
基于单片机的多功能垃圾桶设计与试验
2020-07-24 07:48杨咸启解文辰
黄山学院学报 2020年3期
杨咸启,梦 伟,解文辰
(1.安徽建筑大学 城市建设学院, 安徽 合肥 238076; 2.黄山学院,安徽 黄山 245041)
1 研究背景及意义
随着现代科学技术的发展,人民生活水平不断提高,需要更安全、健康、和谐和舒适的生活环境。但是,目前无论室内还是室外,人们生活中都存在垃圾存放的问题。在公共场所或在家庭住宅中,使用的有盖垃圾桶大多都是需要手动打开。而无盖的垃圾桶存在更多的安全隐患,如散发出刺鼻的味道、会因细菌的滋生导致更多的疾病传播、没有完全掐灭的烟头丢进垃圾桶内从而引起火灾,等等。这些都可能给人们的生命及财产带来极大的危害,因此提供一个更便捷、更安全的垃圾存放设备就显得非常必要。本文介绍一种利用单片机控制的智能垃圾桶系统,该系统具有自动感应开盖与手动控制常开与关闭。通过红外传感器检测到当有人丢垃圾时自动打开垃圾桶盖,或者当有大量垃圾时可以按下常开键进行控制垃圾桶的盖子常开,能够判断垃圾桶内是否可能有燃烧,一旦发现便给出报警。当有可燃物在垃圾桶内燃烧时,利用垃圾桶内自带的水泵抽取桶内预先存放的水进行灭火。为了实现系统软件相应功能,对垃圾桶的硬件进行了完整的设计,同时制作出实物模型,验证了系统软件功能[1-4]。
2 系统功能设计
2.1 自动检测和翻盖功能
针对现有的有盖垃圾桶多为手动打开或者是用脚打开,不仅不能使垃圾与外界很好地隔离,使用起来也很不方便。对于用手开盖的垃圾桶来说,由于垃圾桶内外有细菌滋生,用手去触摸垃圾桶盖子的时候会沾染上细菌。为了避免这些问题,设计的多功能垃圾桶应具有自动检测和翻盖功能。
2.2 长开盖功能
当处理大量垃圾的时候或需要长时间放置垃圾的时候,自动翻盖设置时间不能过长。因此设计的垃圾桶应具有长时间开盖的功能。
2.3 自动灭火功能
在很多公共场所可能有未掐灭的烟头丢进垃圾桶,这有可能会导致火灾的发生,因此设计的垃圾桶应具有预防火灾功能,能够检测火源并进行自动扑灭。
3 系统控制部分硬件设计
3.1 总体系统模块设计
垃圾桶系统包括单片机模块、红外线传感器模块、火源检测模块、触摸按键模块、舵机驱动模块、稳压电源模块、水泵驱动模块。其工作过程是通过红外传感器感应有垃圾投入信息,并将此信息传递给单片机,单片机接收该信息判断此时是否处于垃圾桶盖为常开状态,控制舵机模块驱动舵机转动从而实现自动开盖。若出现火源,则红外传感器模块、火源检测模块和触摸按键模块,输出信号传递给单片机,单片机再将控制信号传递给舵机驱动模块和继电器模块从而使舵机与水泵工作。稳压电源模块是针对不同模块对电源的不同要求所设计的,保证整个系统的能量充足和工作时系统的稳定性。系统框架图如图1所示。
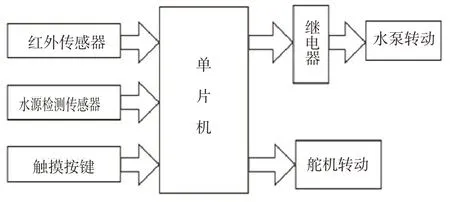
图1 系统框图
3.2 单片机系统设计
1.单片机选择
系统采用的是一种低功耗、高性能CMOS、具有8位微控制器的芯片--STC89C52RC,该管脚排列图[5-14]如图2所示。
2.复位电路设计
89系列单片机在启动时需要复位,使CPU及系统各部件处于确定的初始状态,并从初始态开始工作。AT89S52 的按键复位电路如图3 所示,按下按键,电源对电容C3充电,使RST端快速到达高电平;松开按键,C3向芯片内阻放电,恢复为低电平,从而使单片机能够实现复位功能。
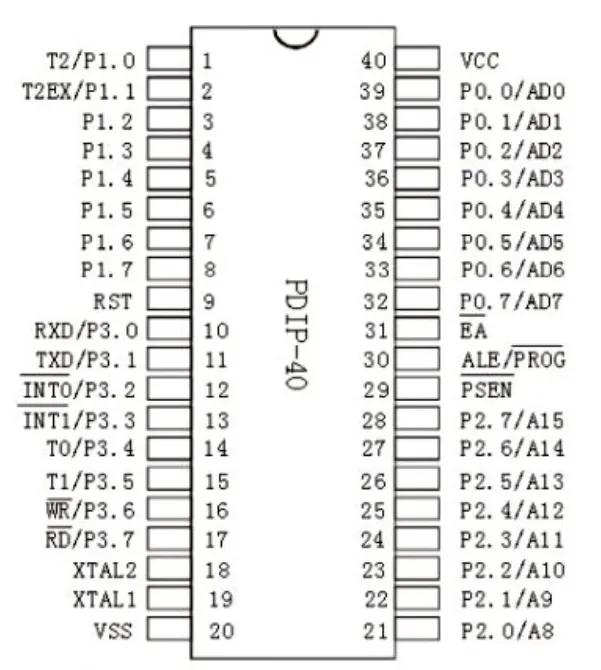
图2 STC89C52RC单片机管脚排列图
3.晶振电路设计
晶振电路能够给系统提供基本的时钟信号。为了使系统各部分能够保持同步,一般来说一个系统会共用一个晶振。本次设计的系统采用的是仅用一个晶振来实现同步,其电路图如图4所示。
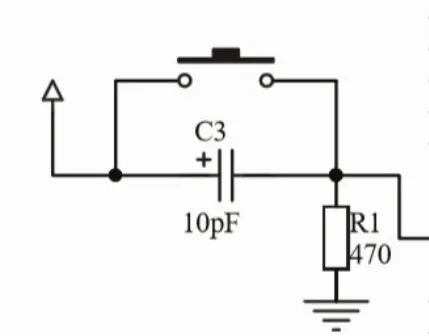
图3 复位电路
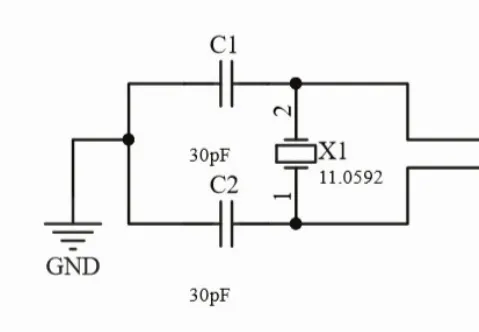
图4 晶振电路图
3.3 传感器系统元件设计
1.红外传感器选择
红外检测模块是通过红外感应器在有效范围内检测有无物体,然后将信息传给单片机。红外模块电路原理如图5所示。
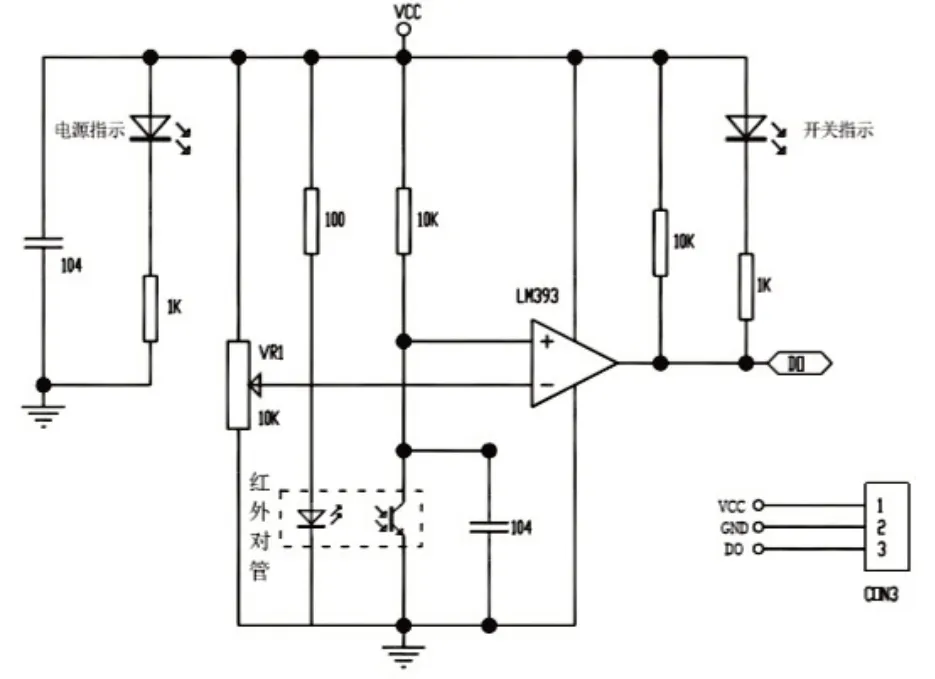
图5 红外模块电路
2.火焰传感器选择
火焰传感器模块也是一种红外接收器,当红外接收器的有效范围内检测有无火焰,然后将信息传给单片机。火焰传感器模块电路原理如图6所示。
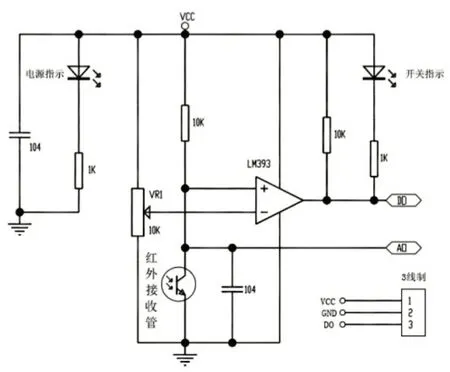
图6 火焰检测模块电路
3.4 驱动系统设计
1.动力驱动模块选择
本次设计使用舵机SG90,俗称9g舵机[15]。其驱动脉冲如图7所示。
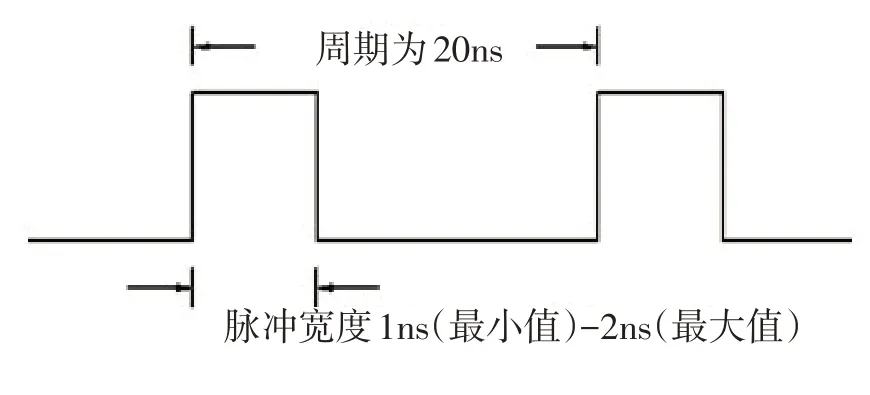
图7 脉冲频率图
2.继电器模块选择
为了方便与可靠性,本次采用的继电器为1 路高电平触发的电磁继电器模块,其电路如图8所示。
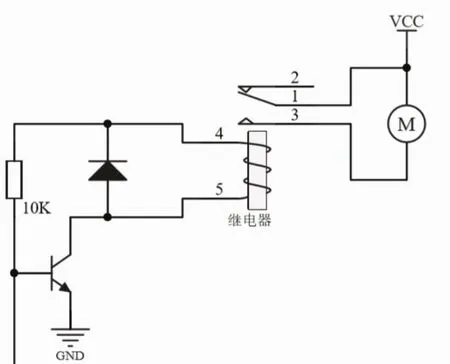
图8 继电器电路
4 系统控制部分软件设计
4.1 总体控制思路
当程序开始执行时,先对定时器、各传感器与单片机引脚初始化,接着用红外传感器检测是否有人靠近垃圾桶的上端感应区,如果有人靠近则将启动舵机进行开盖。在关盖的情况下判断触摸开关是否被打开,如果被打开,则舵机转至90 度用来开盖,直到触摸开光被再次触摸时,舵机回到初始值关闭盖子。在此过程中即便有物体接触到红外传感器的感应区也不会对舵机产生影响。当程序开始时,火焰传感器一直检测是否有火焰靠近,如果有火焰靠近,此时处于开盖状态的则蜂鸣器开启,10S后继电器打开,当盖子处于关闭状态则直接触发继电器,水泵立即工作。系统流程[16-19]如图9所示。

图9 系统设计流程图
目前支持单片机应用系统开发的语言一般有机器语言、汇编语言和高级语言(如C51)。本系统选用适时性强与透明度高的C 语言作为编程语言,系统软件的开发全部采用Keil μVision4进行。
4.2 开盖控制软件模块设计
首先判断触摸按键是否被触摸,如果被触摸,则驱动舵机顺时针转动90°,实现垃圾桶盖子常开状态直至触摸按键被再次被触摸,才能将垃圾桶盖子关闭。如果触摸按键没被触碰,则检测红外传感器上方是否有遮挡物,如果有则驱动舵机顺时针 转 动 90°,垃圾桶盖子开启并延时3s后自动关闭。其流程如图10所示。
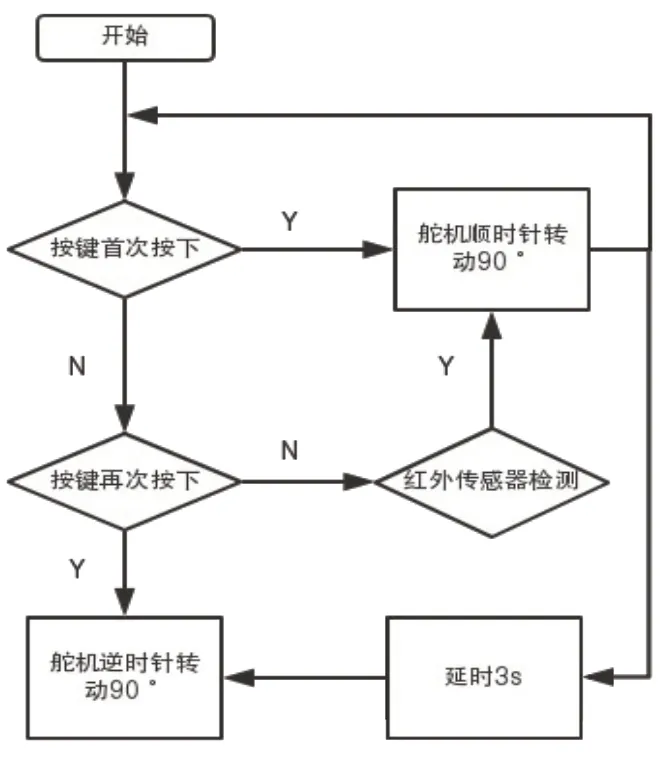
图10 开盖模块设计流程图
4.3 灭火控制软件模块设计
通过对火焰传感器输入的模拟信号进行转换、处理分析并与预设参数限值进行比较判断,满足一定条件则执行继电器的闭合功能,水泵工作自动灭火。其流程如图11所示。
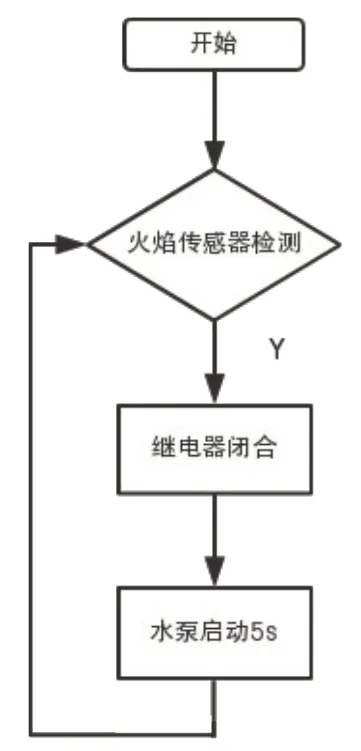
图11 灭火模块设计流程图
5 系统整体外形设计与装配
5.1 垃圾桶桶体设计
针对室内垃圾桶,选择垃圾桶为长方体,长为24 厘米、宽为24 厘米、高为46 厘米,垃圾桶体分内、外桶。为了防腐外桶采用不锈钢材质。垃圾桶上盖与内桶则使用PPS 塑料材质,该材料除了有塑料的密度小、塑性高以外,还能耐高温,可以很好地预防火灾的发生。为了使用方便,在内桶上增加一个可以直接手提的结构。
垃圾桶外桶的上端放置了控制按钮及感应控制探头,为了防止开盖时会误碰到使用者的手,将感应区放置在与水平面夹角为45°的位置。下端具有两个槽分别用来存放电源和用来盛放灭火时用的水,存放电源的槽内侧面有电源充电口。在盛水的水槽上连接一个水管,并将水管延长到垃圾桶上部端口处,在端口四周开有小口用来喷水。垃圾桶外桶外观经过适当美化,与使用的环境相匹配。本次设计使用的软件为SolidWorks[20],图12 为垃圾桶效果展示图。
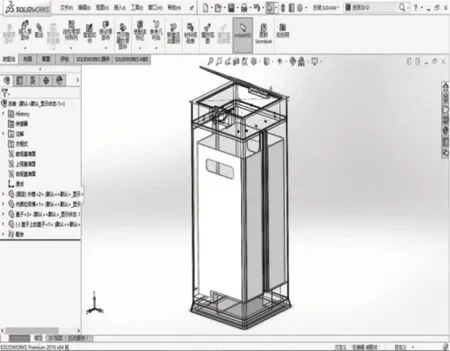
图12 垃圾桶效果展示图
5.2 实物模型试验及结果
为了验证产品功能,进行了实物模型的制作。试验时,当有手靠近红外传感器的感应区时,垃圾桶能够开盖,但是,开盖时可能会出现手与盖子触碰。在多次测试中,发现是因为红外感应器的感应区与盖子开合路径有重合,将红外传感器的探头向外移出450,再次测试手即便停在感应区也不会和盖子有触碰。当触摸开关被触摸时,盖子处于完全开启状态,此时无论感应区是否有遮挡物都不会对其产生影响,直到再次触摸到触摸开关,才会使得盖子关闭,且红外感应器开始工作。
火焰传感器本应该放在垃圾桶盖子的下端用来检测垃圾桶内是否有火焰产生,但是为了测试方便,试验中将探头放在了垃圾桶盖子的上端。为了更好地观察水泵抽水的结果,在垃圾桶上方开了一个小孔,将水管从内部引出来,并使从内部抽出的水进行循环利用。
经过多次测试,垃圾桶的主要功能均能很好地实现。
6 总 结
本文介绍了多功能垃圾桶设计的主要内容,主体为3个部分。第一部分是多功能垃圾桶的控制电器系统原理设计,系统采用单片机STC89C52 作为主要控制系统,控制各模块配合共同工作,实现了多功能。利用红外传感器检测是否有需要将垃圾投入垃圾桶。当需要长时间将垃圾盖开放时,可以通过TTP223 触摸传感器与单片机经过相应的程序处理,使得垃圾桶盖处于常开状态。当垃圾桶内有火源出现时,能够自行启动灭火装置。通过一个火源检测模块发现垃圾桶内有火焰时,将数据传给单片机从而判断是否开启继电器为水泵供电,使得水泵工作。电机驱动模块采用的是比较简单控制的SG90 舵机,并且选好转动角度,实现垃圾桶在同一空间内实现最大打开角度。第二部分是垃圾桶的外形及机械系统设计,针对室内使用条件,采用了内外双桶及外桶下部存水槽的设计。垃圾桶的外形美观,满足使用者的要求。第三部分是制作垃圾桶实物模型,通过选购一些元器件,搭建了一个能够实现主要功能的实物模型。并进行联合调试,最终实现多功能垃圾桶的各项功能。
猜你喜欢
好孩子画报(2021年2期)2021-03-15
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
作文与考试·小学高年级版(2020年19期)2020-11-16
孩子(2020年4期)2020-06-08
小学科学(学生版)(2019年11期)2019-12-09
电子制作(2018年1期)2018-04-04
三联生活周刊(2017年9期)2017-03-03
航空模型(2016年5期)2016-07-25
作文评点报·中考版(2015年15期)2015-12-17
