新能源客车的自动充电系统设计
2020-07-16 03:01夏修龙
中国新技术新产品 2020年9期
徐 威 夏修龙
(特来电新能源有限公司,山东 青岛 266104)
0 引言
近年来,国家发改委、能源局等发布了《电动汽车充电基础设施发展指南(2015-2020)》《提升新能源汽车充电保障能力行动计划》《新基建发展白皮书》等政策。在政策利好的形式下,充电行业迎来了快速发展期。充电桩的建设数量与日俱增,但迅猛发展的同时也存在诸多问题。该文从2 个人工充电方式的问题入手,进行调研分析,着力探索新能源客车的自动充电方式。1) 传统人工充电方式问题传统的充电枪充电电流小,充电时间长。单把枪的充电电流在250 A 以下,常规的城市公交车需要6 h~8 h 充满,很难满足城市公交运营的需要。
传统的充电枪在充电时,采用人工插枪的方式,插枪力在140 N 以上,部分车辆为了满足快速充电的需求,同时采用2 把枪、3 把枪甚至4 把枪给车辆充电,用户费时费力,造成了极差的用户体验。2) 无人驾驶推动了无人充电技术的发展随着人工智能、无人驾驶等技术的发展日趋成熟,面向无人驾驶车辆的无人充电技术仍然相对薄弱。无人驾驶必须采用无人化的自动充电设备,车辆停到充电车位后,自动插枪、自动充电、充电完成后自动拔枪,整个充电过程不需要人为干预。
为此,该文提出了一种基于自动连接的传导式自动充电系统,该系统简称“充电弓”。该系统的充电功率大,自动搭接,充电全过程不需要人员参与,成为新型的新能源汽车充电方式。
1 系统方案
充电弓面向电动客车的顶部自动充电进行设计研发,为电动客车提供自动化、大功率的充电服务。通过下压式充电机构自动连接电动汽车的充电接口,给电动汽车进行快速充电,如图1 所示。司机不需要进行下车插枪的操作,充电弓能自动识别到站的车辆,自动与车辆匹配进行充电,不需要人工操作。同时充电设备占地面积小,适应城市道路及公交集中场站要求,成为新型的城市公共交通充电解决方案。
在系统的整体设计上,充电弓由弓体、弓头、充电直流机组成。弓体作为支撑固定设备,悬挂充电弓头。充电直流机将电网的交流电变换为可给电动汽车充电的直流电。弓头由驱动机构、上下伸缩机构、底部电极机构组成,充电过程中自动下降与车顶受电装置搭接,实现电能传输。

图1 充电弓与新能源客车充电过程
2 控制系统设计
该系统的方案拓扑如图2 所示,整套系统采用2 个控制单元。充电设备的常规功能由充电桩主控板实现,运动功能由运动控制单元实现。2 个控制单元之间采用以太网的方式进行通信。
2.1 充电弓主控系统设计
充电弓主控系统作为充电的集中处理单元,负责整个充电体系的流程控制。负责控制电能的输出,并控制运动执行单元动作。下挂车辆识别模块、电量显示模块、无线通信模块,并通过4G 连接云端平台。
2.1.1 车辆识别模块
车辆识别是指车辆进入充电弓的可允许停车范围内,充电弓能够自动识别车辆的身份信息。对常规的车辆来说,一般都采用车牌识别的方式来识别车辆的身份信息。充电弓由于安装在车辆顶部,相机无法照射到车牌,所以无法采用车牌识别的方式。充电弓识别车辆时采用RFID 无线射频的方案,该方案技术较为成熟且已大批量的应用到高速公路的ETC 自动收费中。
RFID 无线射频方案由读写器和标签组成,RFID 读写器安装在充电弓下方,电子标签安装在车辆顶部[1]。读写器向下定向发送860 MHz ~960 MHz 的超高频电磁波。当车辆停靠在充电弓下面的区域时,读写器获取车辆顶部标签的信息,并将读取的标签信息通过RS-485 通信方式传送给充电弓主控板,充电弓主控板根据标签信息判断车辆的身份。

图2 系统方案拓扑
2.1.2 电量显示模块
电量显示模块安装在充电弓顶部,主要负责将当前充电车辆的SOC 电量值显示出来,司机在距离车辆较远的位置也可以查看车辆的SOC 值。当电量充满后,车辆顶部的电量显示模块会跳转到另一状态,提示司机挪车。
电量显示模块与充电弓主控系统之间采用RS-485 通信,借用标准的Modbus-RTU 通信协议,传输当前的充电电量、故障、空闲等状态。
2.1.3 无线通信模块
在充电前以及充电的过程中,车辆BMS 与充电机须进行信息交互,传输GB/T 27930—2015 的报文,交互充电电压、充电电流等信息[2]。为此采用CAN 转Wi-Fi 模块进行数据传输。每台充电弓作为AP,有固定且唯一的Wi-Fi 名称和密码,车辆的Wi-Fi 作为Station。车辆停在充电弓下方时,根据Wi-Fi 名称与密码配置原则,连接对应的充电弓,连接完成后,开始进行数据信息的交互[3]。
交互的报文采用UDP(User Datagram Protocol)协议,在标准CAN 帧的基础上增加报文头与报文尾,组成UDP 格式的报文,一个UDP 帧包含一个CAN 帧,如图3 所示,帧ID与数据为原始的CAN 帧,增加帧头、发送模式、帧信息、时间戳、校验后形成UDP 格式的数据包。
2.2 运动控制单元设计
运动控制单元选用可编程的逻辑控制器作为信息处理与控制单元,与充电弓主控板采用TCP/IP 通信,接收动作指令,与各个传感器及驱动单元协调控制,控制充电弓上升下降,实现自动充电功能。

图3 UDP 格式协议帧
2.2.1 位置检测单元
充电弓在上下运动时,为防止充电弓超出行程的运动范围,造成机械损伤,在充电弓运动的上限与下限各增加接近开关,进行安全监测,保证充电弓不超出运动范围。
2.2.2 温度检测单元
充电弓的充电电流大,一般为500 A~800 A,充电时产生的温升较高。尤其是因车顶不平,导致充电弓的电极与受电弓的电极搭接不良时,接触电阻增大,温升会急剧增长,造成电极烧毁,产生安全事故。为此,在充电弓的电极上增加温度检测单元,实时采集温度信号,并将温度信号反馈给运动控制单元进行处理。
运动控制单元检测到温升超过一定阈值时,及时停止充电,防止温度过高,烧毁电极。该温升阈值的选择需要综合考虑充电电流以及搭接次数。图4 选取了电极的不同位置,在充电电流为500 A 的情况下,搭接次数与温升的变化值,从图4 中可以看出,充电弓在正常充电的过程中,温升最高为50 K。根据该测试数据,将充电弓的温升检测阈值设置为50 K。
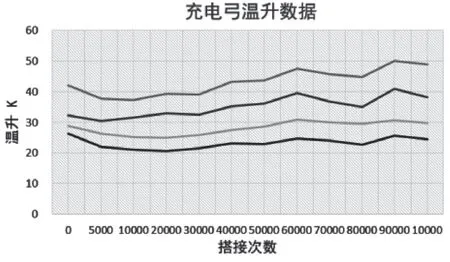
图4 搭接次数与温升关系图
2.2.3 压力检测单元
充电弓的电极与车辆顶部受电弓的电极在搭接后,搭接压力与接触电阻成线性关系,搭接压力越大,接触电阻越小。但搭接压力较大时,会对机械结构造成损伤。图5 是实验室测试的搭接压力与接触电阻的关系,经实验测试数据得出,搭接压力在240 N 左右,接触电阻较小。
因此,在充电弓的电极顶部安装了压力传感器,并将数据实时反馈给运动控制单元,运动控制单元根据压力的大小来控制驱动单元运动。在充电弓下降时,当压力达到预设值时,停止运动并实时保持该搭接压力。
2.2.4 驱动单元
充电弓的上升、下降都通过驱动单元来提供驱动力。驱动单元与运动控制单元采用总线通信的方式,驱动单元根据运动控制单元提供的信号进行上升下降。
驱动单元选用220 V 的伺服电机,运动精度高、反应速度灵敏。在充电时车辆会因上下乘客导致高度差发生变化,伺服电机会以100 ms 的速率进行动态补偿,使电极的搭接压力保持在合适的范围内,保障充电的安全可靠。

图5 搭接次数与温升关系图
3 结语
通过上述方案,该文设计出了面向新能源客车的自动充电方式。该方式采用了多种智能传感设备,使充电趋于自动化,充电全过程不需要人为参与,大大提高了用户体验。目前该方案已经在成都、上海等地建设运行,得到客户的一致好评。在未来,随着人工智能、无人驾驶的普及,对充电方式也会提出更高的要求,使充电朝着自动化、无人化的方向发展,充电弓完美解决了未来无人驾驶车辆对于无人充电的需求问题。
猜你喜欢
防爆电机(2022年5期)2022-11-18
防爆电机(2022年4期)2022-08-17
学苑创造·B版(2022年9期)2022-05-30
电子制作(2018年2期)2018-04-18
四川水力发电(2018年4期)2018-03-25
单片机与嵌入式系统应用(2017年8期)2017-04-17
电脑知识与技术(2016年24期)2016-11-14
广西电力(2016年5期)2016-07-10
铁道通信信号(2016年8期)2016-06-01
中国高新技术企业(2015年14期)2015-04-29