
基于Arduino的消防侦查小车设计
2020-07-22 09:54杨铠睿姜锐函徐红梅
电脑知识与技术 2020年11期
杨铠睿 姜锐函 徐红梅


摘要:针对发生火灾或煤气泄漏时因火势凶猛或有毒气体浓度过高导致救援人員不能及时进入现场的问题,设计一种基于Arduino单片机的侦查小车。小车能够不受恶劣环境影响,通过自动循迹或远程遥控的方法迅速进入现场,利用烟雾传感器测量现场烟雾浓度,通过WiFi模块将内部情况传回控制端,为救援人员快速制定救援方案提供准确信息,在保障救援人员安全的同时提高救援效率。
关键词:Arduino;WiFi模块;红外传感器;烟雾传感器
中图分类号:TP319 文献标识码:A
随着社会的高速发展,城市中火灾频繁发生,危害人民的生命财产安全,同时也给消防人员带来了巨大的挑战。发生火灾时现场环境复杂,且存在大量燃烧产生的有毒气体,对救援人员的人身安全造成威胁,影响救援效率。为此设计一款以Arduino单片机为核心的侦查小车,使其能够进入存在较大危险的场景,实时探测内部情况并传回控制端;同时设计一款控制界面,能够通过WiFi连接远程控制小车,确保侦查过程的可靠性。智能侦查小车为救援人员快速制定救援方案提供了准确信息,使得救援更具针对性,大大提高救援效率。
1侦查小车整体设计
小车由Arduino单片机、驱动模块、循迹模块、避障模块、传感器模块、WiFi模块、摄像模块组成,具有自动避障、自动循迹、实时传输内部环境情况检测气体和烟雾浓度是否正常等功能。侦查小车系统总体框图如图1所示。
小车以Arduino单片机为核心,处理相关信息;以L293D芯片为驱动,控制小车的移动和转向;通过红外避障模块检测小车四周是否有障碍,红外循迹模块可以使小车沿着特定的路线前进;MQ-5烟雾传感器,提供内部环境可燃气体的浓度情况;云台的摄像头观察火场四周环境;通过自主设计的上位机显示内部气体浓度情况和摄像头拍摄到的画面,并可以实现控制小车的运动以及云台的方向;WiFi模块实时进行上位机与单片机的信息交互;采用履带行动,可以较好地适应各种地面,越过障碍物;外部罩有防火材料制作的外壳,可以保障内部器件的正常运作。
2侦查小车硬件部分设计
2.1驱动模块
本文选择Arduino单片机作为小车的核心处理器,因为Arduino编程的开发环境简洁,库函数丰富,易于使用。同时Arduino是开源硬件,便于功能的扩展,节约学习成本。
Arduino单片机的I/O端口驱动能力有限,为提高小车行进速度和在上坡等复杂地形有足够动力,采用L293D作为驱动模块来驱动电机,以PWM方式控制电机转速从而控制小车行进方向和速度。
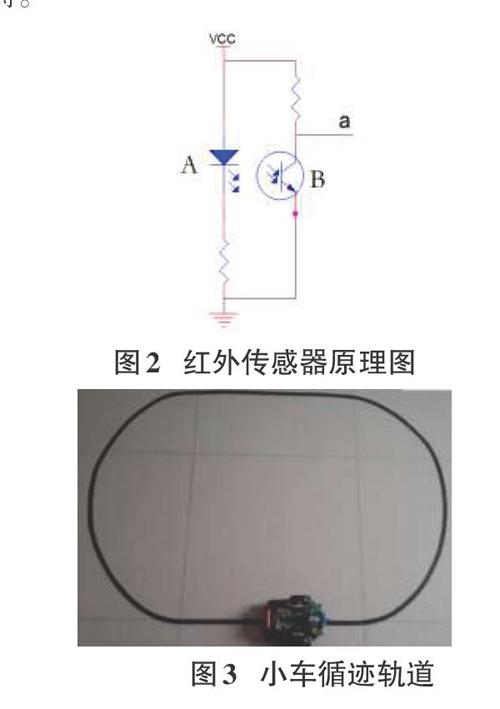
2.2红外传感器
避障模块和循迹模块采用红外传感器,原理图如图2所示,图中A为红外管,B为光敏三极管。该模块有三个引脚,VCC接+5V电源,GND接电源负极,OUT为信号输出端。在小车的前端安装两个朝向前方的红外传感器作为避障模块,避障模块的工作原理是:前方有障碍时,红外管发出的红外线被障碍反射,反射回的红外线使光敏三极管导通,a点输出电压为低电平;当前方没有障碍时红外线不会反射,此时光敏三极管截止,a点输出电压为高电平,由此可以根据输出电平判断前方是否有障碍。
在小车的前端安装两个朝向地面的红外传感器作为循迹模块,小车循迹的功能是在如图3所示的黑色轨道上实现的。寻迹模块的工作原理是:当小车在轨道上行驶时,红外管发出的光被白色地面反射使光敏三极管导通,a点输出电压为低电平;当小车偏离轨道时,左侧或右侧的红外管发出的红外线被黑色轨迹吸收,导致光敏三极管截止,a点输出电压为高电平。单片机实时检测两个传感器的输出电压,并根据输出电压调整小车运动方向。
2.3烟雾传感器
小车采用MQ-5传感器,主要检测空气中的液化气、甲烷等可燃气体含量。工作流程是将传感器模拟信号进行A/D转换,转换为数字电压信号,再通过WiFi传输至终端。为实现精准A/D转换,根据如图4所示MQ-5传感器的灵敏度特性曲线,分析传感器参数与气体浓度的关系。图中横坐标为气体浓度,纵坐标为传感器在不同浓度气体中的电阻值与传感器在洁净空气中的电阻值之比。由图可以看出,空气中可燃气体的浓度越高,传感器的电导率越大。为实现电导与输出电压的转换,设计如图5所示电路,烟雾浓度发生变化时,输出电压Uo将随传感器的电导变化。
由于气敏元件内阻很小,在刚接通时难以达到稳定状态,所以在使用MQ-5模块时,需预热一段时间再开始测量,以减少误差。
2.4WiFi模块
WiFi模块使用ESP8266芯片,因为ESP8266芯片高度集成,仅需极少的外部电路即可实现所需功能,从而减小小车体积。通过WiFi连接可以控制小车的行进,同时小车也能够传回现场的画面和有毒气体浓度。
3侦查小车软件部分设计
利用Visual Basic软件制作如图6所示控制界面。
在控制界面可以切换小车的行进方式,有手动遥控和自动循迹两种方式。控制界面上显示火场的实时烟雾浓度和摄像机拍摄的现场画面,同时还可以遥控搭载摄像头的云台的角度,便于消防人员详细观察火场内部情况。
4总结
本文设计了一种基于Arduino单片机的消防侦查小车,装载L239D驱动芯片、MQ-5烟雾传感器以及ESP8266芯片,能够通过WiFi远程遥控小车进入火场,并且实时传回现场画面和烟雾浓度,必要时小车还可以利用红外传感器进行自动循迹避障。在一定程度上保障了消防人员的安全,同时提高了救援效率。
