步法对应的调制率为0.636 6。
4.3 过调制
介于SVPWM和六步法调制之间的区域为过调制区,随着过调制率的提高,电压利用率可达到0.577 4~0.636 6,最终进入六步调制区。即:Ur_overmodulation_max=0.577 4~0.636 6Udc由于在六步调制方式下,电压矢量的调整只有一个自由度,分别控制Id和Iq的电流矢量控制模式已经不再适用。同时,由于电流波形正弦度变差,带来较大的谐波和铁损。因此,本文作者在高速弱磁区使用过调制方法(调制率使用到0.605 7,在第4.3.2节说明原因),非弱磁区使用SVPWM调制方法。即:



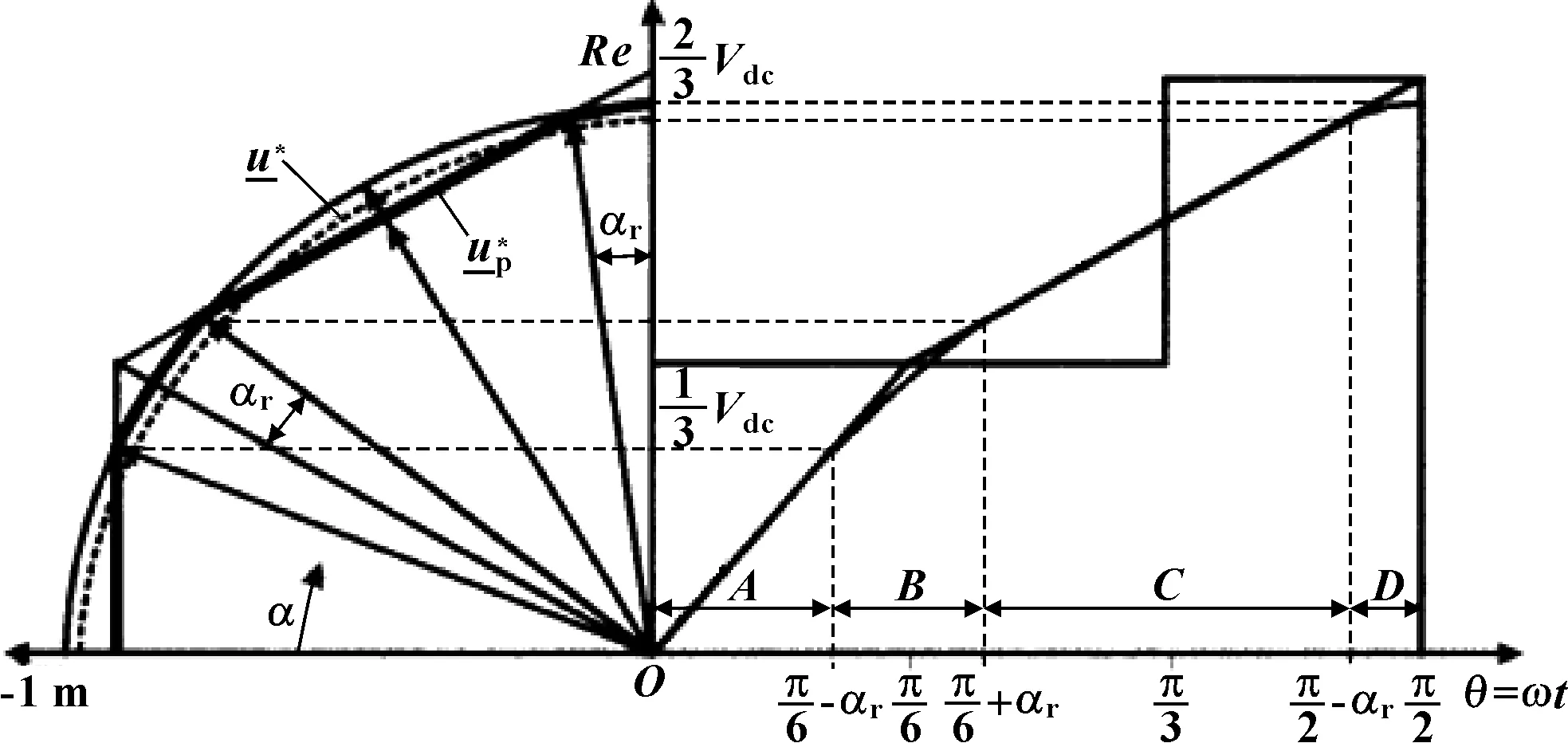
图9 文中过调制算法中等效电压矢量选取示意
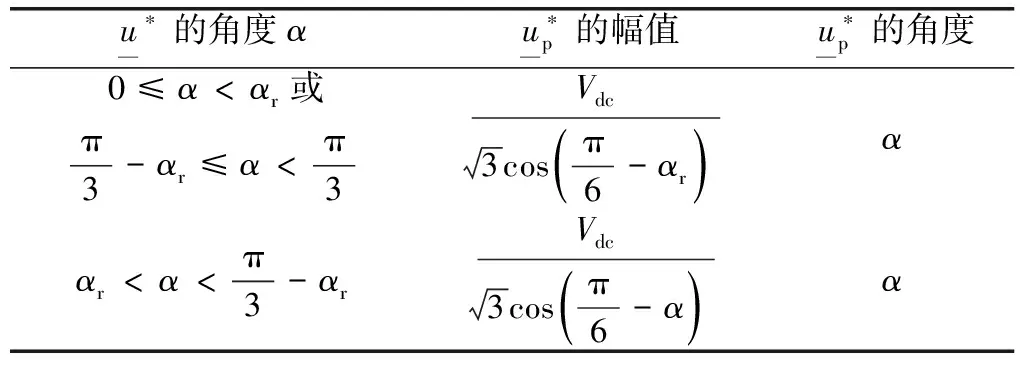
表1 过调制算法期待的电压矢量与实际采用的电压矢量对应关系

(4)
5 电压矢量弱磁控制
针对永磁同步电机弱磁控制,目前国内外广泛采用基于负Id补偿弱磁法。但由于它本质上属于电流矢量控制,未解决弱磁区内既要独立调节Id和Iq、又要满足控制端电压Us不饱和(即:Us≤Ur _max)的矛盾,导致系统存在失控风险。为避免电压饱和失控,通常预留电压余量Umargin用于电流环PI调节,从而导致控制可用端电压Us进一步减小。即:Us=Udc·KPWM-Umargin。
文中提出一种如图10所示的电压矢量弱磁控制方法,具有以下技术特点:
(1)采用电压矢量控制,利用估算扭矩对转矩指令进行直接闭环控制;
(2)可取消Umargin,从而提高电压利用率;
(3)解决了弱磁区内控制端电压Us饱和的问题,提高了弱磁稳定性,可实现高倍深度弱磁;
(4)在弱磁区内电压矢量幅值维持最大可用值,通过调节电压矢量相位φ实现对扭矩的动态控制。
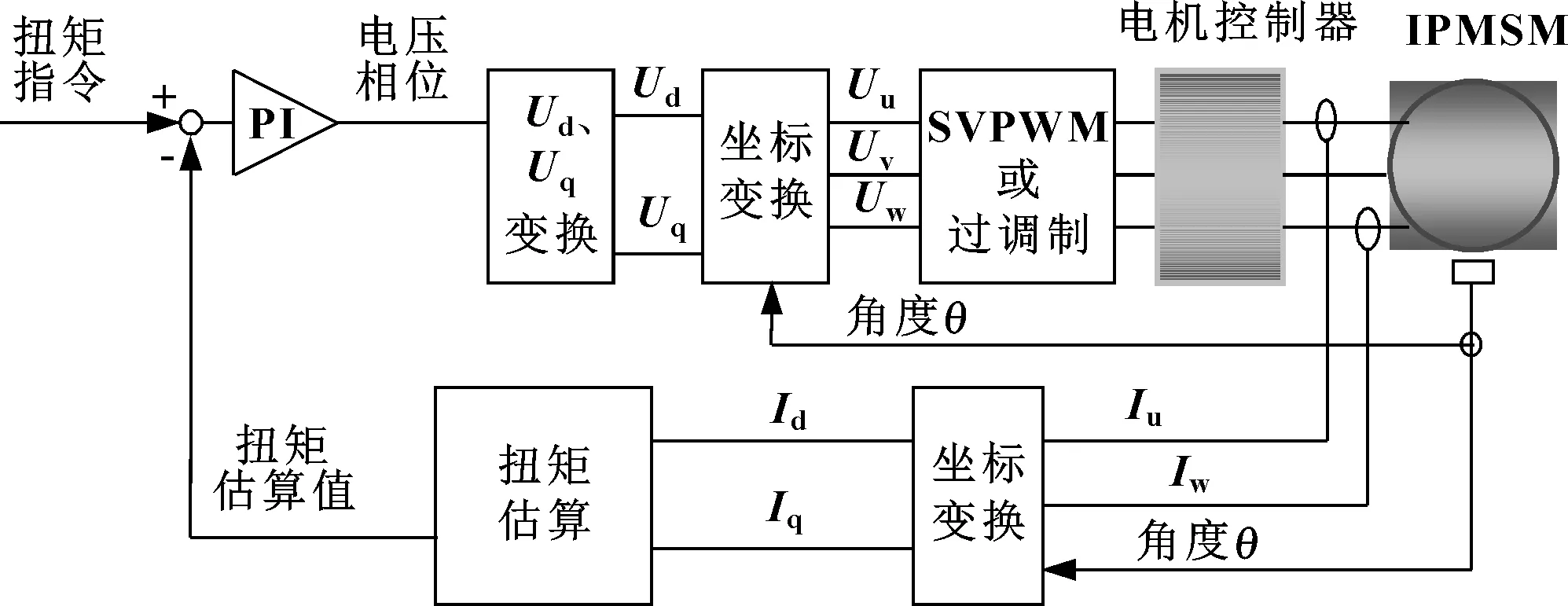
图10 基于电压矢量控制的闭环弱磁控制原理
根据电压方程可得:
(5)
(6)
其中:φ为d轴与电压矢量的夹角;Ld为直轴电感;Lq为交轴电感。
当高速弱磁时,可忽略Rs的影响,得:
(7)
(8)
(9)
(10)
对由上述方程组所确定的数学模型,通过理论分析可得如图11所示的电机相电流、输出转矩、弱磁电流Id分别与电压相位角的关系。同时图中给出了台架试验实测数据进行对比,可知理论分析与试验数据基本一致,从而验证了所开发功能算法的有效性。
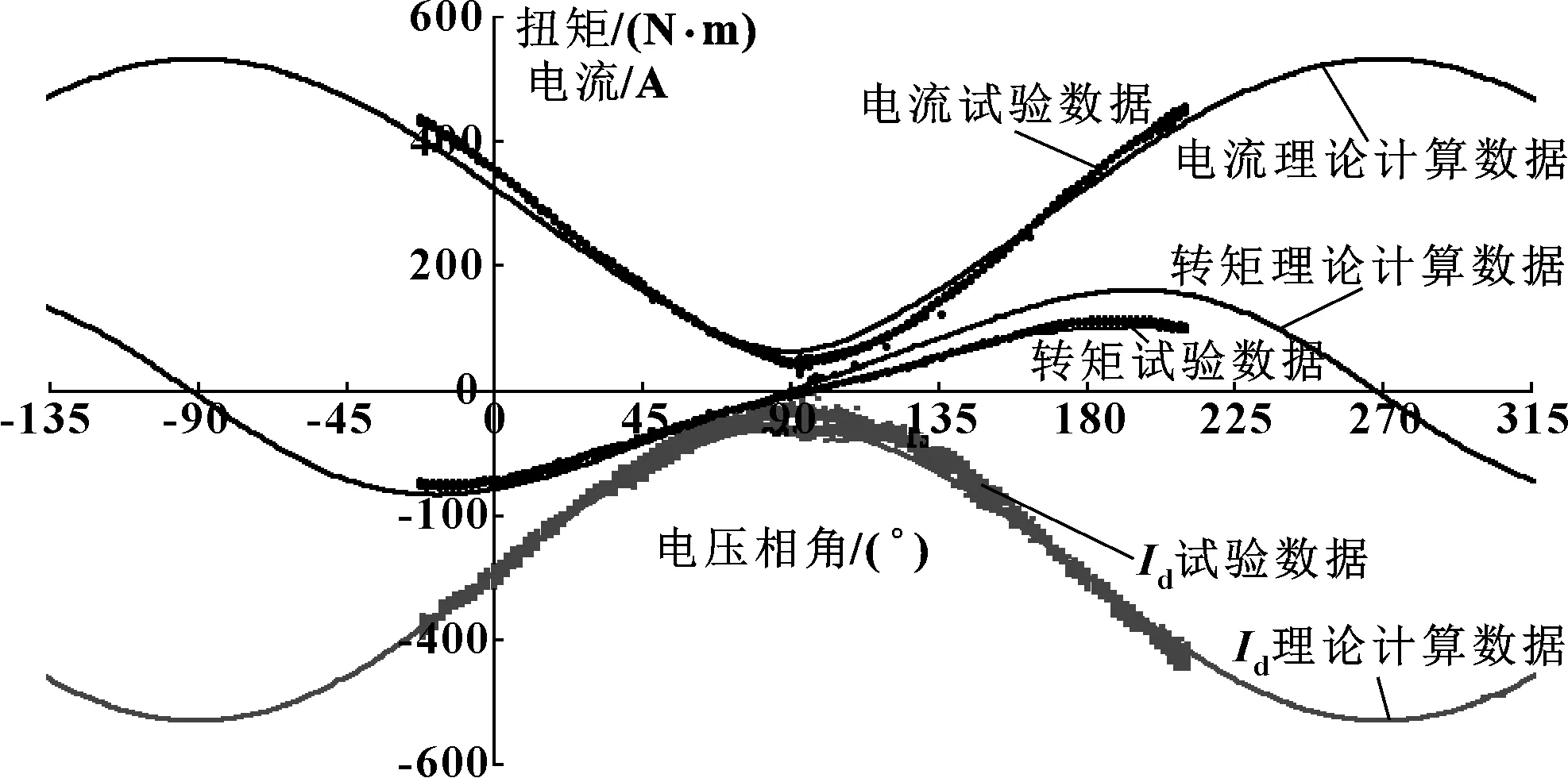
图11 电流、转矩随电压相角变化关系
可得到如下弱磁区内的重要结论:
(1)电压相角φ=90°时,转矩输出为0。当φ由90°增加时,转矩为正,当φ由90°减小时,转矩为负。当电压相角增加到某一值时,达到转矩最大值。
(2)电压相角φ由90°开始增加时,Is由极小值逐渐增加,因此,需限制电压相角范围,保证系统电流维持在允许范围内,即:Uphase_Limit_L≤U≤Uphase_Limit_H。
(3)电压相角φ由90°开始增加时,d轴弱磁电流逐渐增大,此时也要注意将弱磁电流限定在永磁体允许的范围内,避免转子永磁体退磁。
(4)随着转速升高,转矩最大时电压相角逐渐降至180°,如图12所示。
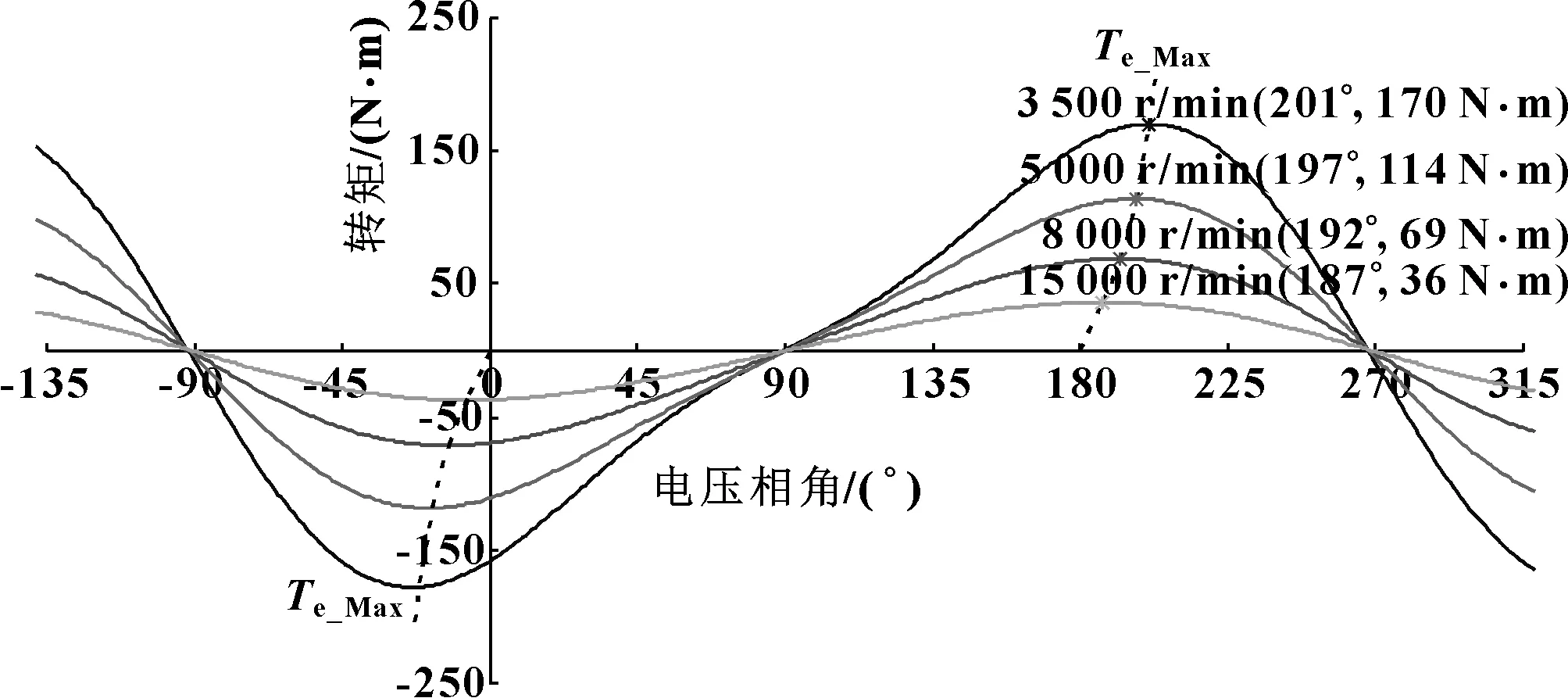
图12 不同转速下转矩与电压相角关系
6 结论
提出若干针对IPMSM的高性能控制技术,通过不同模式下的最优电流控制轨迹规划兼顾了动力性模式下对输出扭矩的需求和舒适性模式下对低转速波动的需求。使用低速增扭控制可以在MTPA控制的基础上进一步提高电机的扭矩输出能力。采用高调制率的PWM策略可以有效地提高电压利用率,从而提高电机系统的功率输出能力,提高系统效率。所开发的基于电压矢量的弱磁控制方法有效地克服了传统弱磁控制方法所存在的问题。台架标定和性能试验数据与理论分析基本一致,验证了所提出技术的有效性和先进性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年13期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
汽车实用技术(2022年10期)2022-06-09
防爆电机(2022年2期)2022-04-26
电机与控制学报(2018年9期)2018-05-14
