新能源汽车整车CAN网络技术研究
2020-07-09 03:17白琳霍强强何孟锡
汽车世界·车辆工程技术(中) 2020年2期
白琳 霍强强 何孟锡
摘 要:新能源汽车CAN技术对于提高汽车整体运行性能极为重要,通过分析整车网络拓扑机构,在设计时根据需要新能源汽车的整车网络结构,然后需要参考分层结构,结合独立控制器和集成控制器,对硬件层、数据层、传输层进行了设计。
关键词:新能源汽车;CAN网络基数;研究
1 整车CAN技术概述
CAN(Controller Area Network)控制器局域網络。CAN网络在早期的整车应用中以BCM(车身控制器)为控制中心,主要是车身零部件(雨刮/大灯/车窗…),智能硬件较少,所以早期的正常CAN网络把所有其他的ECU全部放在Other ECU里边。ECU(Electronic ControlUnit)电子控制单元,是汽车专用微机控制器,一个ECU一般负责1个或多个智能硬件设备。每条CAN总线一般都是由2根线组成的双绞线构成,一根can_high,一根can_low,分别代表高电平和低电平,一般燃油车的CAN网络可以分成5条CAN总线:PT CAN (PowerTrain CAN)动力总成CAN总线,PT CAN负责车辆动力,是整车CAN网络信号优先级及信号传输速率最高的一条CAN总线;CH CAN (Chassis CAN) 底盘控制CAN总线,CH CAN负责汽车底盘及4个轮子的制动/稳定/转向,由于涉及整车制动/助力转向等,所以其网络信号优先级也是较高的;Body CAN车身控制总线,Body CAN负责车身上的一些提高舒适性/安全性的智能硬件的管理与控制,其网络信号优先级较低,因为以上设备都是辅助设备;Info CAN (Infomercial CAN) 娱乐系统总线,Info CAN是辅助可选设备,所以优先级也是较低的,主要负责车身上的一些提高娱乐性的智能硬件的管理与控制;DiagCAN(Diagnose CAN)诊断控制总线,电动汽车的CAN网络模型也类似,只是其控制单元主要以VCM(Vehicle Control Module)整车控制模块为控制中心。
2 整车总线协议的设计与实现
2.1 整车网络拓扑结构
车辆网络拓扑是指车辆通信网络中设备节点相互连接的形式和方法。按照结构分类,主要包括:星形结构、总线结构、环形结构和树形结构。星形拓扑是一种以集线器(以中心为中心,采用集中控制模式,并且多个外围节点以放射状方式连接到中心节点)的结构,这种结构的优点是安装简单、易于管理;缺点是中心节点的负载较重,可扩展性受到中心节点的限制,这将增加车辆网络的电缆使用量,如图所示。总线拓扑结构是该结构以总线作为公共数据通道,每个节点都连接到同一总线,这种结构的优点是安装简单、易于扩展,每个节点的状态相同,总线上共享数据;缺点是由于通道共享,任何时候都只允许一个节点发送数据,并且总线上的节点数是有限的,这种结构通常用于汽车通信网络中,尤其是在设备有限的子网中。环拓扑是其中每个节点首尾相连以形成闭合环的结构。这种结构的优点是结构简单、易于联网;缺点是网络中信息的单向传输,节点数不宜过多,单个节点故障将使整个网络无法正常工作。汽车通信网络具有较高的实时性和可靠性,因此在应用于汽车时需要增加冗余通道以提高可靠性。树形拓扑是总线拓扑和分层结构的扩展,分层结构由以分支形式的唯一“根”节点组成。优点是一个分支的故障不影响其他分支的正常运行,节点易于扩展,并且故障易于分离;缺点是整个网络的正常运行取决于根节点,如果根节点发生故障,整个网络将无法正常工作。
2.2 CAN分层结构设计
根据参考模型,信息交换模型分为两层。从该层到该层是物理层、数据链路层、网络层、传输层、会话层、表示层和应用层。Can控制器主要实现物理层和数据链路层的协议。物理层完成串行通信的位编码,位时间和同步,并以差分电平的方式实现位数据的传输。数据链路层实现逻辑链路控制子层(完成消息的接收过滤,通知接收者过载通知,重新发送仲裁和发送失败消息;实现媒体访问控制子层(完成封装,接收和发送数据的反汇编和错误检测)控制器中未集成上位通信协议,根据项目的实际需要,传输层和应用层协议为参考协议,由软件编译实现。
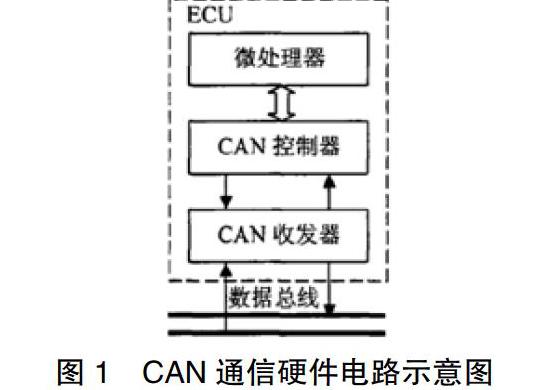
2.3 CAN通信硬件电路
通信硬件结构的原理是实现通信。在硬件方面,需要控制器、收发器、传输介质和终端电阻。硬件结构的原理如图1所示。收发器安装在控制器与传输介质之间,该收发器将来自控制器的数据转换为电信号并将其传输到传输介质,同时在接收器上接收信号。传输介质并将其转发给控制器。
2.4 数据链路层
接口驱动器结构独立的控制器与微处理器通信采用接口。微处理器的内部集成接口可以通过使用接口驱动程序来实现对微处理器的控制,然后使用驱动程序来实现控制器的初始化、数据接收、数据发送和错误处理。内部集成控制器可以直接控制微控制器。驱动程序可以实现控制器的初始化、数据接收、数据发送和错误处理。为了提高代码的可移植性,控制器的驱动程序被硬件层驱动程序封装,数据链路层使用该驱动程序来实现硬件和软件之间的隔离。
2.5 传输层
传输层的功能是在应用程序层和数据链路层之间传输消息时实现消息的封装和分解。层之间的消息传输过程可以描述为:在接收部分,数据由控制器通过硬件层处理后发送到数据链路层;在消息部分,数据由应用层通过传输层处理,然后发送到数据链路层,接收和发送的过程:在周期性服务功能部分,服务功能从数据链路中提取接收到的数据层,然后在传输层进行数据处理后,将其发送到应用程序层以分析数据;数据从数据链路层提取出来,并在经过硬件层处理后发送到控制器到总线。
3 结束语
新能源汽车CAN技术对于提高汽车整体运行性能极为重要,通过分析整车网络拓扑机构,在设计时根据需要新能源汽车的整车网络结构,然后需要参考分层结构,结合独立控制器和集成控制器,对硬件层、数据层、传输层进行了设计。
参考文献:
[1]于红秀,王娇娇,李晓等.BMS与直流充电机CAN通信网络通信品质的分析与评价[J].汽车电器,2020(03):11-15.
[2]肖大伟,曾其林,王志民等.基于CAN网络的便携式纯电动客车检测诊断平台开发[J].东方电气评论,2016,30(04):15-19.
猜你喜欢
证券市场红周刊(2018年17期)2018-05-14
军事文摘·科学少年(2017年4期)2017-06-20
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
地震研究(2017年1期)2017-04-10
地震研究(2017年1期)2017-04-10
数学学习与研究(2017年2期)2017-03-06
中国市场(2016年32期)2016-12-06
科学与财富(2016年15期)2016-11-24
大经贸(2016年9期)2016-11-16