GIS设备内部检查机器人的模块化设计及实现
2020-07-23 03:35马飞越魏莹吴慧牛勃陈磊
宁夏电力 2020年2期
马飞越,魏莹,吴慧,牛勃,陈磊
(国网宁夏电力有限公司电力科学研究院,宁夏 银川 750011)
气体绝缘封闭开关设备(gas insulated switchgear,GIS)是由断路器、互感器、隔离开关、母线等元件组成的全部封闭在金属接地外壳中的高压装置[1-2]。近年来GIS设备装用量迅速增长,GIS设备引发的故障占比逐年上升[3-4]。对某公司系统近10年组合电器故障情况进行统计,363 kV及以上GIS设备84次故障跳闸中异物放电占比最高为50%,主要原因为GIS腔体内存在异物颗粒或者碎屑杂质引起放电[5-6]。GIS设备内部异物颗粒指混入设备产品里的除GIS内部材质及部件以外的物质。在组合电器GIS产品的设备制造过程、厂内装配过程、运输过程和现场安装过程中内部异物清理不到位,或GIS设备投入运行之后,异物在机械振动及电场作用下,逐渐暴露出来导致GIS内部闪络、绝缘击穿等故障[7-8]。
随着GIS设备局部放电带电检测技术的应用,超声波、特高频局放等带电检测技术已能有效检测出设备内部异物颗粒缺陷,基于X射线的缺陷检测方式也可有效地实现GIS设备内部可视化和罐体内部异物检测[9],但现有的方法未提出有效的异物清理方法,为了保证GIS设备的正常运行,需要将检测出来的异物进行彻底清理,防止设备内部电场畸变造成击穿。由于GIS母线或分支母线2个手孔之间的距离较大,在现场实际多采用解体检查、吸尘器清理及人工擦拭的方式进行检修。人工处理对于操作人员的技术素养要求很高,现场难以确保腔体深处检查的效果,当存在微小异物缺陷时也难以处理彻底;另一方面,当设备内部出现故障时,检修人员进行解体检查会受到电弧产生有毒的气体分解产物或附着在设备表面的固体分解产物侵袭,存在腔体内中毒的危险,因此,本文针对GIS设备内部检查及清理的问题,研发了基于模块化设计的GIS设备内部智能检查清理机器人,不仅实现了110 kV及以上GIS设备手孔部位进去工作的目的,采用模块化设计,减小了GIS设备机器人本体尺寸的同时,结合不同GIS设备作业场景实现设备内部检查清理及环境监测的功能,提升GIS设备检修的效率及安全性。
1 GIS内部机器人整体模块化设计
为满足GIS设备内部机器人能够实现110 kV及以上GIS设备手孔部位进入的需求,同时还需实现GIS设备内部异物的状态检查,内部有毒气体的环境监测及满足柔性关节狭小区域检查可视的功能,GIS设备内部机器人采用模块化设计,主要包括柔性机械臂模块,环境检测模块及异物清理模块。每个模块相互独立,并且采用统一的固定接口与电气接口,根据现场应用场合选择对应的模块,达到机器人小型化及智能化的目的。GIS设备内部检查及清理机器人总体框架设计如图1所示。

图1 GIS设备内部机器人总体架构设计
图1中模块化设计的GIS设备内部智能检查机器人主要包括GIS设备内部智能检查机器人本体、绕线器、就地控制柜及上位机监控平台4部分。其中机器人由操作人员人工投放进入GIS腔体内部,机器人可无线控制工作,也可通过绕线器及就地控制柜通过复合线缆提供不间断电源供机器人在GIS腔体内部执行检查及异物清理任务。上位机监控平台可通过有线或无线的控制通讯方式对机器人进行实时的工作控制及状态监测。机器人主体装配模块化的柔性关节机械臂可实现GIS不同位置的无死角检查;装配模块化异物化清理装置可实现对GIS腔体内的异物清理及收集工作;装配模块化气体检测及环境感知模块可对GIS内部O2、SO2及H2S气体进行浓度检测,同时可通过模块上的VR相机对GIS腔体进行直观观察。机器人本体模块化设计结构如图2所示。
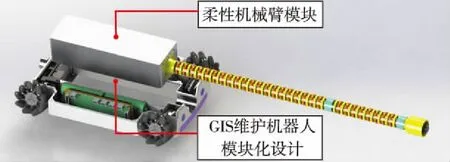
图2 GIS内部机器人模块化设计结构
为了保证机器人能够顺利进入待检GIS设备内部,在机器人设计过程中严格控制机器人的外型尺寸,最终设计的机器人本体尺寸长度为230 mm(不包含柔性机械臂长度),宽度为160 mm,高度为50 mm。在设计选材中,选用了高强度航空铝型材、尼龙等密度小的材料,它能大大减轻机器人的重量,机器人重量不超过3 kg。如图2所示,GIS设备检查机器人的模块化设计采用中部替换结构,不影响机器人两侧的电源系统及控制系统,其中机械臂模式模块用于通过上位机系统实现对机器人机械臂的控制,同时实现机械臂状态的显示,包括旋转角、弯曲角等,机械臂模块能采集与显示机械臂视频图像,实现异物的检测,还具有相机光源的分档位显示与控制等功能。环境检测模块用于实现对GIS设备腔体内环境检测模块检测到的实时数据的采集与显示,以及实现对各个环境检测参数的校正等功能。异物清扫模块用于实现对GIS腔体内检测到的异物进行清理,通过上位机可实现对异物的清扫设置,清扫强度的调节等功能。
2 柔性机械臂模块设计实现
GIS设备内部智能检查机器人主要功能之一是实现对GIS设备内部的可视化,采用传统布置于机器人本体的视觉采集方式局限性较大,受GIS设备内部粒子陷阱、支柱绝缘子等复杂环境的影响,部分区域无法控制本体达到可视的目的。为满足GIS腔体内不同腔体结构进行检查的需求,机器人配备柔性机械臂并能实现在GIS腔体任意位置检测的需求,避免现场视频采集单元的检查死角问题。
本文设计的GIS设备内部智能检查机器人柔性机械臂模块原理如图3,图4所示,其中设计的柔性机械臂直径为19 mm,总长度为350 mm。总体机械结构主要是由多个万向关节构成(每个万向关节具有2 自由度)、2个关节支撑圆盘、1个圆盘基座、6个丝杆电机和6根驱动线组成,整个机械臂中由2节记忆性合金弹簧支柱贯穿,机械臂外部均采用3D打印的聚酰胺(尼龙)材质,满足机器人的机械臂弯曲所需的结构条件。柔性机械臂的弹性体材料为弹性不锈钢金属材料,弹性体直径为14 mm,起着支撑柔性机械臂整体形状和提供柔性机械臂弯曲过程中所需要的“刚性支撑”的作用。装配柔性机械臂时利用了尼龙材料的弹性,采用卡扣式连接,使整个柔性机械臂上几乎没有连接螺栓,有效地减少了柔性机械臂的体积、减轻了自重,并提高了其快速响应能力和运动精度,使机器人柔性机械臂连接为1个整体,从根本上杜绝柔性机械臂掉落小型元件在GIS腔体的风险。在柔性机械臂前端安装有单目视觉传感器,可实现GIS设备腔体内全方位的视觉检查工作。
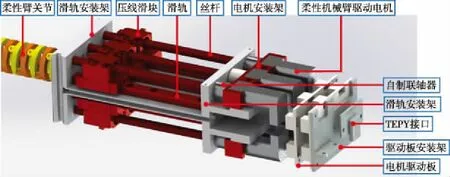
图3 机器人柔性机械臂模块
图4 柔性机械臂原理图解
针对柔性机械臂进行了力学、运动控制计算、仿真等理论分析验证后,对加工出的成品零件在设计理论验证的基础上进行实物测试,确保每个柔性关节的组成零部件满足要求。为验证在平面空间中柔性机械臂能够进行灵活的弯曲运动,对柔性机械臂柔性体进行了弯曲实验,通过直流电机驱动6根镍钛合金丝,驱动双关节柔性机械臂,从初始状态,到第1关节弯曲90°,再到第二关节弯曲-90°,最终可以看到柔性机械臂弯曲成“S”型形状,验证了柔性机械臂的弯曲能力。为了客观地展现空间连续型机械臂的空间弯曲状态和旋转状态,并验证其在三维空间具有较高的灵活性,根据柔性机械臂最终实物,进行了平面弯曲试验和空间弯曲旋转实验,通过对柔性机械臂的2级连续型关节进行联合弯曲旋转控制,实验状态如图5所示,相关弯曲旋转参数如表1所示,其中θ1代表第1关节弯曲度,θ2代表第2关节弯曲度,φ1代表第1关节旋转度,φ2代表第2关节旋转度。通过图5及表1参数对比可以看出,本文设计的柔性机械臂具有联合弯曲旋转能力,能够满足GIS内复杂环境可视化作业需求。
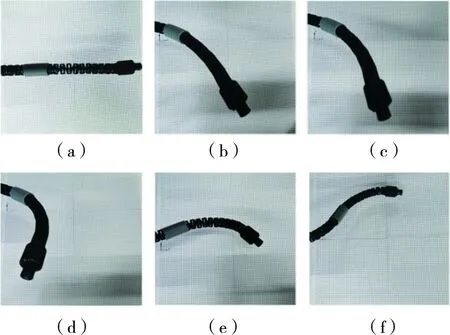
图5 机械臂空间弯曲实验
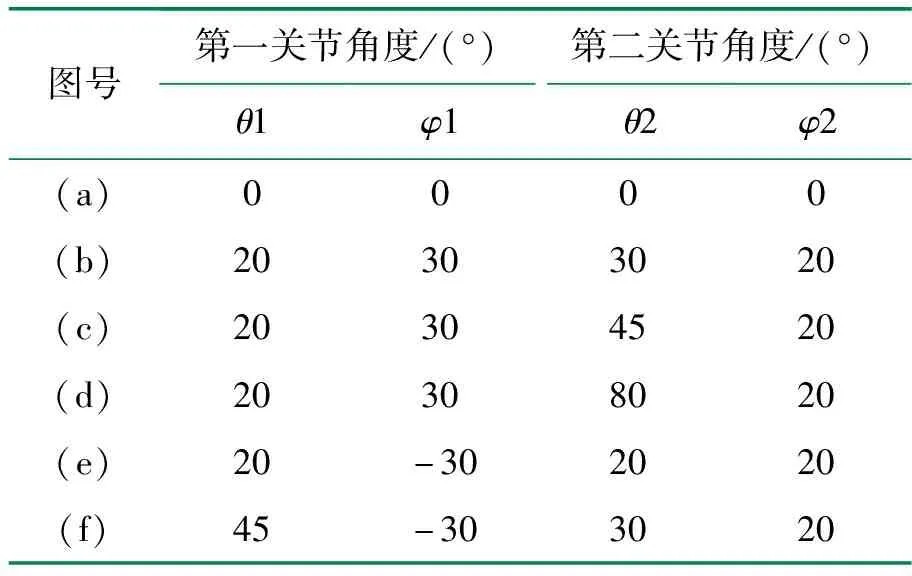
表1 机械臂弯曲参数
3 异物清理模块设计实现
当GIS设备内部发现异物的时候需要对内部进行清理,由于人工清理长度较长且狭小的罐体难以保证清理效果,因此,GIS设备检查机器人需配备异物清扫模块,具备在GIS腔体内清扫异物的能力,并且在搭载异物清扫模块的同时可与机器人本体的视觉采集图像进行联动,根据视觉采集图像的异物情况进行清理,同时清理后的效果可利用机器视觉进行检查,确保机器人能够有效彻底清理异物。
针对GIS内部毫米级异物的特点,对比滚动粘贴式,手臂抓取式异物清理功能,本文设计的GIS设备智能检查机器人异物清扫模块采用大吸力吸尘模块来实现,主要组成部分如图6所示。
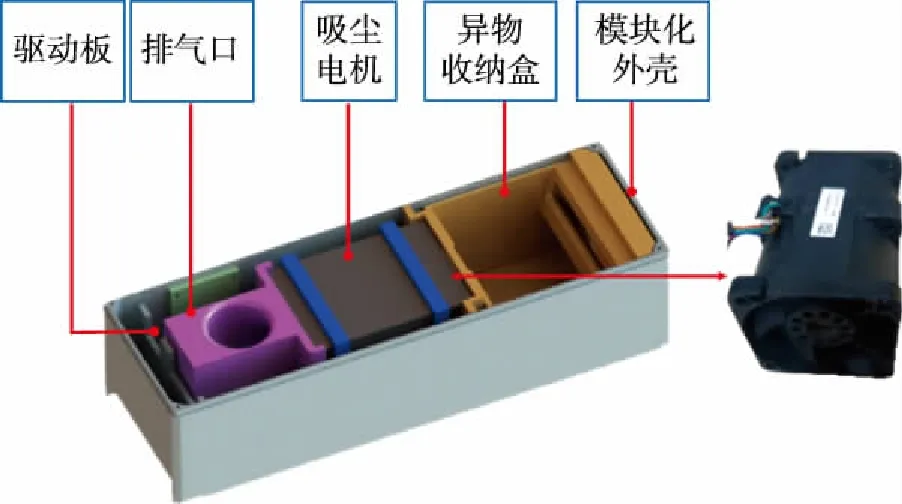
图6 异物清扫装置结构图解
图6中GIS异物清扫模块由外壳、异物收纳盒、吸尘电机、排气、驱动板等零部件组成。其中吸尘电机选用大风量涵道风机,这种常用于航模驱动的电机拥有着极大的风量,它有2个不同形状的叶片和2个12 V独立高转速电机,分别负责进气和排气,配合其高达18 000 r/min的转速,再加上涵道结构,使得它得到了与其体积不成比例的风量。异物收纳盒吸尘口采用止口的设计方式,有效地防止了异物通过进气口进入模块外壳内部的状况。为了零部件装配精度,异物收纳盒采用3D打印的制作方式制作,并选用未来7 100尼龙作为材料。因考虑到异物收纳盒使用时会频繁拆装,所以装配方式设计为卡扣,使得拆装方便,工作效率得到提高。吸尘电机前加装了滤网,有效地防止了异物通过排风口二次排出。
在真型363 kV GIS实验腔体内部对GIS检查机器人异物清理模块进行验证实验,验证效果如图7所示。图7中,(a)、(b)为以1 mm,5 mm不同大小的异物颗粒作为实验对象,图中蓝色小框为机器人自动识别判断内部存在的异物图像,图7(c)为机器人在设备内部检查清理的状态,图7(d)为机器人清理后异物清理模块异物收集盒内部情况,可以看出机器人异物清理模块能够实现腔体内部异物的清理并自动收集,防止异物再次掉落进入设备内部造成二次污染,保证异物彻底清理干净。

(a)1 mm异物颗粒 (b)5 mm异物颗粒
4 环境监测感知模块设计实现
GIS设备内部检查机器人不仅仅可实现设备缺陷处理时进行内部的检查清理工作,对于GIS设备故障现场能够提供辅助手段。当GIS设备内部故障时,由于断路器、隔离开关等设备特殊的结构,并且故障时巨大的电弧能量在罐体内部产生有毒的分解产物,人员无法第一时间进去设备内部进行查看,需要机器人进入设备内部查看,同时需配备气体检测模块和环境感知模块,并具备检测O2、SO2和H2S气体,通过VR模块获取第一视角影像的能力,实时感知设备内部状态,避免后续人员进去受到未扩散的有毒物质的影响。
GIS设备机器人设计的环境检测模块是1个可拆卸替换的独立功能模块,当机器人需要对所处的环境进行环境检测的时候只需要将此功能模块安装在机器人可替换模块上即可,环境检测模块的内部组成机构如图8所示。

图8 环境检测模块的内部组成结构图解
如图8所示设计的环境检测模块封装盒采用整块的7075航空铝合金铣削加工完成,封装盒的前端具有VR摄像头的安装架,用于安装VR摄像头,在环境检测模块封装盒前端靠近VR摄像头安装架的底部设计了用于VR模块驱动板安装的驱动板安装位,在环境检测模块封装盒内部的两侧分别设置了1组用于气体检测模组安装架。为了使所需检测的各种气体能够进入环境检测模块封装盒,在环境检测模块封装盒的底部设计了1组网状的底部进气口,封装盒的尾部设计了安装位,用于安装整个环境检测模块通讯供电的TYPE-C接头。在环境检测模块封装盒的顶盖上设计了1个天线安装位,使设计的环境检测模块具有无线通讯功能。
针对GIS设备内部分解产物特点及检修人员作业环境特点,环境监测感知模块具备O2、H2S、SO2的监测功能,并能将数据实时传输至主机显示。为验证机器人搭载的环境监测性能,进行机器人模拟试验验证。在实验腔体分别采用不同的气体环境进行模拟试验,分别准备17%、19%、23%的O2实验环境,15、25、35 μL/L的H2S实验环境,及5、10、15 μL/L的SO2实验环境。对上述3种气体进行检测测试,各进行15次测试,分为3组,每组5次,且每组测试之间将设备上下电置于通风处,上下电时间间隔为15 min。将每组内5次测试数据平均并进行绘图,观察数据的准确度,误差范围,测量时间等。测试结果如图9-图11所示,测量各成分误差如表2-表3所示,测试结果可以看出3种气体组分的测试误差均在2%以内,表明机器人搭载的环境感知模块可以满足现场GIS内部测试需求。

图9 O2测试数据
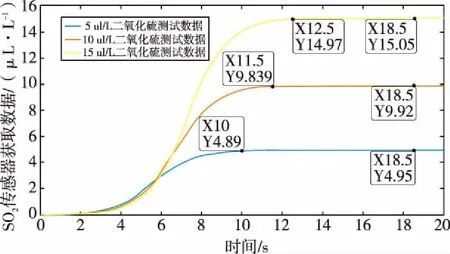
图10 SO2测试数据
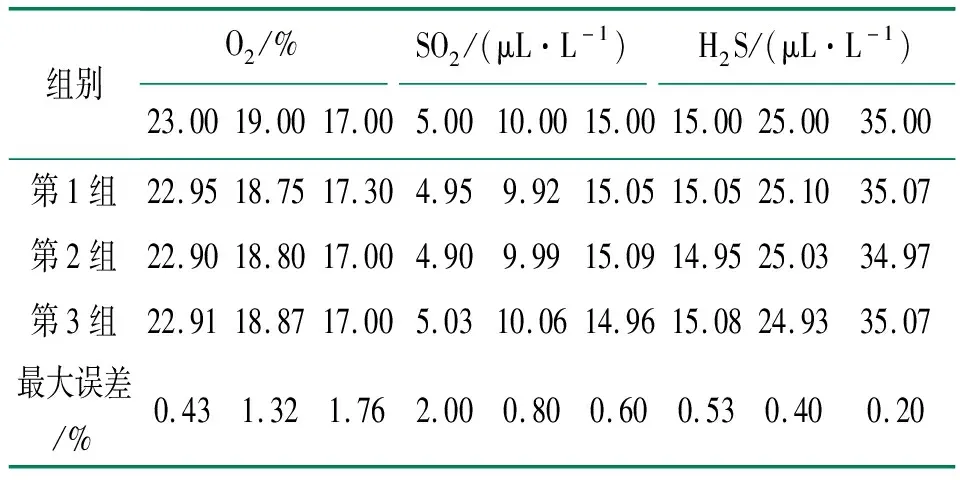
表2 环境监测成分测试数据
5 结 论
GIS设备内部智能检查机器人基于模块化技术设计了柔性机械臂模块、异物清扫模块及环境监测感知模块,各模块机械结构及接口相同,依据不同作业场所选择对应的功能模块。柔性机械臂模块采用双柔性臂结合作业模式,具有联合弯曲旋转能力,实验验证了平面空间中柔性机械臂能够进行灵活的弯曲运动,旋转角、弯曲角等参数满足GIS内部复杂环境作业要求;异物清扫模块采用大吸力吸尘模块实现对GIS腔体内异物的清理,通过上位机可实现异物的清扫参数设置,实验验证异物清理模块能够完全清理GIS腔体底部的不同类型微小异物;环境监测感知模块具备O2、H2S、SO2的监测功能,并能将数据实时传输至主机显示,机器人模拟实际环境试验验证模块能够实现对应检测成分的监测显示,并且各项检测误差均在2%以内,确保机器人对GIS设备内部的环境监测准确性。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
中老年保健(2021年9期)2021-08-24
昆明医科大学学报(2020年12期)2021-01-26
文化创新比较研究(2020年7期)2021-01-13
装备制造技术(2020年4期)2020-12-25
当代工人(2020年8期)2020-05-25
兽医导刊(2019年1期)2019-02-21
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25