
基于双测量机器人的土石坝智能变形监测信息集成与整编
2020-07-09 12:12张玉炳汪晓东杨明化高全
水利水电快报 2020年5期
张玉炳 汪晓东 杨明化 高全
摘要:测量机器人相较于人工观测等监测方法,在测量精度、适应不规则建筑物形状、变形观测量程、建设和运行成本等方面均具有明显的优势,特别适合土石坝智能变形监测。结合双测量机器人应用于土石坝智能变形监测的实例,阐述了监测信息的集成和分析方法,研究了变形监测数据整编分析技术,可实现数据存储管理、数据误差修正、整理与计算。在集成测量机器人表面变形信息的基础上,研发了满足监测整编分析的业务系统,实现了测量机器人变形监测数据智能化分析。
关键词:变形监测;大坝安全;整编分析;双测量机器人;系统集成;土石坝
中图法分类号:TV698
文献标志码:A
DOI:10.15974/j .cnki.slsdkb.2020.05.013
随着水利信息化建设的快速发展,自动化、信息化、智能化的大坝安全监测技术已成为大坝安全监测的重要发展方向。土石坝是世界大坝工程建设中应用最为广泛一种坝型,其表面变形监测是重要安全监测项目,表面变形监测是判断大坝安全状态的重要途径之一。水库大坝的表面变形监测一般采用人工观测,这种观测方法在观测场景,测量精度、观测量程等方面均具有明显短板。基于双测量机器人的土石坝智能变形监测成套技术实现了“无人值守”的现代水库管理模式。在保证观测精度的基础上,实现了大坝安全自动化监管,有效改善了大坝表面变形观测的难题。结合应用实例观测信息进行大坝表面变形智能变形监测分析与系统集成显得尤为重要。研究变形监测数据整编分析方法,进行数据库管理、数据误差修正、整理与计算、整编分析和数据发布,可实现测量机器人变形监测数据智能化分析,进而实现大坝安全分析,预测大坝变形趋势,进行预警报警,加强安全监管,可弥补工程管理信息化短板。
1 系统组成
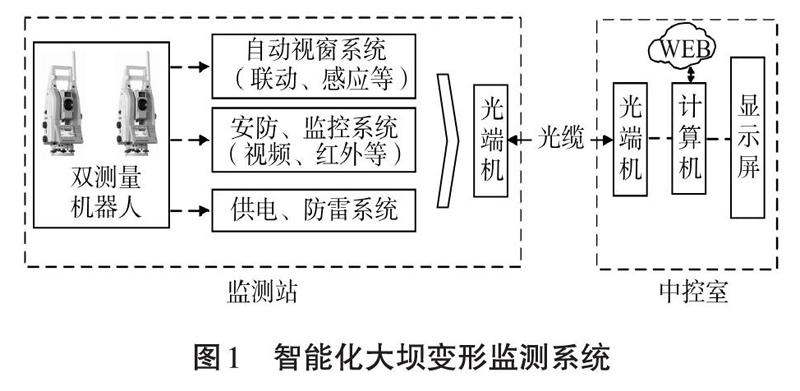
双测量机器人系统的硬件系统组成包括基站、参考点、监测点、计算机和安防系统[1]。基站由观测墩、测量机器人、观测房组成,测量机器人架设于基点上,基准点组成控制网,监测点布置在变形体表面,由观测墩、正对基站的棱镜、数字式温度计和气压计组成。根据工程实际和规范要求,监测点较均匀地布设于变形体有代表性的横纵断面上。数据监测软件通过光缆与测量机器人通信,实现全自动测量、转换、计算和存储等功能。智能化大坝变形监测系统见图1。
2 信息集成
信息集成主要是实现测量机器人监测数据的实时获取、传输、转换和存储,经处理后的数据为业务信息系统所用,并为后期的资料整编和分析评价提供数据支撑。
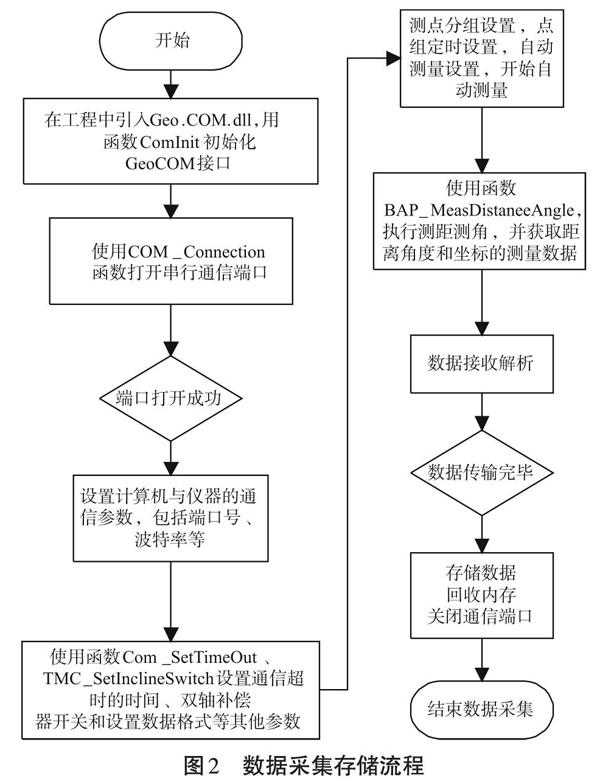
测量机器人的数据采集系统采用模块化设计,这种设计的优势是结构清晰、便于后期的调试与维护。主要有GeoCOM连接、参数设置、测站配置、测量控制、测量、数据接收解析、数据存储管理7个功能模块,各模块通过Visual Studi0 2015开发的系统界面操作实现,其业务流程如图2所示。
GeoCOM是一个用于建立通信的动态链接库,该连接模块负责上位机与全站仪之间的通讯,用户可通过界面改变系统的串口号、波特率、校验码和协议等4个参数。
测量模块是智能测量系统的核心模块,用于数据测量工作。可实现两个主要功能:
(1)执行测量命令,并将测量数据发送到绘图模块和数据显示与管理模块。
(2)采用循环监控的方式,实时显示仪器角度参数(垂直角、水平角),便于用户随时了解当前全站仪望远镜的位置。
关系型数据库管理模块通过ADO接口实现测量数据对数据库文件的读写操作。
数据显示与处理模块用于将水平角H、垂直角V、斜距、高程、北坐标、东坐标等测量数据显示在MSFLXGRD网格上,以及通过内部算法计算出测量点北坐标、东坐标、高程上的位置关系。
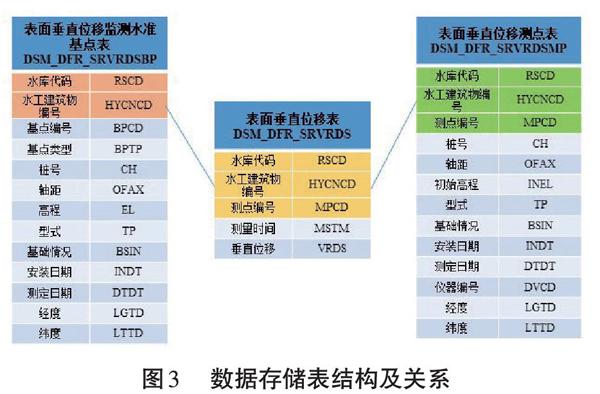
测量机器人采集的数据需要进行解析后存储到关系型数据库中,既要能满足表面变形观测数据存储利用的需要,又要符合数据表结构基本设计原则,存储表结构及关系如图3所示。
(1)表面垂直位移监测水准基点或水准工作(起测)基点表(表名DSM_ DFR_SRVRDSBP),用于存储表面垂直位移监测水准基点或工作(起测)基点的考证信息。
(2)表面垂直位移表(表名DSM_ DFR_SRVRDS),用于存储表面垂直位移测点的监测成果。
(3)表面垂直位移测点表(表名DSM_DFR_SRVRDSMP),用于存储表面垂直位移测点的考证信息。
3 资料整理整编
各种观测数据为水库大坝的运行工况提供了第一手资料。通过对第一手资料进行去粗取精、去伪存真、由此及彼、由表及里处理,才能作出正确的判斷,获得规律性的认识,保证水库安全和合理运用,为设计、施工、管理和科学研究提供依据。以上工作统称为资料整理整编,其重点是计算、查证原始观测数据的可靠性和准确性。
监测资料整理整编工作主要包括历史数据补录、原始数据转换计算、阈值法数据剔除、粗大误差清洗以及特征值计算等[2]。
(1)历史数据补录。基于数据钻取的监测点变化可视化整编,发现监测数据缺失时段时,应利用人工观测记录进行监测数据补录。
(2)原始数据转换计算。通过计算,将频率、温度、模数等原始物理量转换为结果值,确定并录入仪器基准值。
(3)阈值法数据剔除。通过设定监测仪器测值变化范围,自动查找不满足阈值范围的测值及对应时间,通过颜色标注,并支持用户编辑。
(4)粗大误差清洗。通过尖峰识别法(见图4)、标准差法对数据进行可靠性检验,结合相关测值进行误差分析,对粗差进行自动判别及剔除。对随机误差或偶然误差,按正态分布规律,采用常规误差理论进行分析处理。对于系统误差,可通过校正仪器来消除。
(5)特征值计算。通过实时计算监测点数据的最大值、最小值、最大变幅、超历史最高等特征值,结合数据变化过程,判断特征值合理性。
4 数据分析方法
监测资料分析方法包括比较法、作图法、特征值统计法、数学模型法等,具体内容包括时序分析、相关性分析、回归分析、专项分析等,并为资料整编分析报告提供数据支撑[3]。
4.1 时序分析
时序分析主要是以分析时间序列的发展过程、方向和趋势,预测将来时域可能达到目标的方法,分析效应量随时间的变化规律和在空间分布上的特点。
(1)以相关历史资料数据为依据,区别不规则变动、循环变动、季节变动等不同时间的动势,特别是连续的长期动势,并整理绘出统计图。
(2)从系统原则出发,综合分析时间序列,反映因果联系及影响,分析各种作用力的综合作用。图5为某次防洪调度过程中,当闸门开启后入库流量、出库流量和水库水位之间的时序变化关系。
(3)运用数学模型,如移动平均法、季节系数法、指数平滑法求出时间序列以及将来时态的各项预测值。时序分析适用以数据量化的时序系统,主要是以概率统计分析随时间变化的随机系统。
4.2 相关性分析
相关性分析是通过分析效应量的主要影响因素及其定量关系和变化规律,以寻求效应量异常的主要原因,考察效应量与原因量相关关系的稳定性[4]。
为确定相关变量之间的关系,首先收集由时间、测值组成的成对数据,然后在直角坐标系上描述这些点,形成“散点图”。根据散点图,当自变量取某一值时,因变量对应为一概率分布。如果对于所有自变量取值的概率分布都相同,则说明因变量和自变量不存在相关关系,反之亦然。
图6是将上游水位变化与管水位变化进行相关性分析。选取时间,上游水位和时间,管水位数据点进行组合形成散点图,样本数为827个,计算其相关系数r=0.899 2,回归方程为Y=0.498X+25.687 5。
4.3 回归分析
回归分析主要是预报效应量的发展趋势并判断其是否影响工程的安全运行,并分析效应量观测值的特征值和异常值等。
回归分析是确定两种或两种以上变量间相互依赖的定量关系的一种统计分析方法,分为一元回归和多元回归分析。
线性回归使用最佳的拟合直线(也就是回归线)在因变量y和一个或多个自变量X之间建立一种关系。多元线性回归可表示为Y=a+blXi +b2X2+e,其中a表示截距,b表示直线的斜率,e是误差项。多元线性回归可以根据给定的预测变量s来预测目标变量的值。
图7为上游水位、下游水位与管水位之间的多元线性回归结果,样本数为443个,回归系数分别为0.261 6和0.130 3,复相关系数为0.853 8。
4.4 专项分析
专项分析是根据工程需要和工程特性,针对建筑物的某一特性采取综合分析的一种方法,例如历次巡视检查对比分析、坝体浸润线分析、渗透坡降分析等,专项分析更加直观具体,针对性更强,能为后期的分析评价提供更有效的依据[5]。如花凉亭水库2002,2006,2014年和2015年的典型监测断面浸润线的变化过程,通过对比分析其渗透坡降的变化趋势;分析某水库典型监测断面的实测浸润分布,对大坝安全有很重要的参考价值。
5 系统实现
基于双测量机器人的土石坝智能变形监测技术在安徽省花凉亭水库得到成功应用。在实现测量机器人信息集成的基础上,结合工程需要,采用了部分监测资料分析方法,完成了以安全监测资料整编分析为核心的业务信息系统研发。系统功能包括数据查询、数据整理、资料整编、时序分析、相关分析、回归分析和资料整编报告生成等功能。该系统可为管理人员提供简单易操作的专业整编分析功能[6]。
系统采用Springboot后端框架,按照分布式SOA技术架构,以面向服务的组件模式,为管理单位提供在线的资料整编分析技术服务。利用业务信息系统的功能,通过对花凉亭水库典型断面的分析发现,其上游高程82.5 m马道、坝顶上游向和下游向、下游高程82.0 m马道均有不同程度地下降,下降趋势较缓。
6 结语
基于双测量机器人的土石坝智能变形监测技术在花凉亭水库得到成功应用,为水库管理单位表面变形观测提供有效手段,提高了土石坝变形监测的效率及准确性,减轻了管理人员的工作强度,推进了大坝自动化、智能化管理。
本文阐述了基于双测量机器人以土石坝表面变形监测信息的集成方法,研究了变形监测数据整编分析技术,实现了数据存储管理、数据误差修正、整理与计算,研发了具有监测整编分析功能的业务系统,实现了测量机器人变形监测数据智能化分析。工程实际应用表明,以大坝安全监测整编分析为核心的业务信息系统弥补了水库大坝安全监管信息化短板,突破水库管理人员技术能力瓶颈,实用价值较高。
参考文献:
[1]杨明化,潘建波,章赢,监测自动化系统在花凉亭水库出险加固中的应用[J].人民长江,2011,42 (12): 36-39.
[2]周启,王大江,杨明化,等.基于测量机器人的大坝智能化变形监测系统研究与应用[C]//中国水利学会2016学术年会论文集,南京:河海大学出版社,2016.
[3]陈优良,卞焕,虞列沛,等.基于测量机器人的露天矿边坡变形+在线分析与预测[J]有色金属科学与工程,2018,9(6):72-80.
[4]陈磊,尹燕运.基于TS30测量机器人自动化变形监测系统的开发与应用[J]岩土工程技术,2016.30(3):109-113.
[5]黄声享,张翠峰,沈凤娇.大坝监测资料的整编分析方法[J].测绘工程,2009,18(6):4-10.
[6]何向阳,周启,周和清,等,水库大坝监测资料整编分析系统的研究与开发[J].人民长江,2015,46 (23):108-111.
(编辑:唐湘茜)
基金项目:国家重点研发计划项目“基于大数据的大坝安全诊断与预警关键技术”(2018YFC0407106);国家大坝安全工程技术研究中心项目“土石坝表面变形智能监测成套技术研究”( CX2017231)
作者简介:张玉炳,男,高级工程师,碩士,主要从事水利信息化工作。E-mail:zhangyubing@cjwsjy.com.cn
猜你喜欢
读与写·教育教学版(2017年1期)2017-02-05
中国新技术新产品(2017年1期)2017-01-20
建筑建材装饰(2016年12期)2017-01-19
环球人文地理·评论版(2016年8期)2017-01-19
电子技术与软件工程(2016年22期)2016-12-26
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科学与财富(2016年28期)2016-10-14
