小半径国省干道公路短隧道驾驶人视觉特性研究*
2020-07-27 06:45杜志刚王首硕
武汉理工大学学报(交通科学与工程版) 2020年3期
王 朝 杜志刚 王首硕 陈 鑫 陈 云
(武汉理工大学交通学院 武汉 430063)
0 引 言
由于山区地理环境复杂,国省干道路线常常需要在局部克服较大高差,因此,小半径短隧道的运用具有独特的优势.但隧道路段具有封闭、视线差、空间小等特性,一旦发生交通事故,整条公路隧道的通行能力和安全性都将受到影响.
近年来,国内外学者在驾驶人的视觉特性影响规律方面进行了大量研究,Brackstone等[1]研究了复杂程度不同的认知活动对驾驶人视觉特性的影响;Reimer[2]研究了在车辆行驶时驾驶人的眼动特性和认知负荷量的关系;Cooper等[3]对高速行驶时驾驶人的眼动行为进行了研究;杜志刚等[4]利用眼动仪研究了隧道进出口的视觉特性;赵烨华等[5]运用神经网络和回归方法,通过程序计算和统计分析实测数据,以及模拟视觉特征参数变化,建立驾驶人眼动指标变化的数学模型;胡月琦等[6]研究了不同经验的驾驶人在高速公路特长隧道环境中的视觉特性差异.周海宇[7]研究了小半径曲线隧道交通环境及驾驶人视觉特性;潘姝等[8]研究了不同经验驾驶人在城市隧道环境中的注视转移特性.现有研究以小汽车为试验车辆针对长隧道和特长隧道的研究比较多,针对大型车和小半径短隧道的研究较少.鉴于此,文中拟开展公路短隧道大货车和小客车的行车眼动追踪试验.对比不同行车环境中,驾驶不同车型条件下驾驶人的动态视觉特性,分析造成视觉特性差异的原因,以期为深入研究驾驶人视觉特性规律,提高驾驶人在小半径短隧道行车安全奠定基础.
1 试验设计
选取云南省临沧市境内的祥临公路(国道G214)的昔宜隧道为试验对象.该隧道全长175 m,位于圆曲线半径为255 m的平曲线路段上,为双向2车道,隧道内限速40 km/h,无主动照明设备.该路段车流属于自由流状态,驾驶人基本不会受到前后方车辆和路侧干扰.由于在隧道不同位置的光环境是不同的,本文参照文献[9]将隧道路段分为接近段、入口段、中间段、出口段,以及驶离段五段,由于隧道较短不设过渡段,增加驶离段(见图1),各段长度依据规范设置.
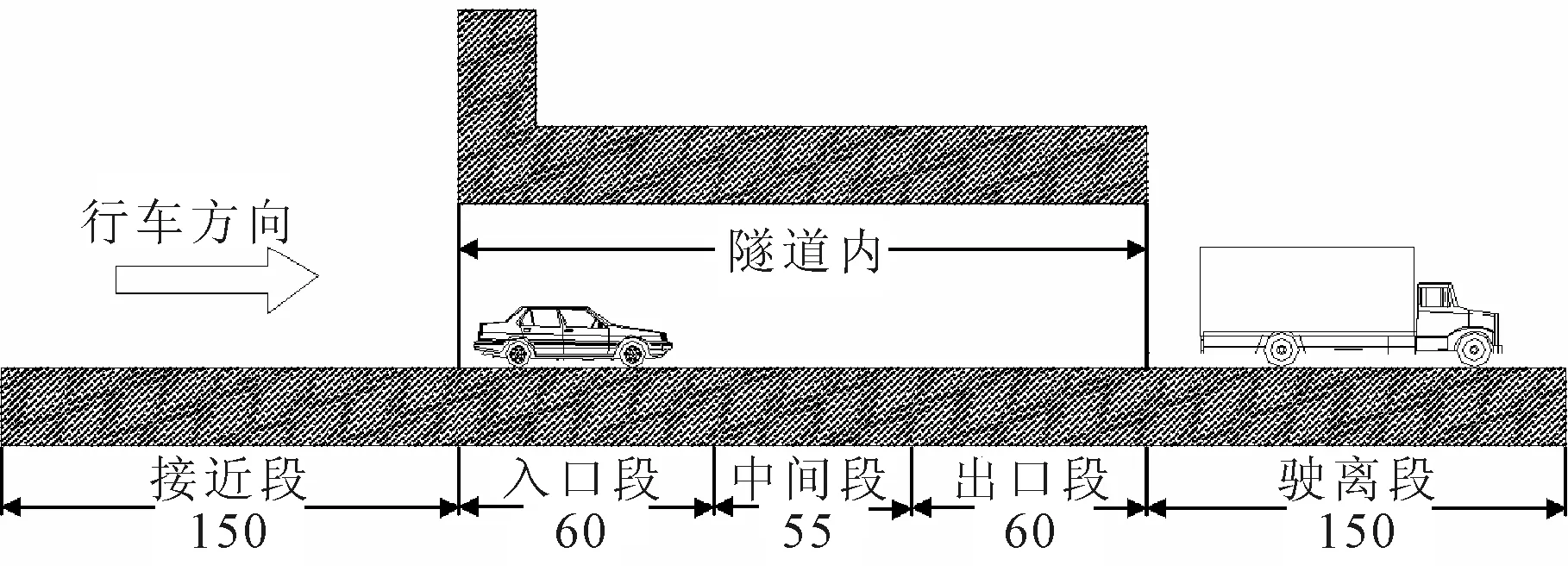
图1 隧道分段(单位:m)
试验共选取10名驾驶人作为测试者,其中5名具有大型货车的驾驶经历,所有驾驶人平均驾龄在5年以上.试验车辆分为小客车和大型货车两种,小客车选用别克GL8,大货车选用轩德X6,车辆性能良好,能够按照试验要求完成试验任务(为论述和对比分析方便,以下将试验大货车简写为“大车”,试验小客车简写为“小车”).采用德国某眼动仪作为记录驾驶人眼动行为的试验仪器.
2 动视点指标
为了研究试验中驾驶人的视觉特性,一般会对眼动仪采集的各个单一指标的数据进行分析,一般分为注视类、扫视类、眼跳等,其中有:①注视时间;②扫视时间;③视力角.
这种逐一分析方法无法全面的评价驾驶人在隧道环境下的收集加工信息的综合水平,故而本文将构建一种综合评价方法.其中有日本学者提出动视点指标如下:将路段单一视点平均注视时间与单位时间内平均注视次数的乘积p值定义为动视点指数,用公式表示为
p=tf
(1)
式中:p为注视时间百分比;t为平均注视时间;f为单位时间内平均注视次数.
式(1)实际上是便是注视时间百分比的计算式,此方法描述了注视时间,评价方法不全面,根据上述的眼动指标以及其与信息处理的正负相关性,国内研究者根据这些关系构建了如下表达式:
(2)
式中:Ti为视点在ti时刻注视时间为Ti,s;Ni为ti时刻注视频率,次/s;n为注视行为次数;di为取该路段视点扫视角度i%分位数值;ki为视点平面分布权重系数,以高斯分布计算.
式(2)路段的n次注视行为分开计算并累加再求总和的平均值,但由于车辆行驶的连续性,一般会采用一路段各眼动指标的平均值以评价整体水平,故参照式(2),以平均值为参数计算,选取注视指标和扫视角指标评价信息收集加工水平.对于含有n次注视行为的某路段,建立如下视点平面分布动视点指标,以评价视觉信息加工水平.
α=kpt
(3)
式中:α为定义动视点指标;k为视点平面分布权重系数;t为平均注视时间;p为视点对注视目标重视程度系数,即注视点时间百分比.
式(1)中p实际上就是注视持续百分比,k值通过视力角表示,当驾驶人扫视角度越大,即视点平面分布范围越大,其视认效果越差,视觉信息加工水平越低,但由于视力角不能直接带入公式,需要构建关系式,考虑到视力角的极限情况,当视力角C=0时令k=1,且当视力角服从正态分布时,建立一种函数关系,使得转换的得到的系数在0~1之间且符合正态分布,构建k的表达式:
(4)
式中:C为视力角度数的数值.
综合式(2)~式(4),可得
(5)
通过式(5),当动视点指标较大时,表明驾驶人视觉信息加工水平较高,心理紧张程度较高,对行车安全是有利的;但分析可知当动视点指标过高,甚至超过驾驶人视觉心理承受能力时,则容易引起心理恐慌,诱发不良驾驶行为,甚至导致交通事故.
3 试验分析
3.1 平均注视时间
在动视点指标中,平均注视时间是一个比较重要的指标,利用IBM SPSS和Origin软件对注视时间数据进行分析,首先对大车白天和大车夜晚在隧道接近段、入口段、中间段、出口段和驶离段的平均注视时间的箱线图见图2、图3.

图2 左转弯平均注视时间箱线图
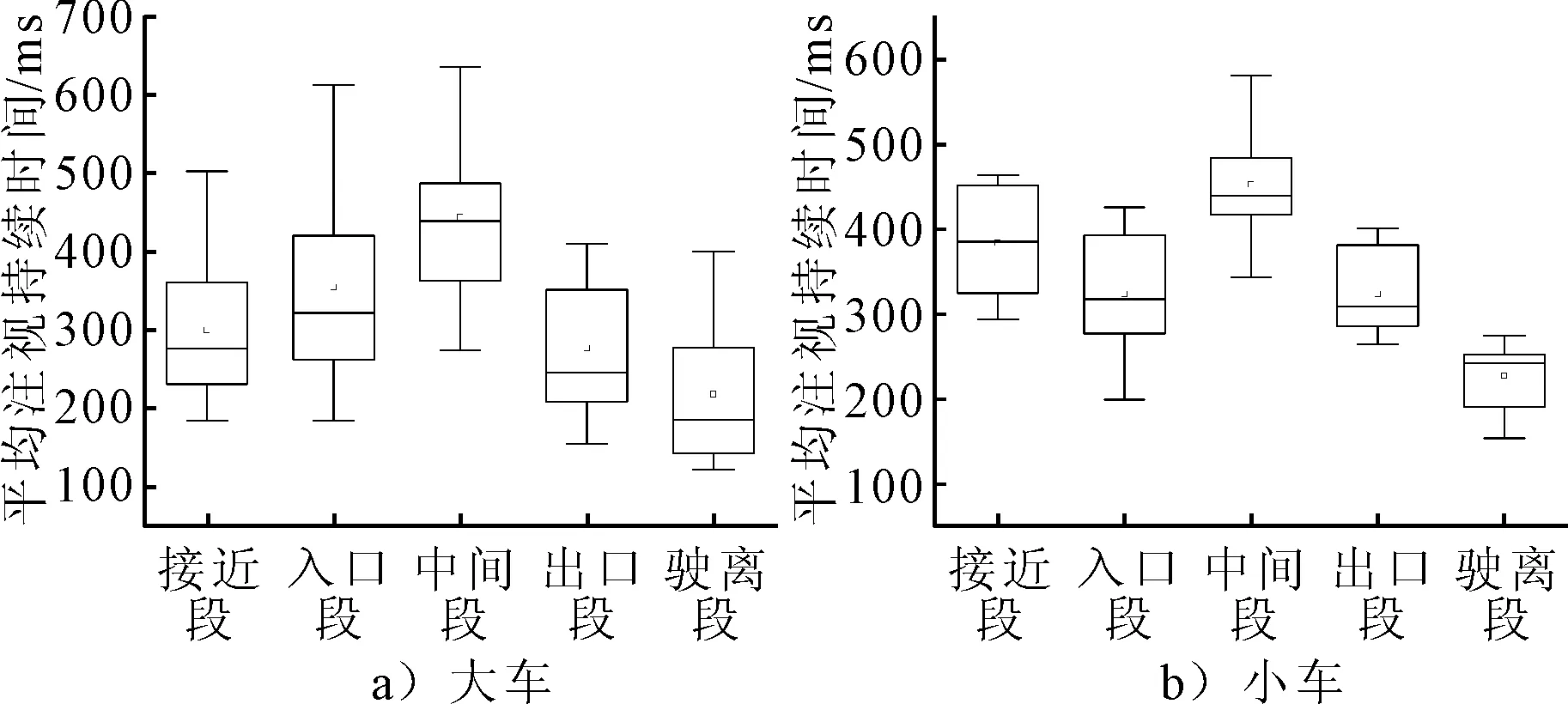
图3 右转弯平均注视时间箱线图
由图2可知,无论小车还是大车,驾驶人在隧道内提取目标信息的难度高于隧道外,且在中间段提取难度最大,这反映了驾驶人在隧道内的心理负荷大于隧道外,说明驾驶人在小半径隧道内获取信息比较困难.从车型来说,小车驾驶人提取信息的难度明显大于大车,大车的心理负荷要好于小车.由图3可知,右转时注视时间规律基本和左转弯相同,但大车的平均注视时间总体上略高于左转弯时的平均注视时间,小车在中间段和出口段左、右转差距较大,其他路段的差距不大.
1) 隧道不同路段差异性分析 为进一步分析试验中平均注视时间的影响程度和规律,对隧道不同段数据进行单因素方差分析.先采用Shapiro-Wilk检验,再检验方差齐次性,最后进行单因素方差检验,见表1、表2.
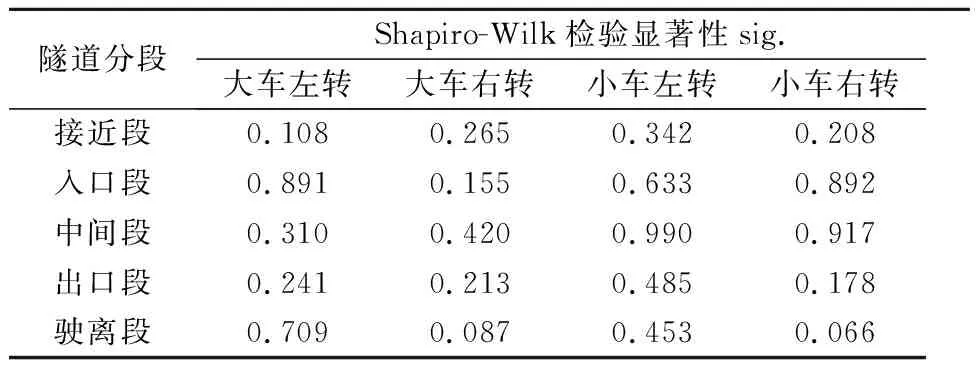
表1 平均注视时间正态性检验
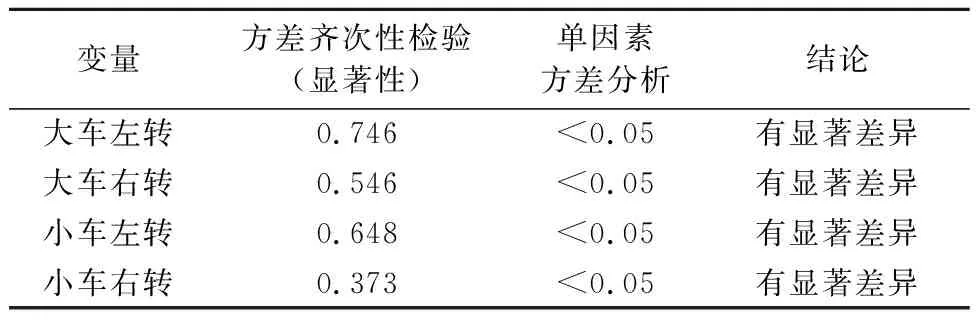
表2 平均注视时间单因素方差分析
由表1可知,各组数据的平均注持续时间得显著性水平大于0.05的,即各组均是数据是服从正态分布的,可以进行下一步检验.由表2可知,大车左转和右转的注视时间均大于0.05,故可以进行单因素方差分析,且计算结果显示,大车在左转和右转时在隧道各段注视时间存在显著差异;同样,对小车的数据分析可知,小车在左转和右转时注视时间是存在显著性差异的.这表明,驾驶人在驾驶小汽车或者大货车进入小半径公路隧道时,在进入隧道前150 m、隧道内不同位置以及出隧道后150 m的过程中,在不同路段提取信息的难度是有显著性差异的,其心理负荷也不同.
2) 大、小车差异性分析 一般在对两组相互独立且呈正态性分布的数据,采用t检验方法进行分析.对于本试验,试验数据已通过正态性检验,利用软件对数据进行t检验,在检验中,软件会得到两行的检验结果,当数据通过方差齐次性检验,即第一个显著性sig.>0.05,使用第一行的检验结果,否则使用第二行结果.结果中第二个显著性P值是反应数据差异性,当P<0.05.表明两组数据具有显著性差异.t检验结果见表3.
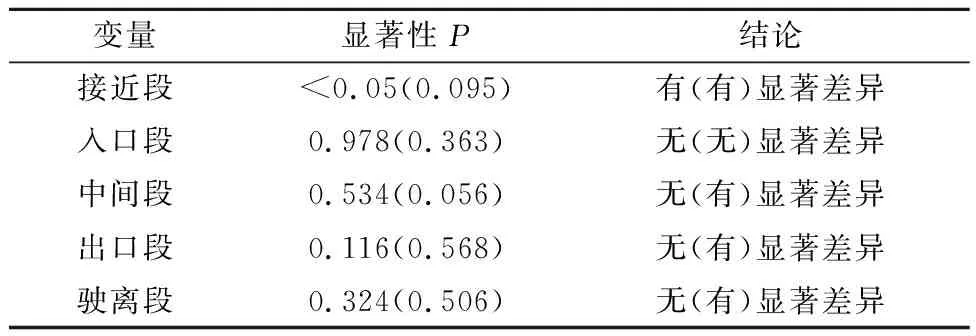
表3 大、小车右转(左转)平均注视时间t检验结果
由表3的t检验结果可知,在车辆左转时,大小车除了在入口段的平均注视时间无显著差异外,其他路段均具有显著差异性,这说明大车和小车左转时提取信息的难度时不同的,在入口段由于路段长度较短、瞳孔剧烈变化而导致“黑洞效应”等影响,可能导致大车、小车注视时间差异不明显.在右转时,大、小车只在接近段有显著差异,其他四段均无显著性差异,说明大、小车在驶进入口段后提取信息的难度差异不显著.总体来看,大、小车在左转时平均注视时间的差异性较大,右转弯显著性差异只存在于接近段.
3.2 平均扫视时间与视力角
将各个条件下的扫视时间求均值可以反映扫视时间的平均水平,见图4.由图4可知,在接近段,大车与小车是存在差距的,大车平均扫视用时更长,在中间段,大车左转扫视用时最高,其他部分四种条件下扫视时间相差无几.说明在隧道内驾驶人需要处理信息的复杂度几乎可以看成是一致的,而进隧道前大小车之间还是有区别的.

图4 扫视时间的均值
按照上述数理统计方法,对隧道各部分的平均扫视时间先做正态性检验,发现各组数据均服从正态分布(sig.>0.05),但方差齐次性检验结果表明:各组数据不都满足齐次性要求,故不能是使用单因素方差分析方法,选用非参数检验方法(Friedman检验)来检验平均扫视时间,结果见表4,用t检验分析大、小车的差异,结果见表5.
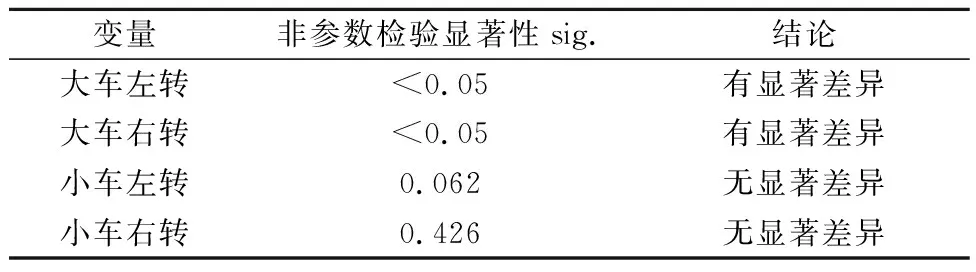
表4 平均扫视时间单因素方差分析
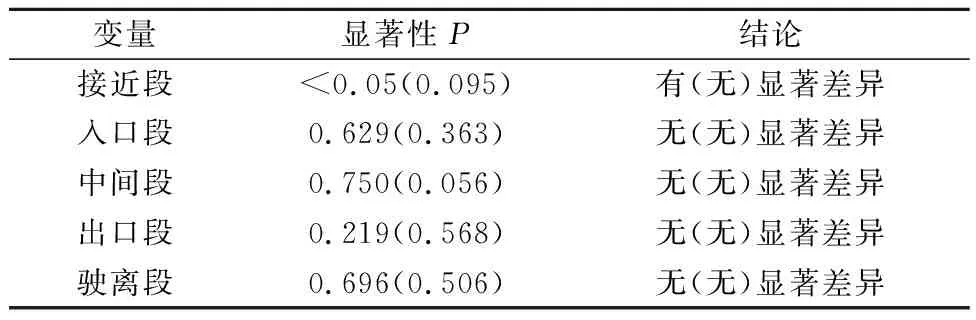
表5 大、小车右转(左转)平均注视时间t检验结果
由表4~5可知,在平均扫视时间指标上,在隧道路段上大车能够体现出差异,而小车差异不显著.又大小车的差异并不显著.相比于注视时间,驾驶人的扫视时间的差异性并不显著,也说明注视时间对不同条件下的驾驶人眼动变化更敏锐.
统计大车不同条件下通过隧道不同路段的视力角,见图5.做同上正态性检验,得到各组视力角数据均服从正态分布,经单因素方差检验发现大车各段存在显著差异,小车则差异不显著,与扫视的情况相同,再t检验法对比大、小车的差异得到结果与扫视也相同.这说明在隧道路段,只有大车的扫视时间和视力角是有差异的,即大车驾驶人在不同路段想要收集信息多少是不同的,反应大车驾驶人在不同路段心理变化较大.
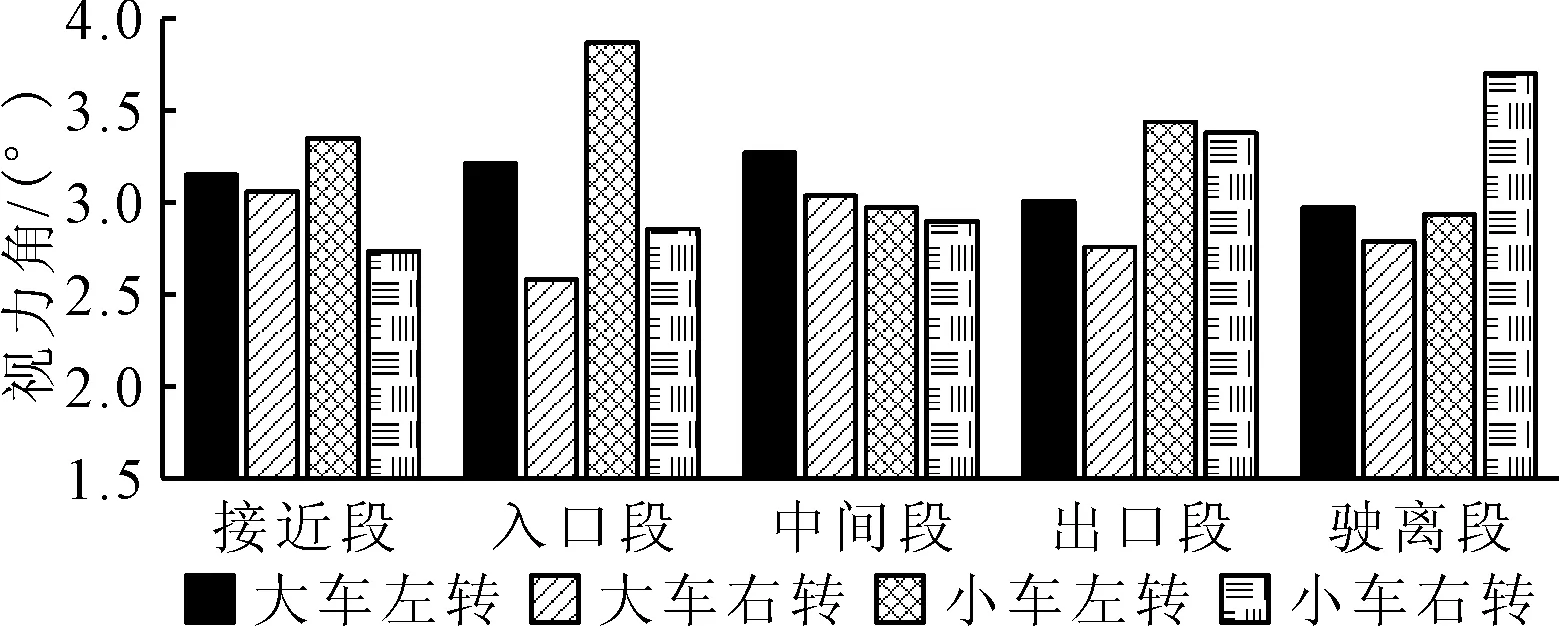
图5 视力角
3.3 动视点指标
对隧道各个路段的注视时间、注视频率、视力角等指标取均值,根据式5得到定义的动视点指标的计算值见图6.

图6 动视点指标计算结果
由图6可知,新的动视点指标在隧道各段的变化趋势与平均注视时间基本一致,在中间段达到最大,且大车右转高于左转,小车在接近段、入口段、中间段也是如此.这说明在隧道中间段驾驶人的信息加工水平最高,驾驶人在进入隧道的过程中,紧张感在提升,注意力比较集中,提取加工道路信息的速度较快,而后则开始放松.新的动视点指标能够对驾驶人眼动行为进行动态分析,再结合各个指标差异分析,可以对各种条件下的眼动行为进行详尽的分析和对比.
4 结 论
1) 相较于隧道外路段,大货车驾驶人、小客车驾驶人在隧道内行驶时,视觉及心理负荷增大,平均注视时间变长,动视点指标变大.同时,大货车驾驶人的心理负荷情况好于同条件下小客车驾驶人,且在小半径隧道弯道上,左转条件下大货车和小客车的视区有显著性差异,导致驾驶人眼动行为存在显著差异,而右转条件下驾驶人眼动行为稳定,影响甚少.
2) 驾驶人在小半径隧道弯道上,隧道内扫视时间更短,提取目标信息的速度更快,搜索效率高,但大货车提取信息速度更容易受隧道环境影响.这是由于大货车座高,视野更开阔,同时大货车上后视镜较多,导致驾驶人需要更频繁的观察后视镜,以确保交通安全.
3) 新的动视点指标表明,小客车在入口段出现信息加工水平下降现象,可见隧道的“黑洞效应”对小客车驾驶人信息提取加工的负面影响十分严重,对大货车驾驶人不显著.同时,大货车左转时信息加工水平较低.与实际情况较为符合.
4) 基于不同车型上驾驶人在不同行车条件下的眼动行为特征,可有针对性对大货车占有较大比例的小半径短隧道内外交通安全设施设计进行改进,特别加强对隧道左转弯方向上的视觉诱导,同时公路隧道视线诱导设施设置需要考虑大货车、小客车驾驶人视觉特性.
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
北京交通大学学报(2021年4期)2021-09-26
快乐语文(2020年36期)2021-01-14
当代陕西(2019年23期)2020-01-06
建材发展导向(2019年11期)2019-08-24
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
环境(2016年7期)2016-05-14
新闻前哨(2015年2期)2015-03-11
中国校外教育(上旬)(2009年6期)2009-08-04