
履带机器人越沟壑性能分析
2020-07-22 06:45王亚翔刘满禄张俊俊
机械设计与制造 2020年7期
王亚翔,刘满禄,张俊俊,张 华
(西南科技大学特殊环境机器人技术四川省重点实验室,四川 绵阳 621010)
1 引言
移动机器人可携带多种载荷进入危险或未知的环境执行任务,适用于生产、国防和科学研究等多个领域,已经在空间探测、灾害救援、防暴反恐、消防救险等任务中发挥重要作用[1]。采用履带结构的移动平台,在爬越坡面、跨越障碍和壕沟以及在湿地、碎石地、泥泞地上行走时比轮式结构更具有优越性[2-3]。
为了使机器人更好地适应环境、明确机器人能够适应的障碍极限,有必要对其环境的适应性和极限性进行研究,以方便实际应用中设计合理的机器人结构并明确对机器人的操作和控制[4-10]。沟壑是复杂危险环境中常见的障碍物,而履带机器人对于沟壑具有较强的通过能力。但是其结构的设计和结构的参数对其跨越沟壑能力有较明显的影响。为了提高和优化履带机器人的跨越沟壑能力,文章根据自行设计制作的履带式机器人地盘为模型,通过理论分析研究履带机器人跨越沟壑的极限能力,同时利用Recurdyn 软件的Track(LM)工具建立移动平台的虚拟样机模型并使用Recurdyn 的仿真、分析功能,研究并优化了履带机器人的跨越沟壑的临界宽度。
2 履带机器人结构
设计的危险环境侦查履带机器人机构,如图1 所示。
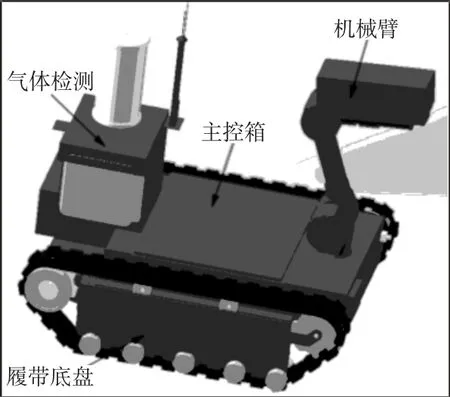
图1 履带机器人结构图Fig.1 Structure of Crawler Robot
主要结构由履带底盘、机械臂、主控箱、气体检测设备组成。其中机械臂拥有三个自由度,其装备了摄像机用于侦查任务,履带底盘为了增强越障能力,因此将其设计为梯形结构。气体检测装置用于检测危险气体,主控箱内安装有机器人整体的控制元器件,履带机器人参数,如表1 所示。

表1 履带机器人参数Tab.1 Parameters of Crawler Robot
3 履带跨越沟壑分析
沟壑是履带机器人运行过程中常见的地形,履带机器人的结构、重心等参数是影响其跨越沟壑的关键因素。设计的履带机器人跨越最宽沟壑情况,如图2 所示。其中,过程(b)和(d)是履带机器人能跨越最宽沟壑的关键阶段。

图2 履带跨越沟壑过程图Fig.2 The Process Diagram of Crawler Robot in Crossing Gully
3.1 越沟壑阶段1 分析
当履带机器人其重心位置达到沟壑边界线,而前端诱导轮处还未接触沟壑另一边界时,机器人开始倾斜。若此时机器人匀速前进,则下落过程可近似看成平抛运动。机器人在倾斜过程中,诱导轮端到达沟壑另一边,支撑住机器人.如果履带机器人在力的作用下可以从倾斜状态恢复到水平状态,则机器人就能跨越沟壑.根据沟壑宽度的不同,存在两种情况,如图3 所示。

图3 履带机器人跨越沟壑阶段1 受力分析图Fig.3 Stage 1 Force Analysis Diagram of Crawler Robot in Crossing Gully
在履带越沟壑阶段1 过程中,图3(a)履带机器人力和力矩平衡为:

图3(b)履带机器人力和力矩平衡为:
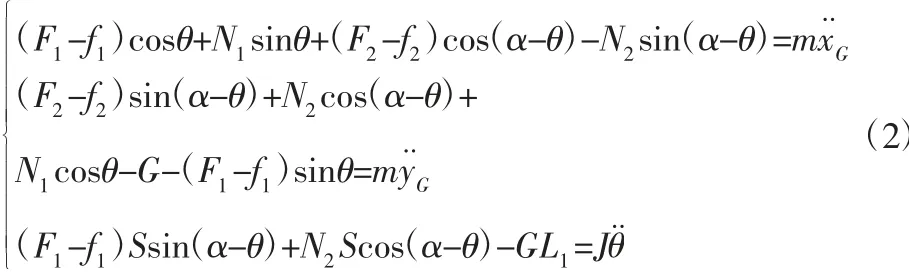
式中:F1、F2—履带机器人有效牵引力;f1、f2—履带机器人受到的行驶阻力,f1=uN1,f2=uN2;u—滚动阻力系数;N1、N2—履带受到支撑力;G—机器人受到的重力,m—履带机器人质量;J—履带机器人转动惯量;S—沟壑宽度;L—履带主动轮与诱导轮中心距;L1—履带重心与沟壑边界距离;θ—履带机器人倾斜后与水平面夹角;α—履带前角;xG、yG—履带机器人质心坐标,坐标原点为主动轮中心。
机器人若能在(a)情况中顺利越过沟壑则在(b)情况中必能跨越过沟壑;若机器人能够顺利跨越过沟壑,在图(a)状态中应该满足条件:x¨G>0;y¨G>0;θ¨>0,同时为了保证在图中位置不应打滑,应满足有效牵引力不能大于最大牵引力,即:

式中:φ—内摩擦角,根据使用环境取值为33°。
为了测量临界值,假设机器人匀速前进,在其临界位置时,加速度为零,在F2=N2tanφ 的条件下,求解F1≤N1tanφ,得出履带机器人跨越沟壑的临界值为:

式中:R—主动轮和诱导轮半径。
同时根据图3(a)可以得出几何条件为:

式中:v—履带机器人前进速度;H—履带底盘高度。
由式(1)-式(5)我们可以得出阶段1 履带机器人跨越沟壑的可行性区域和对应的速度曲线图,如图4 所示。

图4 阶段1 跨越沟壑的临界值Fig.4 Gully Critical Value of Stage 1
可以从式(1)、式(2)得出,履带机器人跨越沟壑的最大宽度和跨越沟壑所需驱动转矩均与行驶速度、重心位置、整体长度和轮径有关,而在跨越过临界宽度后其越沟壑时所受的力会与履带前角α 相关。跨越沟壑的宽度与质心变化,如图5 所示。在跨越沟壑的阶段1 过程中,能跨越的沟壑临界宽度与质心横纵坐标均有关系,但其横坐标影响最大,并且机器人质心越靠后,能跨越的沟壑宽度越大。

图5 阶段1 跨越沟壑临界宽度随质心变化Fig.5 The Critical Value of Stage 1 Crossing Gully Varies with Centroid
3.2 越沟壑阶段2 分析
当履带机器人进入越沟壑阶段2 时,跨越沟壑过程分别如图6(a)和图6(b)所示两种情况。若履带机器人能成功翻越,需要重心过履带与接触点台阶,(b)情况为重心在过台阶,后方主动轮刚脱离台阶时。若情况(b)能跨越沟壑成功,则情况(a)也能跨越沟壑。

图6 履带机器人越沟壑阶段2 受力分析图Fig.6 Stage 2 Force Analysis Diagram of Crawler Robot in Crossing Gully
在履带越沟壑阶段2 过程中,图6(a)履带机器人力和力矩平衡为:
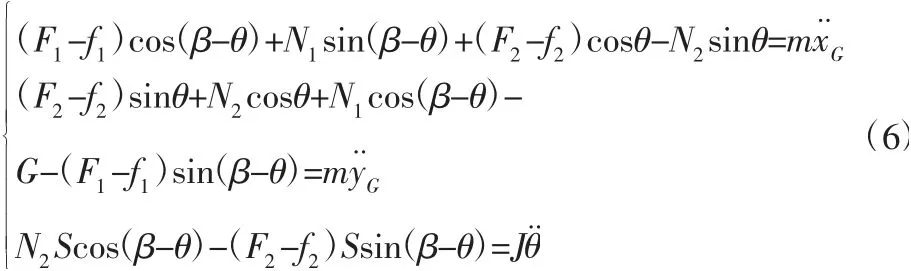
可以得出沟壑宽度为:

式中:β—履带机器人后角;γ—主动轮中心到履带与台阶接触的夹角,tanγ=R/L’,L’∈(0,L),L=Hcscβ-R。
根据临界条件,情况(b)中只受到单边沟壑作用,此时不打滑条件为:

可以履带机器人不打滑条件为:

由式(7)-式(9)和St≥xG 可以得出履带机器人能跨越的临界沟壑宽度St如图7 所示,显然最大值为在dSt/dθ=0 时。根据自行设计的履带机器人参数,得出其跨越沟壑临界宽度为530mm。根据库纳研究的履带越障性能,当质心位于L+0.7(R1+R2)的一半时,则履带可跨越过的障碍宽度为:


图7 跨越沟壑阶段2 临界值Fig.7 Gully Critical Value of Stage 2
根据设计履带机器人尺寸得出Se=520mm,与计算值相接近。可以从图7 看出履带机器人在阶段2 跨越沟壑的临界宽度小于阶段1,说明在考虑履带机器人跨越沟壑能力时,需要着重分析越沟壑阶段2。履带机器人质心对越沟壑阶段2 的影响,如图8所示。可以从图4、5 与7、8 履带机器人其质心位置对其跨越沟壑能力有着一定的影响,横坐标的改变对两个阶段跨越沟壑均影响较大,而纵坐标对阶段2 影响较大,对阶段1 影响较小。由于阶段1 能跨越的沟壑临界宽度比阶段2 大,且阶段2 是决定机器人是否能跨越最大沟壑宽度的阶段,因此为了提高履带机器人越沟壑能力,越沟壑时需要保持履带机器人较前和较低的重心位置。


图8 阶段2 越沟壑宽度随质心变化Fig.8 The Critical Value of Stage 2 Crossing Gully Varies with Centroid
4 仿真与实验分析
4.1 Recurdyn 模型仿真
为了更加可靠的分析履带机器人质心位置对跨越沟壑能力的影响,通过在Recurdyn 中建立的履带模型,并通改变质心位置和沟壑宽度来研究质心的改变对跨越沟壑能力的影响,同时研究了以不同质心跨越沟壑中所需要的转矩。仿真中得到的以同一速度,不同质心横轴位置能跨越过的沟壑临界值,如表2 所示。不同质心纵轴位置能跨越过的沟壑临界值,如表2 所示。质心位置为库纳的质心计算L+0.7(R1+R2)的一半,并依次增大横坐标值。履带机器人跨越沟壑质心横轴方向变化与所需扭矩变化,如图9(a)所示。纵轴方向变化与所需扭矩变化,如图9(b)所示。图中质心位置下落和上升两个阶段分别为够沟壑的阶段1 和阶段2。
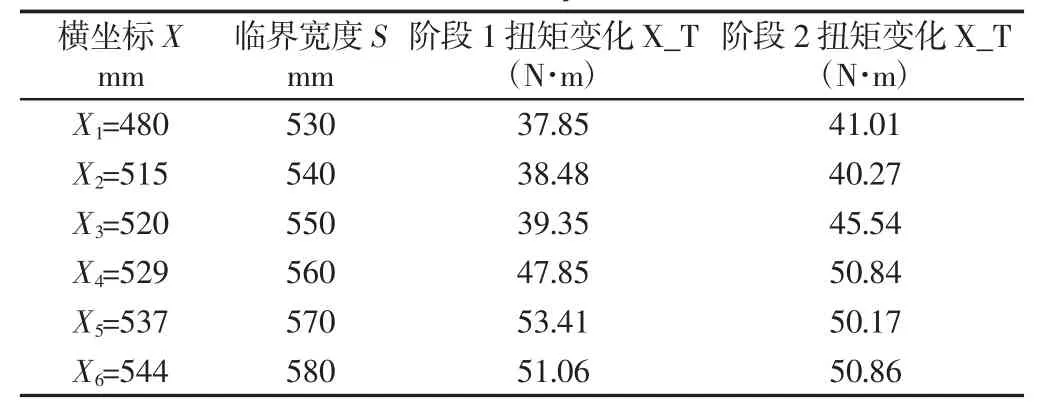
表2 不同质心横坐标位置的沟壑临界值Tab.2 The Critical Value of Gully at Different Centroid Axis

表3 不同质心纵坐标位置的沟壑临界值Tab.3 The Critical Value of Gully at Different Centroid Ordinate
从表2 和表3 可以看出,当履带机器人跨越沟壑时,其能跨越的极限沟壑宽度与其本身质心相关;当以主动轮为坐标原点时,质心的横坐标越大即质心越靠前,其跨越沟壑的能力越强;质心的纵坐标越向下,其越沟壑能力越强。同时可以从式(1)和式(6)与仿真结果中得出由于质心的横坐标的变大,使机器人跨越沟壑阶段时所需转矩增大,使得跨越沟壑时变得更加困难。

图9 越沟壑所需扭矩和质心变化图Fig.9The Torque and Centroid Changes in Crossing Gully
4.2 样机实验
由于设计的履带机器人拥有一个重型机械臂,机械臂质量为整体机器人质量的1/4,改变其机械臂姿态可以改变整体履带机器人的质心位置。本实验通过改变机械臂的姿态来调整履带机器人的质心位置。通过以不同机械臂姿态越障,观察履带机器人能跨越沟壑的临界跨度。实验过程,如图10 所示。实验所测得越沟壑平均宽度值,如表4 所示。实验中发现履带机器人阶段1 能跨越沟壑的临界宽度大于阶段2 能跨越沟壑的临界宽度,说明履带机器人能跨越沟壑的临界跨度值是由阶段2 决定的,实验结果与理论分析相一致。实验中测试所得数据与仿真有一定的误差是由于实验中跨越沟壑时机体本身产生的振动与履带变形和履带不断变化的张紧力引起,并且在实验中将机械臂升高的过程中,由于质心的变高导致机体振动的加剧,使实验越沟壑与仿真越沟壑误差增大。

表4 实验中沟壑临界值Tab.4 The Critical Value of Gully in Experiment

图10 实验过程Fig.10 Experimental Process
5 结论
通过建立数学模型、理论分析、仿真以及实验,得出以下结论:
(1)建立了履带机器人跨越沟壑的运动学和动力学模型,根据跨越沟壑过程中需要满足的几何、履带不打滑和履带机器人不发生倾翻的约束条件,得到了履带机器人能跨越沟壑的临界宽度,并得出履带机器人跨越沟壑的极限能力是由跨越沟壑阶段2决定。
(2)建立了履带机器人仿真平台,分别进行了机器人不同质心位置的跨越沟壑的仿真实验,并分析了运动过程中所需驱动力矩的变化性。得出了当履带机器人质心越靠近前进方向的时候,能跨越沟壑能力变强,但是其所需的驱动转矩随之增大;降低履带机器人质心也能提高履带机器人越沟壑性能。同时通过实验验证了不同质心情况中履带机器人的跨越沟壑性能。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
中国宝玉石(2021年5期)2021-11-18
文萃报·周五版(2020年15期)2020-04-22
石油化工建设(2019年6期)2020-01-16
现代农机(2018年1期)2018-02-11
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
应用科技(2015年5期)2015-12-09
橡胶工业(2015年4期)2015-02-23
航天器工程(2014年5期)2014-03-11
