双通道控制遥控继电器设计
2020-07-20 16:20胡宁博
无人机 2020年2期
胡宁博
遥控继电器用于检测航模接收机输出的PWM信号,并根据PWM信号脉冲宽度控制继电器吸和与断开以控制其他设备工作。其用途包括控制灯带和水泵供電、控制点火头和切缆器点火、控制发动机启动或熄火、控制相机快门等。为防止误触发采用双通道信号控制,当两路信号量都有效时继电器才动作,避免了因误碰遥控器开关而造成事故的可能。模块采用国产的8脚STC单片机编程控制,控制准确可靠,体积小巧而且成本低。
航模遥控设备成本低廉、控制可靠,在航模控制、无人机调试、试飞中有着广泛的应用。航模接收机输出的信号为可变宽度的脉冲,即PWM信号,用于控制航模舵机。脉冲的宽度决定舵机转动角度。一般而言,舵机的基准信号都是周期为20ms,正脉冲宽度为1.5ms。这个基准信号可使舵机位于舵机中位。不同型号舵机的转角范围可能不相同,但是其中间位置的脉冲宽度是一定的,都是1.5ms。航模遥控器输出的PWM信号正脉宽一般在0.5ms-2.5ms之间。当我们需要用航模遥控设备控制其他机载设备时,就需要对航模接收机输出的PWM信号脉宽进行判别,根据脉宽控制继电器动作从而控制被控设备。
在控制航模发动机启动熄火、点火头或切缆器等火工品点火时,操作手误触航模遥控器开关可能会导致严重的事故,造成较大的财产损失甚至人员伤亡。因此在控制此类设备时,可采用双通道信号控制,配置到航模遥控器上距离较远的两个机械开关,当两个开关同时打开时才动作。这样可以极大地避免误触开关造成的危险。为了保护检修航模的机务人员,必要时也可以设置手动保护开关,在检修调试过程中禁止启动或点火,检修完毕机务人员撤离前打开开关。
目前,市场上可选购的航模遥控继电器比较多,但都是单路控制,此类产品对于体积、重量等控制得很好,而对于可靠性及安全性的设计却有所疏忽。因此我们设计了具有较高安全性的双通道控制航模遥控继电器。
硬件电路设计
航模遥控继电器硬件电路组成框图如图1所示。航模遥控接收机的PWM信号经信号调理电路简单处理后送到微控器进行判别。微控器根据PWM信号脉宽,输出高低电平控制继电器驱动电路控制继电器的开闭。
信号调理电路
航模遥控继电器信号调理电路部分如图2所示。
P2为输入信号连接器,从航模遥控接收机获取供电和PWM信号。R4、R13为下拉电阻,当信号线未可靠连接时下拉电阻将输入端拉低,避免信号调理电路受外界信号干扰。R2与C12、R7与C15构成简单的RC虑波电路。V3及V4为用于钳位输入电平的稳压二极管,在输入电压高于5.1V时起保护作用。U2为双路反向输出施密特触发器,起输入缓冲和波形整形作用,防止因输入信号电平抖动造成的误判。
电源电路
电源电路如图3所示。用电池直接供电时,电压变化范围比较宽。在电池放电过程中可能会低于5V,采用升/降压电路虽然能保证电源电压恒定,但电路复杂体积大。而本电路功耗并不大,工作电压范围为4.5-5.5V,因此采用稳压二极管V1和串联电阻R12稳压。为了减小模块体积,虑波电容选用10uF陶瓷电容。C1、C2、C3为芯片去偶电容,元件布局时放在相应芯片电源脚附近。
控制器电路
控制器采用国产单片机STC15F104W,该单片机为8脚SOP封装,体积小,简单易用,成本低廉。该单片机采用增强型8051内核,指令代码完全兼容传统51单片机。内部集成RC振荡器和复位电路,可以省掉外部晶振和外部复位电路。片上有4k字节Flash程序存储器,128字节SRAM,INTO-INT4共5路外部中断,2个16位可重载定时器、硬件看门狗等资源。
控制器电路如图4所示,P1为程序下载口,可通过单片机的ISP功能向单片机中下载程序。D3为状态指示灯,接P3.5口,用于指示模块工作状态。P3.2、P3.4用于接收PWM信号。P3.3为继电器控制信号输出,该引脚是RSTOUT LOW即上电和复位后输出低电平(需要在下载程序时选择相应配置),可以避免上电或单片机复位瞬间输出错误电平使继电器误动作。
继电器驱动电路
图5为继电器驱动电路。用NMOS管2N7002作驱动增强。R6、C11构成RC滤波防止输入端有尖峰脉冲。R11为下拉电阻。D2为保护二极管,在02关断瞬间泄放继电器线圈产生的反向电动势。P7为保护开关连接器,外接保护开关,当保护开关断开时,起保护作用;当保护开关闭合时,继电器才能顺利闭合。不用保护开关功能时,可在R*1焊上0欧电阻,短接保护开关。也可以将保护开关接在R11两端,当开关闭合时02栅极被短路到地起保护作用,开关断开时02可正常工作,避免因保护开关断线造成电路一直处于保护状态不能正常工作。继电器选用5V超薄型继电器HF41F/5-28S,平装使电路更紧凑,6A的触点切换能力满足常见应用,如将模块用于点火启动可用该继电器控制大电流的接触器。P5为被控电路接线端。当用作点火头等火工品的控制时,可将长闭触点接地,动触点接点火头正极,常开触点串联合适限流电阻后接点火电源正极。当驱动大电流继电器、电磁铁等感性负载时,需要外加续流二极管保护触点。
软件部分设计
软件功能比较简单,主要是两路PWM脉冲宽度的测量。在本设计中,用定时器1做PWM脉宽测量,定时器2做脉冲接收超时判断以及故障状态LED灯闪烁的计时。
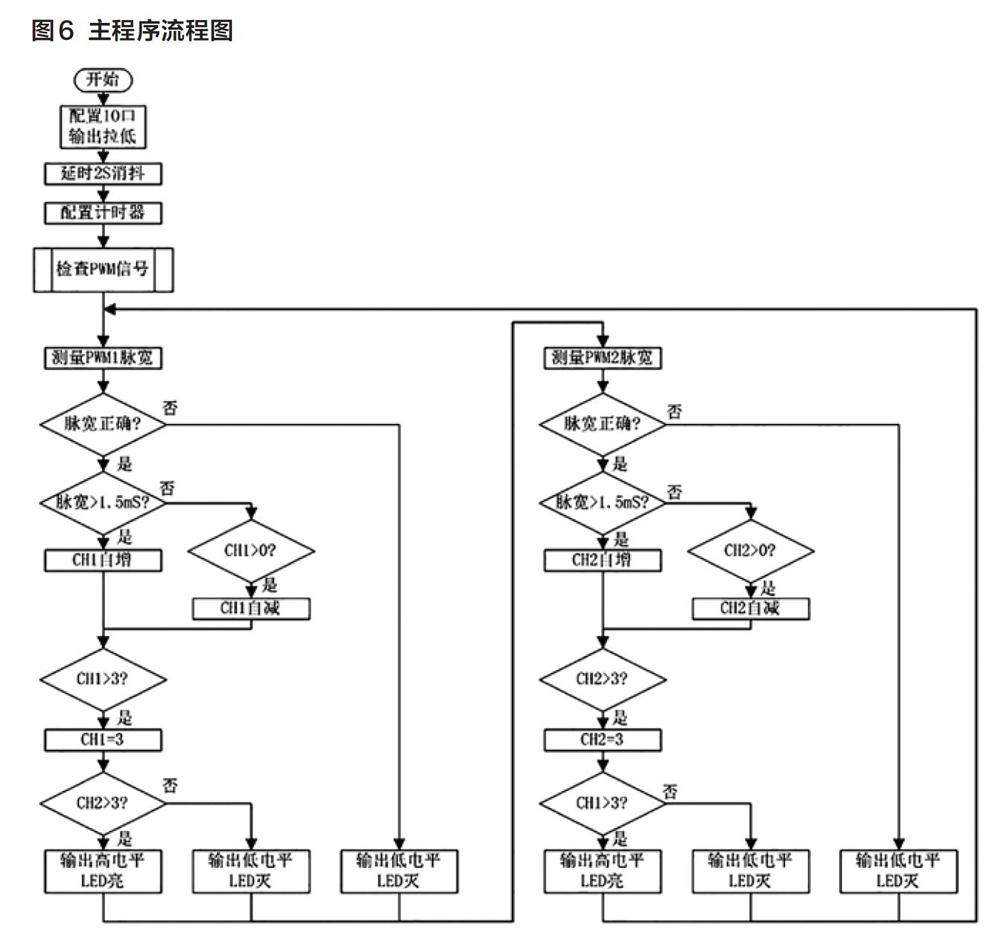
主程序设计
主程序流程图如图6所示。上电后先配置IO口,把输出拉低。然后延时2s,防止因带电插拔造成信号抖动产生误判。延时结束后配置计时器,计时器1计数模式,计时器2定时中断模式。配置完成后,运行检查PWM信号子程序,判断PWM1及PWM2是否有信号,无信号或者脉宽大于1.5ms时执行空循环,直到两路PWM都有信号,且两路PWM信号都小于1.5ms才继续往下运行。以避免因接线问题信号不通,或者遥控器开关未关闭信号一直有效,上电后继电器直接吸合造成危险。为保证安全,检查PWM信号子程序可以运行多次,以确保无误。当两路信号都正常且脉宽小于1.5ms时,进入程序主循环。
在主循环中,依次测量并判断PWM脉宽。为了避免异常脉冲信号的干扰,对收到的大于1.5ms的脈冲进行计数。当两路PWM信号都连续收到了至少3个大于1.5ms的脉冲,才输出高电平并且点亮LED指示灯,否则关闭输出和LED。
脉宽测量程序段如下。采用等待计时的方法测量脉冲宽度。PWM信号的高电平脉宽为有效信号量,但硬件电路中PWM信号先经过了反向输出的施密特触发器,信号电平已经被反向,所以应该测量低电平的脉冲宽度。
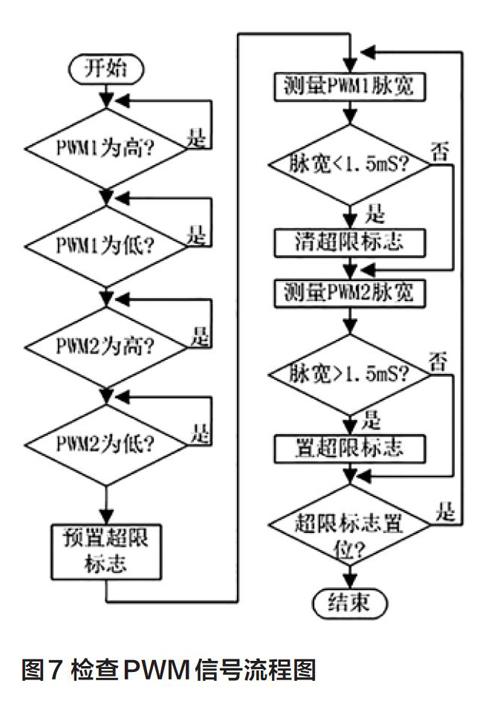
检查PWM信号子程序
检查PWM信号子程序流程图如图7所示。该子程序主要完成两路PWM信号有无的检验,以及信号脉宽的测量与判断。无PWM信号时,电平不跳变,主程序不再向下运行。LED指示灯在定时器2中断函数的控制下闪烁,提示未收到信号。信号有无检验通过后,程序将测量每一路PWM信号的脉宽。先预置超限标志,假设信号有误。检测到第一路PWM信号脉宽小于1.5ms,即PWM信号为正常的无效信号时,清信号超限标志位。接着检测第二路PWM信号,若脉宽大于1.5ms,即PWM信号为有效触发信号时,置信号超限标志函数。如果第二路PWM信号脉宽小于1.5ms,不改变信号超限标志函数的状态。当两次脉宽测量结束后,如果信号超限标志函数置位,将进入下一轮测量脉宽的循环,直到两路脉冲都检测到正常的无效信号,才退出循环,结束子程序。这样的脉冲检查对于信号断线、开关忘关等意外情况具有很好的保护作用。尤其是对有效信号的检测,上电时必须两路开关都处于关闭状态,程序才能正常向下运行。保证了上电瞬间不会因为忘关开关而误触发。
计时器2中断处理函数
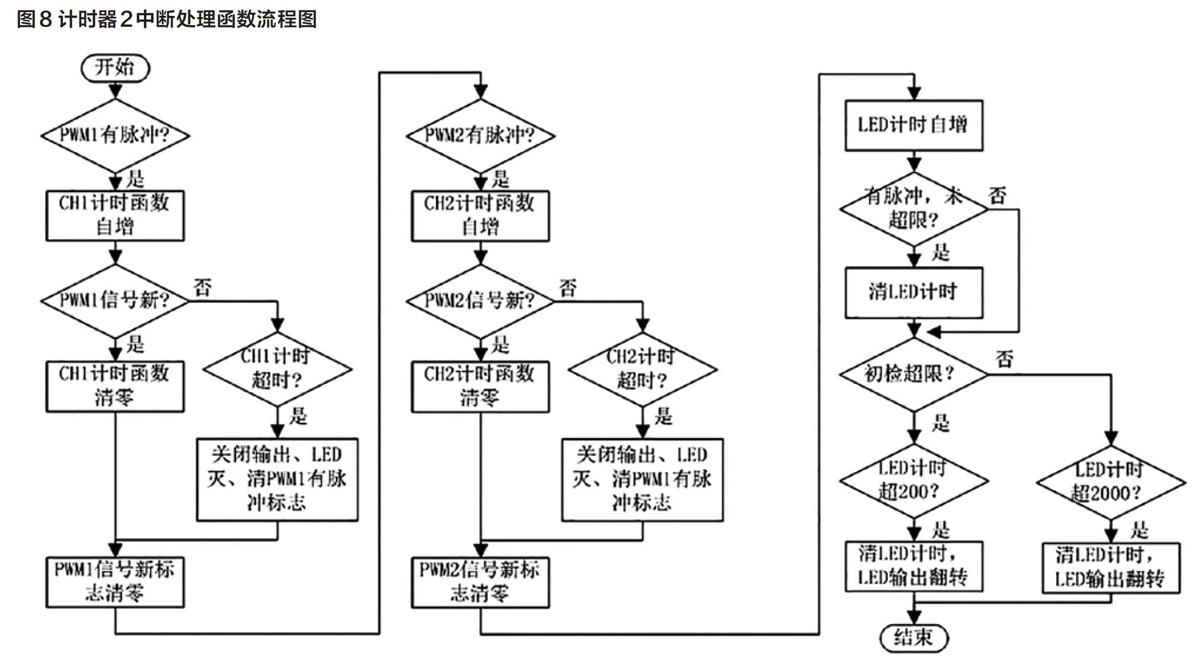
计时器2中断处理函数流程图如图8所示,完成脉冲接收超时判断以及故障状态LED灯闪烁的计时。
进入中断处理函数后,首先检查有脉冲标志函数,如果有脉冲函数为有效计时函数自增。然后检查PWM信号为新标志,如果为新收到的计时函数清零,如果不为新,即在上一个计时器中断间隔内没有检测到新的PWM脉冲,就判断计时是否超时,如果超时就关闭输出和LED并清有脉冲标志。判断结束后,清信号为新标志。两路PWM信号的计时操作相同,只是用到的变量不同。中断函数里用到的有脉冲标志以及信号为新标志都是全局变量,在主程序PWM脉宽检测中当检测顺利完成后置位。而中断处理函数中用到的计时和计数变量也都声明为全局变量,每次进入中断其值不会被重置可以连续计数。
完成脉冲接收超时判断后,LED计时变量自增,然后判断两路PWM信号的有脉冲标志,以及在检查PWM信号子函数中得到的脉冲宽度超限标志。如果脉冲正常且上电时脉冲宽度都未超限,就清零LED计时变量。然后判断超限标志,看是否是上电后对PWM的初检未通过。如果是初检未通过,判断LED计时是否计满200,如果计数满清计数LED输出反转,重复进入中断可以使LED以较快的速度闪烁。如果不是初检未通过,判断LED计数是否满2000,如果计数满2000清计数LED输出反转,LED将以较慢的速度闪烁,提示缺PWM信号。调试与应用
程序编译通过后,用STC-ISP软件烧录入单片机,用信号发生器模拟接收机PWM信号输入模块的信号输入端。经测定,当上电后PWM脉宽大于1.5ms或无信号时指示灯闪烁,继电器无动作。上电后两路PWM脉宽均在0.5ms至1.5ms之间时,调整两路脉冲宽度大于1.5Ms,继电器吸和。调小脉冲宽度,当任一路PWM信号小于1.5ms时继电器断开。实现了设计的继电器控制及出错保护等功能。目前此模块已经用于我公司蚊子直升机无人化改装中发动机启动熄火控制、消防灭火火箭弹打靶测试实验中推进火箭点火,极大地提高了初期验证实验的安全性,避免了误启动、误点火等意外情况发生。该模块结构简单,成本低廉,使用灵活方便,具有较完善的保护措施,在航空模型及无人飞行器的设备遥控.发动机启停控制、拉烟点火等火工品控制场合都有广泛的应用前景。
猜你喜欢
科学导报(2021年7期)2021-02-22
儿童故事画报·自然探秘(2017年3期)2017-06-29
晚晴(2016年11期)2016-12-20
哈尔滨理工大学学报(2014年3期)2015-01-04
语文世界(小学版)(2014年3期)2014-08-02
销售与市场·管理版(2009年21期)2009-09-03
小学生导刊(中年级)(2007年5期)2007-07-03