
多通道表面肌电信号同步采样与处理研究
2020-07-23 06:27陈蕾林明星代成刚吴筱坚
现代电子技术 2020年4期
关键词:信号处理
陈蕾 林明星 代成刚 吴筱坚

摘 要: 在康复机器人的人机交互系统中,表面肌电信号(sEMG)发挥着重要作用。针对采集单通道的肌电信号已经不能满足获取更多信息量的需求,该文设计一个8通道的肌电信号同步采集系统。该系统包括表面电极贴片、仪表放大器、带通滤波与二级放大、50 Hz陷波器、同步采集ADC和无线蓝牙模块等部分。通过测试实验,该采集系统很好地采集了人体的表面肌电信号,有效去除了共模噪声和50 Hz的工频干扰。获取的同步肌电信号可以进一步用于人机交互系统的模式识别研究。
关键词: 表面肌电信号; 多通道信号; 同步采集; 信号处理; 人机交互系统; 系统测试
中图分类号: TN911.7?34 文献标识码: A 文章编号: 1004?373X(2020)04?0017?04
Synchronous sampling and processing of multi?channel surface myoelectric signal
CHEN Lei1, LIN MIngxing1,2, DAI Chenggang1, WU Xiaojian1,2
(1. School of Mechanical Engineering, Shandong University, Jinan 250061, China;
2. Key Laboratory of High?efficiency and Clean Mechanical Manufacture, Ministry of Education, Jinan 250061, China)
Abstract: Surface myoelectric signals (sEMG) play an important role in the human?computer interaction system of rehabilitation robot. As the single channel EMG signals has been unable to meet the need to obtain more information, an eight?channel myoelectric signal synchronous acquisition system is designed. The system includes surface electrode patch, instrumentation amplifier, bandpass filtering and secondary amplification, 50 Hz notch filter, synchronous acquisition ADC, wireless bluetooth module and so on. The testing experiment results show that the acquisition system can well collect the sEMG of human body and effectively eliminate the common mode noise and 50 Hz power frequency interference. The obtained synchronous myoelectric signals can be further used in the study of pattern recognition of human?computer interaction system.
Keywords: sEMG; multi?channel signal; synchronous collection; signal processing; human?computer interaction system; system testing
表面肌电信号(sEMG)是生物电信号之一[1?2],其信号是从骨骼肌中获得的,骨骼肌的收缩是由中枢神经系统和肌肉之间传播的电脉冲控制的。sEMG的幅值范围一般是0~5 mV,频谱主要分布在10~500 Hz。根据采样定理可知采样频率至少要达到1 000 Hz。sEMG在手势识别[3?4]、智能假肢[5?6]和康复机器人[7?8]领域有着广泛的应用。表面肌电信号是机器控制系统中人机交互的重要组成部分[9?10]。人机交互的目标是设计一个让人类可以更自然地与计算机或其他设备进行通信的控制系统。基于sEMG的控制系统一般分为4个阶段:数据采集与分割、特征提取、分类和控制器,阶段1也被称为信号调节和预处理。在这个过程中,信号从人体表面获得,并通过滤波放大获取有用信号,其中去除50 Hz的工频干扰是成功采集信号的关键。融合了生物控制技术的系统可以增强人机交互性,让机器有能力理解人类的意图。这项技术对于提高残疾人和老年人的生活质量非常有用。本文设计了一个8通道表面肌电信号同步采样系统,能够很好地采集信号并有效滤除噪聲干扰,并对采集的信号进行了初步处理。结果表明,该设计简单有效,降低了成本,具备很好的应用前景。
1 表面肌电信号同步采集系统设计
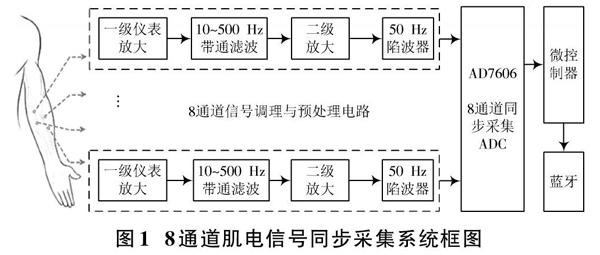
表面肌电信号使用电极片通过三线音频导线设计信号调理与预处理电路。其中两根线连接仪表放大器的差分输入,第三根线接公共地作为参考。为了避免放大噪声,采用两级放大结构。微弱肌电信号通过一级仪表放大器放大信号的同时有效地去除了共模干扰,然后通过带通滤波去除低频和高频干扰。由于10~500 Hz是窄带滤波,所以采用低通滤波器和高通滤波器串联构成。此时对去除共模干扰和高低频干扰的肌电信号进行二次放大,放大到适合ADC采集的0~5 V的电压范围。接着通过陷波器去除50 Hz的工频干扰,能否去除50 Hz的工频干扰是肌电信号采集系统的关键。肌电信号通过调理与预处理电路后达到了ADC采集的电压范围。AD7606是8通道同步采集ADC,将采集的信号通过SPI接口传输给微控制器,微控制器再通过蓝牙串口透传模式将数据传输给上位机。接着上位机就可以对采集到的肌电信号进行进一步处理。该系统原理框图如图1所示。
1.1 仪表放大电路设计
在实际的测量系统中,大多数放大器处理的是传感器输出的信号,而传感器产生的信号一般比较微弱,传感器的等效电阻也不是常量,从传感器来的信号常为差模小信号且含有较大的共模成分。为了放大这种信号,要求放大器除具有足够的放大倍数外,还要有较高的输入电阻和共模抑制比。仪表放大器就可以满足这样的设计要求。仪表放大器能够去除共模信号,同时又将差分信号放大。一级仪表放大电路如图2所示。
仪表放大器AD623的增益由接在芯片1脚和8脚之间的电阻[Rg]阻值大小决定。输入与输出关系如式(1)所示。信号采集电路采用二级放大设计,第一级是仪表放大器主要用于抑制微弱肌电中共模干扰,设计放大倍数为4,则电阻[Rg]阻值为33 kΩ。
[Vout=1+100 kΩRg·Vin] (1)
1.2 带通滤波与二级放大电路设计
为了克服无源滤波器通带放大倍数不能大于1,通带放大倍数和截止频率都随负载而变化的缺点。本设计采用有源滤波器设计,为了获取10~500 Hz信号,采用二阶低通和高通有源滤波器串联的方式。
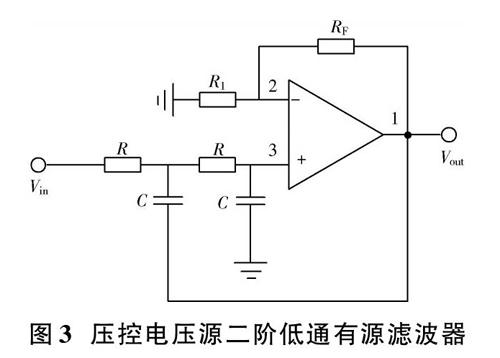
一阶低通有源滤波器的过渡带太宽,对数幅频特性的最大衰减斜率仅为-20 dB/十倍频。增加RC环节可以加大衰减斜率。二阶低通有源滤波器的衰减斜率达到-40 dB/十倍频。把第一级RC电路的电容不接地而改接到输出端,就构成了压控电压源二阶低通有源滤波器,如图3所示。
压控电压源二阶低通有源滤波器的通带放大倍数和通带截止频率[f0]都和一阶低通有源滤波电路相同。当[Q=1,f=f0]时,即可保证通频带的增益,而高频段幅频特性又能很快衰减,同时还避免了在[f=f0]处幅频特性产生一个较大的凸峰,因此滤波效果较好。
高通滤波电路与低通滤波电路具有对偶性,将图3中R和C互换就可以得到压控电压源二阶高通有源滤波电路。将去除共模干扰和高低频噪声的信号进行二级放大,放大到ADC的量程内。电路图原理图如图4所示。设计的二级放大倍数是1 046。
1.3 陷波器设计
陷波器设计的主体包括三部分:选频部分、放大器部分和反馈部分。设计时采用双T型带阻滤波器为基础并加入压控反馈得到。此陷波器具有良好的选频特性和比较高的Q值,电路原理图如图5所示。输入信号经过一个RC元件组成的双T选频网络,然后接至集成运算放大器的同向输入端。双T网络电路中,在上面支路中两个电容容量相等,均为C,两者之间电阻的阻值为[R2];在下面支路中两个电阻阻值相等,均为R,两者之间的电容的容量为2C。
双T型带阻陷波器的带宽BW和Q值如下:
[BW=fH-fL=41-mf0] (2)
[Q=f0fH-fL=141-m] (3)
式中:[m=R2R1+R2;f0=12πRC]。只要取m接近1时,就能得到窄带滤波效果和高Q值,使陷波器的性能达到最佳。根据设计原理,要使f0=50 Hz,并要求m值接近1,选择器件如下:C=33 nF,R=5.1 kΩ+91 kΩ,R1=5.1 kΩ,R2=91 kΩ,运算放大器选择NE5532。图5中,A1用作放大器,其输出端作为陷波器的输出;A2用作电压跟随器,与输出端组成电压反馈电路,在电路中引入正反馈。当信号频率趋于0时,由于电容的阻抗趋于无穷大,则正反馈很弱;当信号的频率很高时,由于电容的阻抗此时很小,因此C节点电压趋于0。因此只要正反馈引入得当,就可以使中心频率点的放大倍数增大,又不会出现自激振荡。
1.4 8通道同步采样ADC电路设计
AD7606是16位8通道同步采样模数数据采集系统。器件内置模拟输入钳位保护、二阶抗混叠滤波器、跟踪保持放大器、16位电荷再分配逐次逼近型模数转换器(ADC)、灵活的数字滤波器、2.5 V基准电压源、基准电压缓冲以及高速串行和并行接口。该设计中AD7606与微控制器之间采用SPI接口连接。输入范围设置成±5 V的范圍。使用同步采样ADC对来自信号调理与预处理电路的肌电信号进行模数转换,简化了多通道信号采集的设计,也使多路信号在时间上保持同步。这样采集到的表面肌电信号就能代表同一时刻的信息。
1.5 电源电路设计
该肌电信号采集系统需要±5 V和2.5 V电源。±5 V电源给滤波器和陷波器供电,2.5 V电源作为仪表放大器和二级放大的电压偏置。XL6008升压芯片的输入电压范围为3.6~32 V,XL6008的输出电压范围由式(4)决定。当R2=11 kΩ,R1=1 kΩ时,Vout=15 V。然后通过78M05和79M05稳压芯片产生±5 V电源。通过电阻分压和电压跟随器产生2.5 V电压。
[Vout=1.251+R2R1] (4)
2 信号处理
2.1 采集实验
表面肌电信号同步采样系统实物如图7所示。实验时将表面电极贴在右上臂的肱二头肌处。手臂做多次弯曲动作,将采集到的肌电信号通过上位机实时显示出来。采集到的信号如图8所示。系统的总放大倍数为4 186倍,测得的信号输出范围为-3~3 V。手臂静止时信号大约稳定在0 V且干扰较小,手臂动作时信号反应较明显。根据图8b)的幅频谱可以看出肌电信号的频率主要集中在0~500 Hz之间。
2.2 滤波去噪
经由肌电采集系统得到的原始肌电信号图8a)所示,采样间隔为465 μs,即采样频率为2 150 Hz。虽然肌电信号经过硬件电路上的滤波、去噪等一系列预处理,但仍然存在工频噪声、尖峰幅值等干扰。现在对取得的原始肌电信号进行软件滤波处理。对原始肌电信号进行离散FFT变换,得到单边幅频谱如图8b)所示,可以看出50 Hz的工频干扰较大。所以采用二阶IIR滤波器作为陷波器,其幅度响应在某一频率上为0,可以消除某个频率分量,如50 Hz的工频干扰。陷波后的频谱图如图8d)所示。
2.3 特征提取
采集肌电信号的目的就是获取其包含的信息,并将这些信息作为模式识别的分类模型的输入,完成人机交互的任务。常用肌电信号的特征有时域特征均方根(RMS)、方差(VAR)、过零点数(ZC)等;频域特征有中值频率、均值频率等;时频特征有小波包变换(WPT)、短时傅里叶变换(SFT)等。为了保证特征的连续性,采用设置时间窗+增量窗的方式提取特征。选择时间窗为2 000个采样点,增量窗为200个采样点。利用Hilbert变换求出原始信号的包络,如图9a)所示,可以清楚地看出肌电信号的活动段。使用移窗法求出原始肌电信号的均方根特征,如图9b)所示。信号的其余特征可以使用类似方法获得。肌电信号的这些特征可以用于人机交互的分类和控制器中。
3 结 语
本文设计的8通道表面肌电信号采样与处理系统具有体积小、成本低、无线数据传输和多通道肌电信号同步采集等优点。采集到的信号质量也很好,有效地抑制了共模噪声和工频干扰,并能实时将采集的数据传输给上位机。采集的肌电信号可以用于人机交互和模式识别的研究。因为多通道同步采样的特点,拥有很好的应用前景。如果使用多块AD7606芯片级联可以实现更多通道信号的同步采集,为研究更多通道肌电信号提供了有效途径。
参考文献
[1] DISSELHORST?KLUG C, SCHMITZ?RODE T, G?NTER R. Surface electromyography and muscle force: limits in sEMG?force relationship and new approaches for applications [J]. Clinical biomechanics, 2009, 24(3): 235.
[2] FARINA D. The extraction of neural strategies from the surface EMG [J]. Journal of applied physiology, 2004, 96(4): 1486?1495.
[3] ZHANG X, CHEN X, LI Y, et al. A framework for hand gesture recognition based on accelerometer and EMG sensors [J]. IEEE transactions on systems man & cybernetics part a systems & humans, 2011, 41(6): 1064?1076.
[4] BENATTI S, CASAMASSIMA F, MILOSEVIC B, et al. A versatile embedded platform for EMG acquisition and gesture recognition [J]. IEEE transactions on biomedical circuits and systems, 2015, 9(5): 1.
[5] FARNSWORTH B D, TALYOR D M , TRIOLO R J , et al. Wireless in vivo EMG sensor for intelligent prosthetic control [C]// International Solid?state Sensors, Actuators & Microsystems. Xian: IEEE, 2009: 33?37.
[6] CHAN F H Y, YANG Y S, LAM F K, et al. Fuzzy EMG classification for prosthesis control [J]. IEEE transactions on rehabilitation engineering, 2000, 8(3): 311.
[7] LI Q, WANG D, DU Z, et al. sEMG based control for 5 DOF upper limb rehabilitation robot system [C]// IEEE International Conference on Robotics and Biomimetics. Kunming: IEEE, 2006: 131?135.
[8] ZHOU Y, FANG Y, GUI K, et al. sEMG bias?driven functional electrical stimulation system for upper?limb stroke rehabilitation [J]. IEEE sensors journal, 2018, 18(16): 6812?6821.
[9] POO T S, SUNDARAJ K. Design and development of a low cost EMG signal acquisition system using surface EMG electrode [C]// 2010 IEEE Asia Pacific Conference on Circuits and Systems. Kuala Lumpur: IEEE, 2010: 1342?1435.
[10] KHAN M H, WAJDAN A, KHAN M, et al. Design of low cost and portable EMG circuitry for use in active prosthesis applications [C]// 2012 International Conference of Robotics and Artificial Intelligence. Rawalpindi: IEEE, 2012: 1?5.
猜你喜欢
信号处理(2018年1期)2018-08-20
信号处理(2018年1期)2018-08-20
信号处理(2018年4期)2018-08-20
信号处理(2018年4期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年9期)2018-07-26
信号处理(2018年9期)2018-07-26
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
