基于机器学习的车用主动防撞预警雷达信号识别系统研究
2020-08-03 01:50张馨予
计算机测量与控制 2020年7期
张馨予
(西安文理学院 信息工程学院,西安 710065)
0 引言
交通事故发生次数有所减少,但趋势发展缓慢,由此研究车用主动防撞预警雷达装置是具有必要性的[1]。该装置能够提前探测汽车前方的障碍物,提醒司机采取紧急措施,可以从根源上防止追尾及危险事故发生[2-3]。车用主动防撞预警雷达装置是提高汽车安全行驶的主要技术,由该装置发射出信号识别目标,再对其分析,可精准定位前方障碍物的位置信息。装置根据得到的目标信息,能够辅助司机对危险情况的判断,以此提高汽车行驶安全性[4]。
目前,在车用主动防撞预警雷达信号识别系统中,可用于信号识别的技术主要有激光扫描技术、红外技术和超声波技术,其中超声波技术探测范围较窄,响应时间长,受到外界温度影响较大,通常适用于倒车雷达信号识别;激光扫描技术虽然探测距离较远,但探测头需要光学窗口,容易被污染物遮盖;红外技术探测距离较短,受到温度影响雷达信号识别不精准。
针对上述问题,提出了基于机器学习的车用主动防撞预警雷达信号识别系统研究。
1 基于机器学习的信号识别系统硬件架构
机器学习是一门交叉学科,专门研究计算机如何模拟人类学习行为,以此获取新的技能[5]。在机器学习支持下,设计车用主动防撞预警雷达信号识别系统总体架构如图1所示。
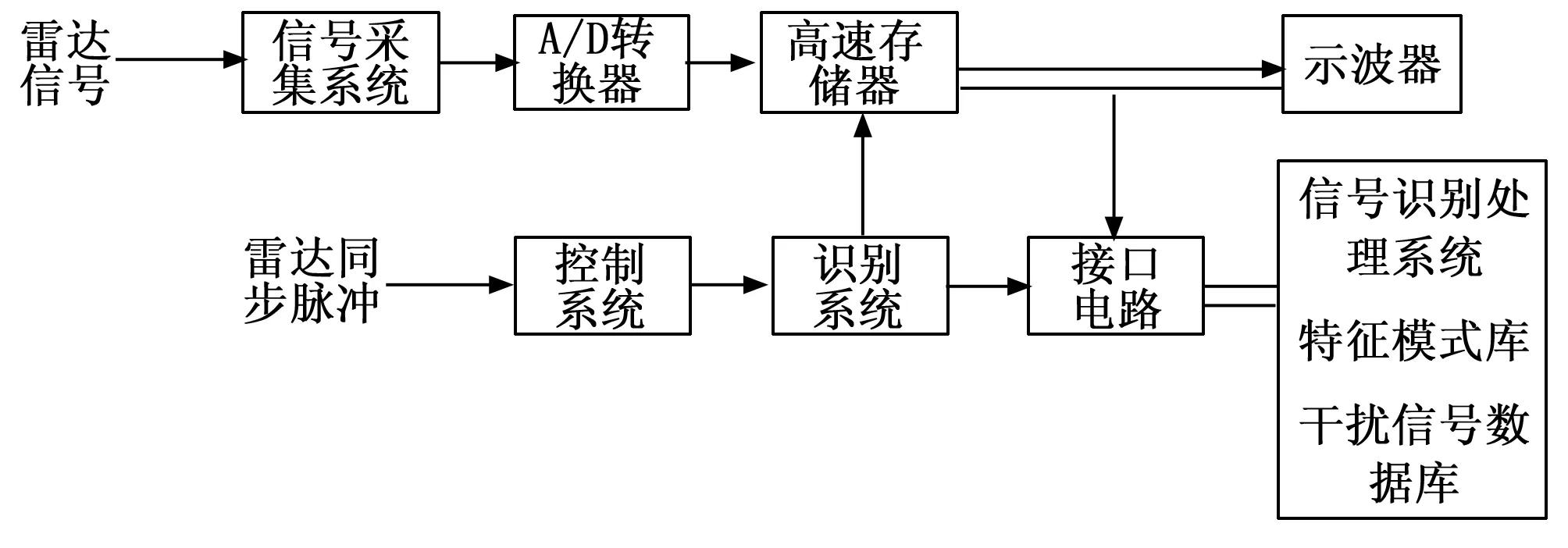
图1 识别系统硬件架构
该系统主要是由信号采集系统、控制系统、识别系统、接口电路及信号处理系统等部分组成的。基于机器学习的雷达信号识别系统是将模拟信号转变为数字信号后,使用机器学习方法模拟人工学习方式得到信号数字谱,根据匹配结果,分析识别速度,使得输入信号可以同时与各个模板存放的雷达信号匹配识别,提高信号识别速度[6]。当输入雷达信号与模板信号种类一致时,不同雷达发射的信号,通过匹配识别,有可能受到外界噪声干扰导致识别精准度低[7]。因此,在信号处理系统支持下,结合信号处理技术,解决信号干扰问题。
1.1 信号采集系统
针对信号采集系统设计,需采用BGT24MTR12E6327XUMA1型号原装雷达收发器。
该收发器具有一个发射器和两个接收器,完全集成VCO低相位噪声,具有1.5 GHz和23 kHz输出功率的可切换预分频器[8]。低噪声系数为12 dB、高转换增益为26 dB,单电源电压为3.3 V,全面ESD保护器件。使用BGT24MTR12E6327XUMA1型号原装雷达收发器对特定无线电信号持续监听,当出现威胁讯号时,雷达收发器会对司机发出预警信息[9]。
1.2 信号处理系统
将BGT24MTR12E6327XUMA1型号原装雷达收发器输出的混频信号通过TendaA9信号放大器发送到信号处理系统之中,该系统负责调节、放大处理、A/D转换及频率估计,并将结果通过CAN总线传输到车用计算机系统之中,以此控制汽车行驶速度[10]。
对于信号处理系统,选择DSP处理器作为核心组件,整个系统集成在一个电路板上,如图2所示。
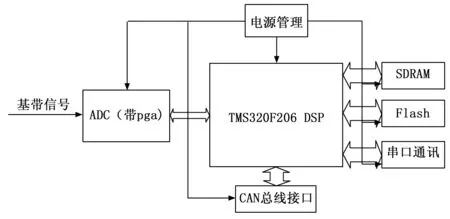
图2 信号处理系统
由图2可知:该系统主要是由电源管理、CAN总线接口、同步动态随机存储器、Flash、串口通讯等模块组成[11]。
1.2.1 TMS320F206型号DSP
使用TMS320F206型号DSP芯片,具有高速定点数字处理功能,存入到该芯片中的信号通过串口以9 600 b/s速率进入计算机,计算机将数据存储到缓冲区域,通过A/D转换器将结果显示在显示器上。
TMS320F206型号DSP结构框图如图3所示。
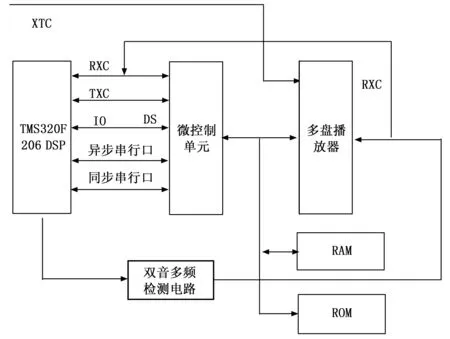
图3 TMS320F206型号DSP结构框图
将TMS320F206数据发送给外部时钟、内部帧同步及连续模式,接收帧同步脉冲主要是由微控制单元MCU控制产生。当调制调节器建立连接且微控制单元MCU接收到发射的第一个信号时,启动数字信号处理器接收数据[12]。
根据信号处理要求,该芯片可在一个指令周期内完成一次加乘法运算,分开程序和数据空间,可以同时访问指令与数据。TMS320F206型号DSP芯片具有快速RAM,可通过独立数据总线同时访问数据,具有低成本及跳转硬件支持功能。
1.2.2 TendaA9信号放大器
使用TendaA9信号放大器具有300 M信号扩展器,信号放大200 m2,基于IEEE802.11n协议,通过软件优化后,兼容99%信号扩展。
将混频输出信号放大至有效倍数,然后进行滤波处理,再利用可调节增益放大器对不同位置接收到的雷达信号放大处理,并利用A/D转换器将其转换为数字信号形式。
1.3 接口电路
TMS320F206型号DSP通过CAN总线和UART接口连接外部设备,将TJA1041A作为CAN总线收发器,通过引脚TXD、RXD传输数据到TJA1041A之中,TJA1041A及部分外围电路示意图如图4所示。
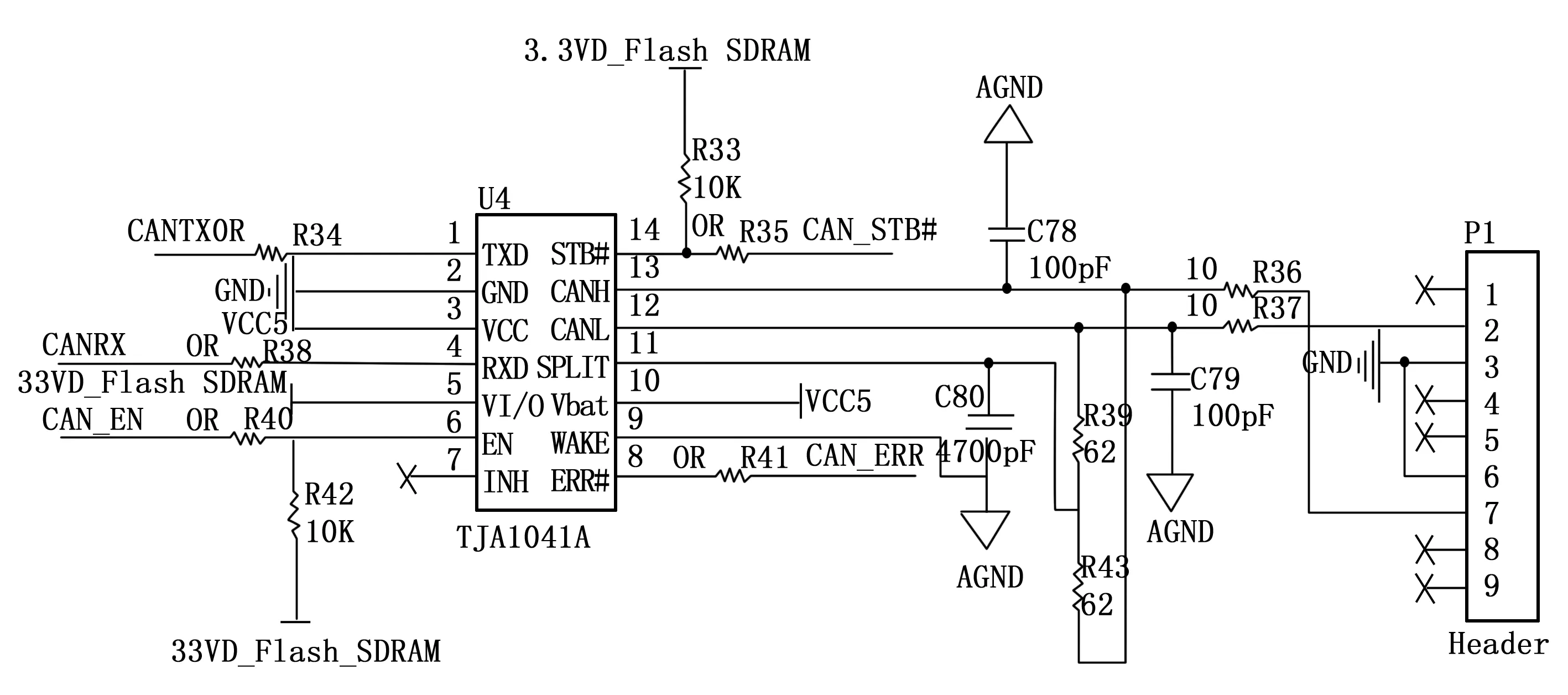
图4 TJA1041A及部分外围电路示意图
UART 连接在发出兼容 RS232 信号的电路,RS232 标准定义与接地有关的逻辑“1”信号为-3 V到 -15 V,相对于接地的逻辑“0”为3 V到15 V。因此,当 DSP 的 UART 连接到 PC 时,它需要通过 RS232 驱动程序进行电平转换。MAX3232是PC和DSP之间的驱动IC,采用RS232标准,其作用是使PC和DSP之间能够串行通信。
1.4 抗干扰模块设计
为了避免同向和相向干扰信号对识别精准度影响,设计如图5所示。
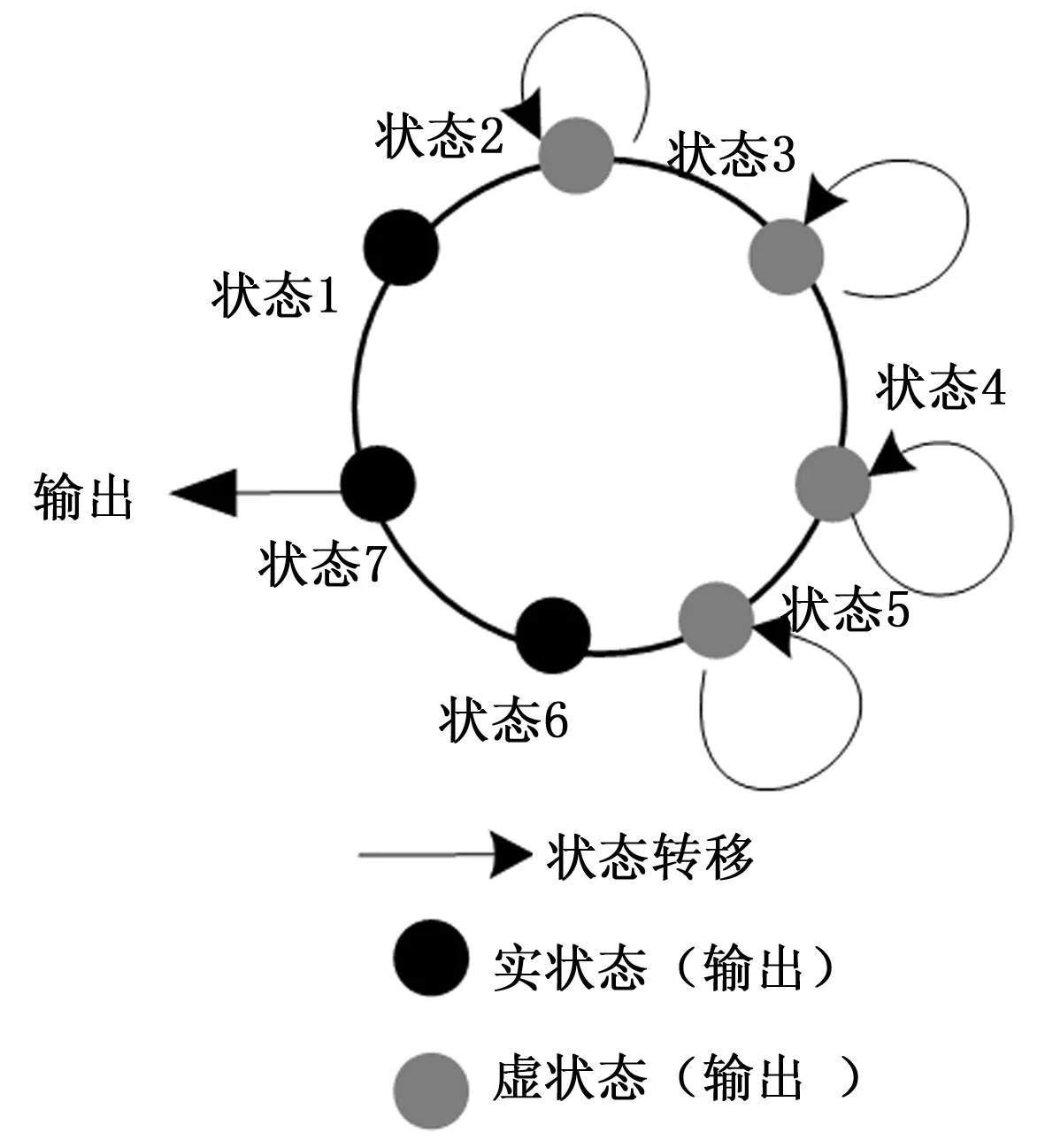
图5 流水线结构转换方式
使用如图5所示的转换方式,方便与TMS320F206型号DSP连接,当输出虚状态信号时,即为同频和杂波辐射信号,此时应状态转移,在机器学习支持下获取实状态信号,利用该方式有效降低干扰信号对识别精准度的影响。
2 软件部分设计
面向TMS320F206型号DSP处理器对软件模块设计,结合机器学习方法为实际车用主动防撞预警雷达信号识别系统提供具体预警业务。
2.1 TMS320F206型号DSP工作流程
TMS320F206型号DSP程序流程如图6所示。
具体工作流程如下所示:启动系统后,TMS320F206型号DSP首次初始化,打开异步端,检测调制调节器是否已经准备好。如果没有准备好,需复位调制调节器;反之,则需将AT指令传送到调制调节器之中,并初始化调节器。调制调节器每次接收到正确指令且正确操作后,会通过异步串口传送异常信号。因此,如果TMS320F206 DSP接收到该信号,就说明初始化成功,并开始同步信号传输。
2.2 车用主动防撞预警雷达信号识别
在TMS320F206 DSP程序流程支持下,跟踪车用主动防撞预警雷达信号,并结合机器学习方法识别信号。针对模糊雷达特征信号,使用机器学习方法为信号模拟人类识别过程提供技术支持。当获取新的信号特征之后,应先及时判断信号优先传输路径是否被占用,并观察不同雷达信号相似度。
雷达信号相似度计算公式如下所示:
(1)
公式(1)中:fi(x)为雷达信号相似度分析模型函数;ω为信号权重;m为雷达接收信号数量;i表示信号分量。依据上述公式可得到雷达信号相似度,依据该相似度能够精准判断出雷达按信号传输路径,分别是发送路径、传输路径和接收路径,使用雷达信号相似度分析模型函数fi(x)识别这三条路径中的信号,具体识别过程如下所示。
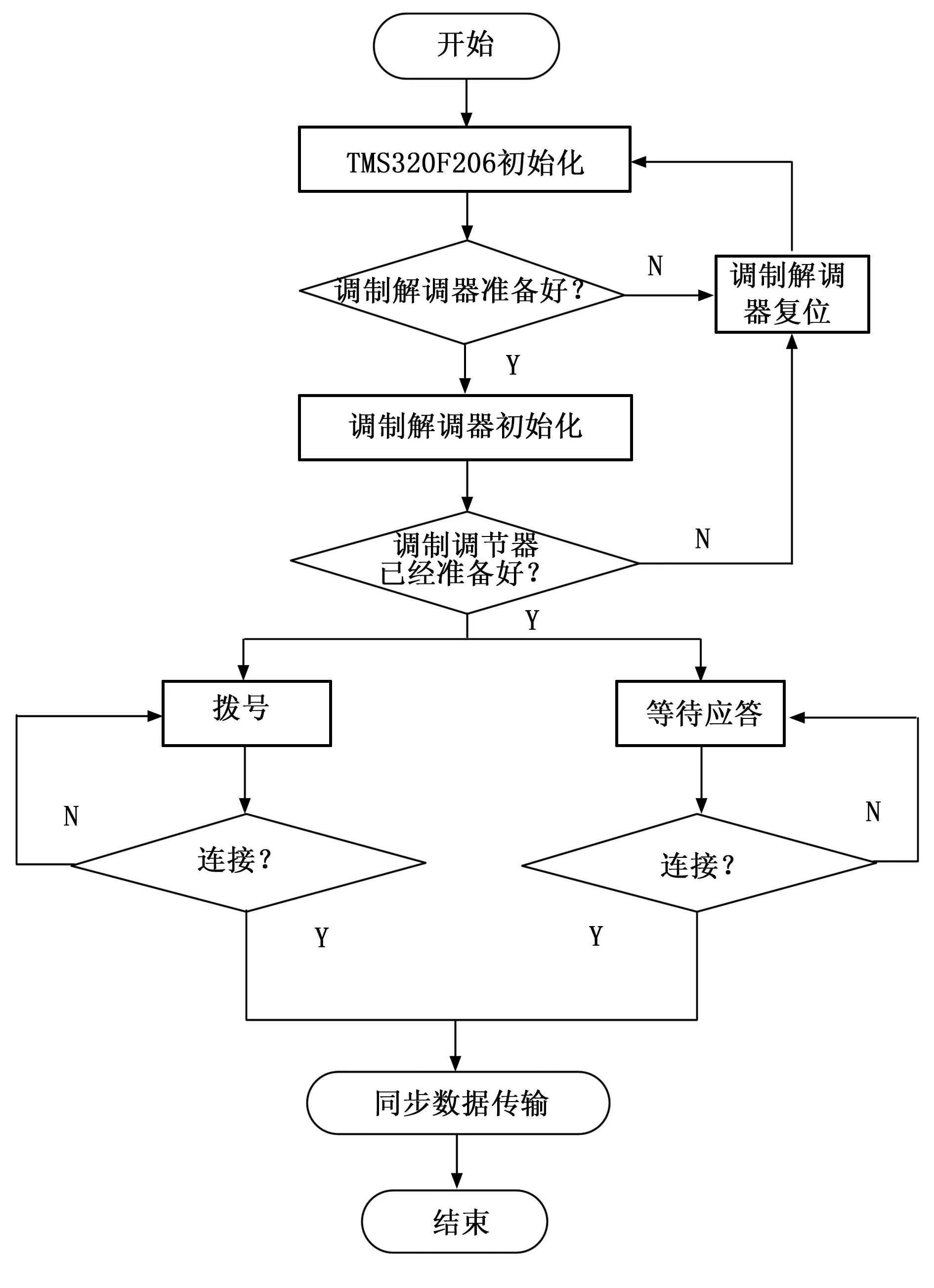
图6 TMS320F206 DSP程序流程
1)雷达信号相似度分析模型函数fi(x)初始化;
2)将硬件设备接收到的信息传送到硬件设备之中;
3)调用显示子程序,并实时显示接收到的雷达信号数量;
4)调用历史接收到的雷达信号特征,判断新接收到的雷达信号是否与历史特征一致。
5)如果是,则开始识别。否则,清除该信号;
6)雷达信号特征应具有最大可信度;
7)雷达信号特征最大可信度与其它信号特征可信度之差必须大于设定的阈值;
8)获取可信度最高的雷达信号特征,该特征下的雷达信号为最终识别结果。
在TMS320F206型号DSP设备支持下,设计具体实现流程,由此开始同步信号传输。跟踪车用主动防撞预警雷达信号,在获取新特征之后,及时判断并计算信号相似度。调用显示子程序和历史接收到的雷达信号特征,分析新接收到的雷达信号是否与历史特征一致,获取可信度最高的雷达信号特征,由此完成信号识别。
3 实验分析
防撞预警雷达信号识别精准将直接影响车用主动防撞预警雷达测距性能,因此,结合汽车上雷达分部情况进行基于机器学习的车用主动防撞预警雷达信号识别系统性能测试。
3.1 汽车雷达分布
各个子雷达在汽车上分布情况如图7所示。
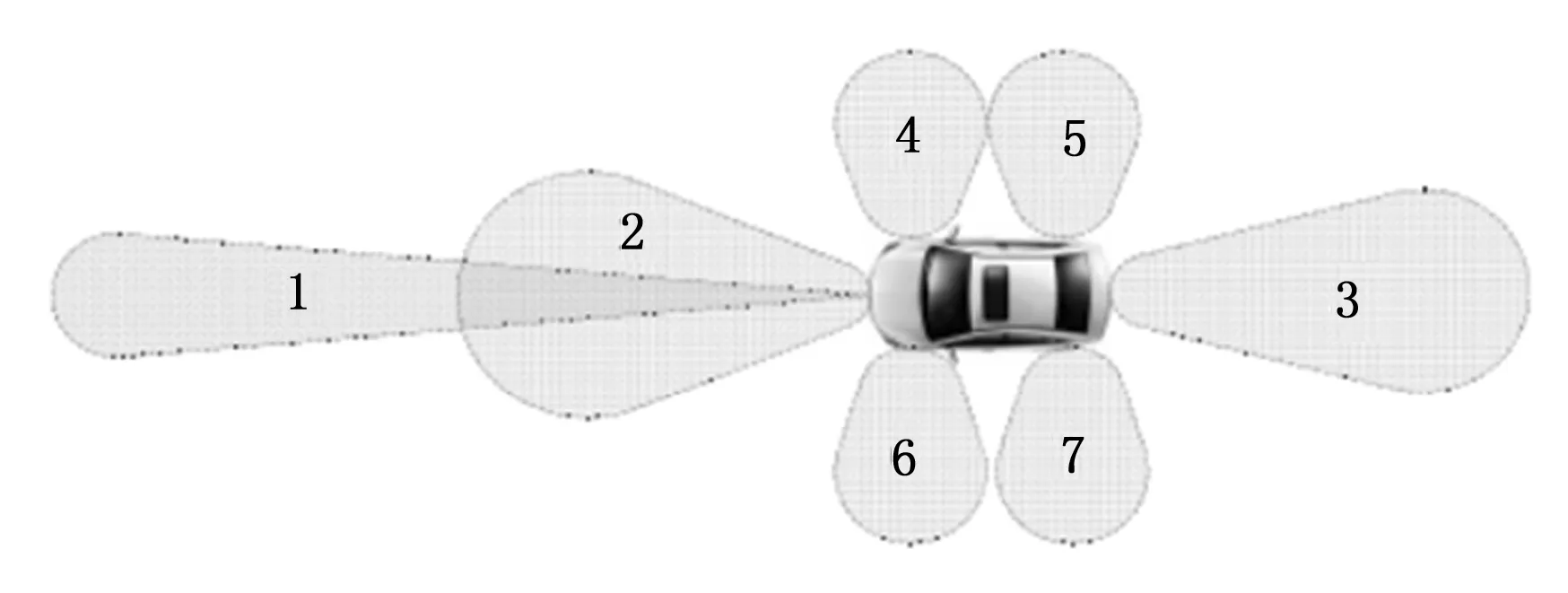
图7 各个子雷达在汽车上分布情况
图7中1号子雷达是远程Long range radar雷达,探测距离可达到250 m;2~7号子雷达是近程Short range radar雷达,探测距离小于35 m。1、2、3号雷达是对车辆前后测距;4、5、6、7号雷达是对车辆两侧盲点测距。远近程雷达探测性能指标如表1所示。
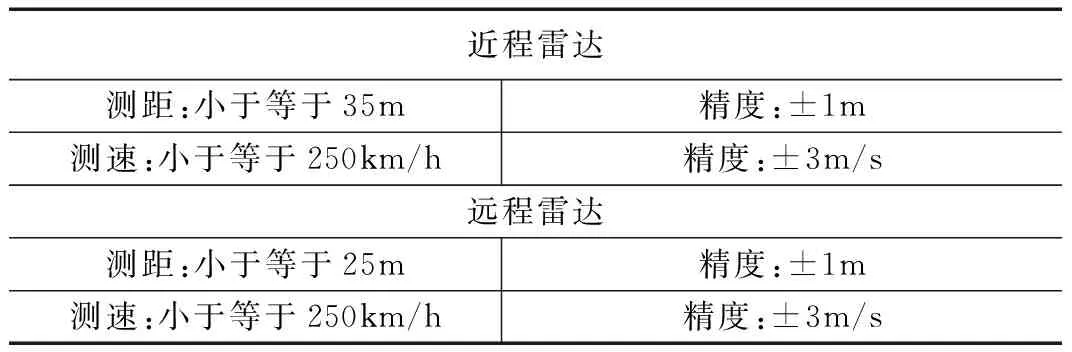
表1 远近程雷达探测性能指标
针对图7所示的各个子雷达在汽车上分布情况,分析发现概率、信噪比及虚警概率之间的关系,在虚警概率一定情况下,雷达信号信噪比越高,那么发现雷达信号的概率也就越大。若要使虚警概率变低,就必须提高雷达发现概率,使匹配滤波器输出足够高的信噪比,这对于后续雷达信号识别验证极为重要。
3.2 实验结果与分析
3.2.1 相向干扰
受到雷达天线设计影响,车用主动防撞预警雷达扫描方位角较小,使得靠近的两辆车反向行驶容易受到干扰,出现互扰现象,如图8所示。
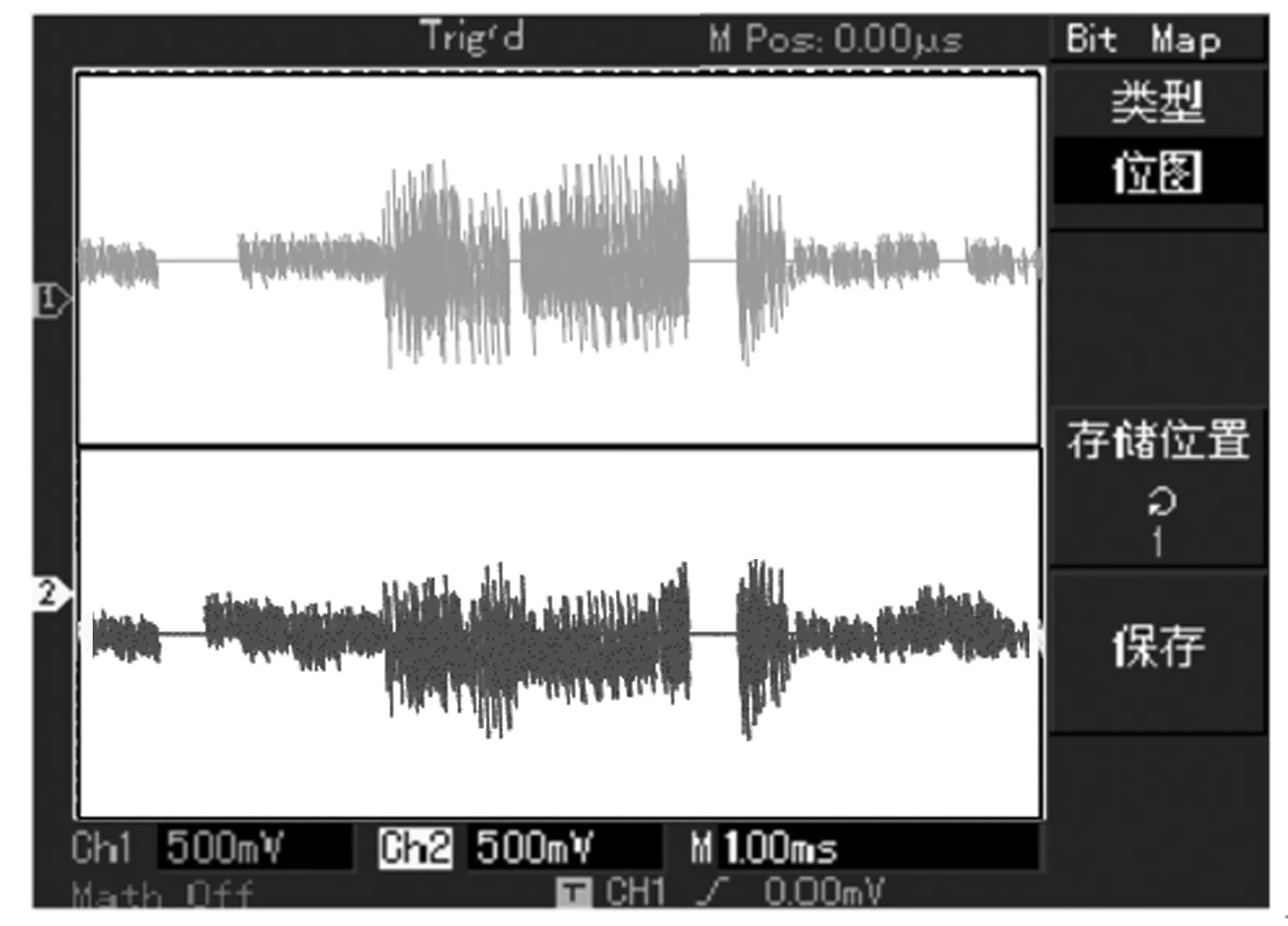
图8 相向干扰雷达信号接收频率变化情况
上半部分和下半部分分别表示车辆1和2,由图8所示雷达信号接收频率变化情况可知,两辆车在相向干扰情况下,子雷达1、2都出现短时间接收频率消失的情况下,且消失点基本一致。在该情况下,分别将激光扫描技术、红外技术、超声波技术和基于机器学习技术下的信号识别精准度进行对比分析,结果如表2所示。
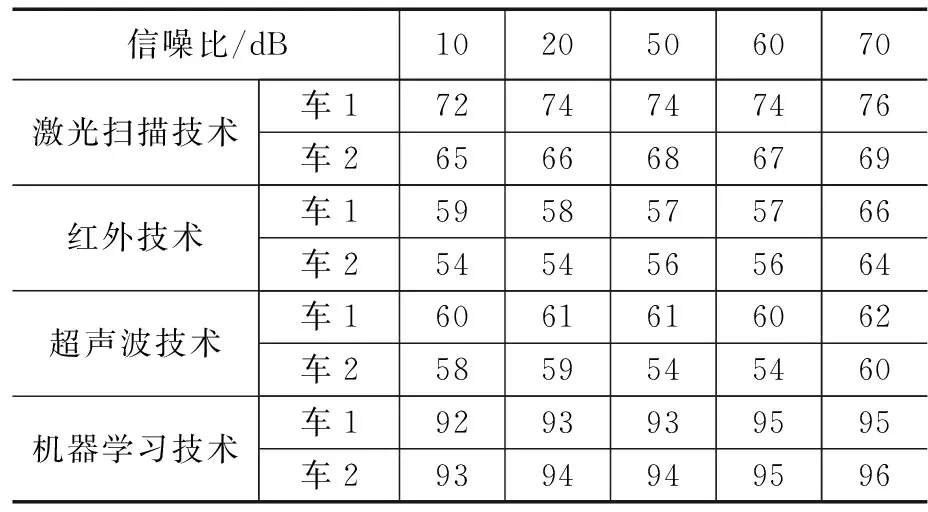
表2 相向干扰下不同技术信号识别精准度/%
系统信噪比越高,杂音就越少。因此,在信噪比为70 dB时,四种技术信号识别精准度都达到最高,其中激光扫描技术比红外技术和超声波技术要高,识别精准度保持在60%以上,而机器学习技术识别精准度保持90%以上。由此可得出结论:相向干扰下机器学习技术信号识别精准度较高,最高可达到96%。
3.2.2 同向干扰
同时装有防撞雷达装置的汽车同向行驶时,如果两辆车行驶距离过近,那么离得较近的两辆车雷达扫描范围就会落到对方扫描范围内,该车干扰系统的反射信号就会被另一辆车所接收,造成车辆误判,提高了雷达系统虚警概率,如图9所示。
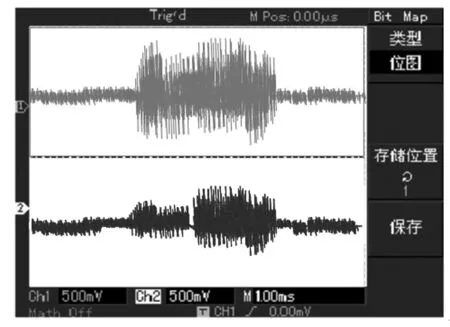
图9 同向干扰雷达信号接收频率变化情况
图9中的上半部分和下半部分分别表示车辆1和2,由图9所示雷达信号接收频率变化情况可知,两辆车在同向干扰情况下,子雷达4、5、6、7都出现接收频率较低的情况,在该情况下,分别将激光扫描技术、红外技术、超声波技术和基于机器学习技术下的信号识别精准度进行对比分析,结果如表3所示。
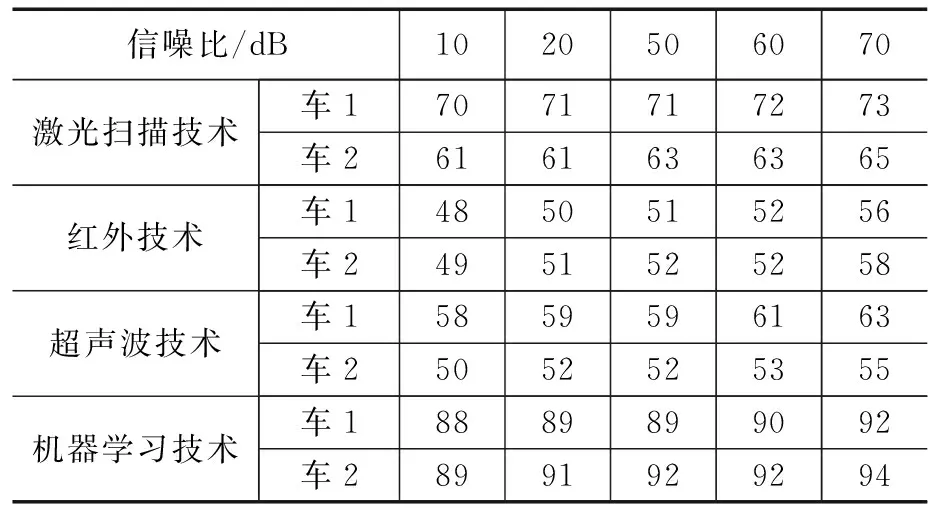
表3 同向干扰下不同技术信号识别精准度/%
由表3对比结果可知,使用激光扫描技术在不同信噪比下,两辆车雷达信号识别精准度最高为73%;使用红外技术在信噪比为70 dB下,两辆车雷达信号识别精准度最高为58;使用超声波技术雷达信号识别精准度最高为63%;使用机器学习技术雷达信号识别精准度最高为94%。由此可得出结论:同向干扰下机器学习技术信号识别精准度较高,最高可达到94%。
4 结束语
4.1 结论
近几年,随着汽车在人们日常生活中的普及,交通事故时有发生,为了防止该事故给人们生命安全带来的威胁,提出了基于机器学习的车用主动防撞预警雷达信号识别系统研究。该系统在设计的同时,干扰问题也成为雷达信号识别系统的热点问题,因此,提高系统抗噪性对于系统设计来说是具有重要意义的。针对雷达信号识别过程中的干扰问题,需根据数据集分布特征形成复杂聚类边界,具有良好推广能力,打破了传统系统识别精准度低的问题。
4.2 展望
由于实验环境受到限制,有关基于机器学习的车用主动防撞预警雷达信号识别系统设计,还有一些后续工作问题要做,主要有以下几个方面:
1)将主动防撞预警雷达信号识别系统安装在汽车上,结合天线模块现场测试,并校准处理。
2)系统设计主要是针对单个信号识别,而在实际工作环境中,雷达需要检测多个目标信号,由此引发雷达上、下差频配对问题。然而,由于车用主动防撞预警雷达扫频时间较长,信号识别会出现多目标跨越多个目标单元现象,从而导致雷达上、下差频无法配对。当前使用迭代算法虽然能够解决该问题,但耗费成本较高,这也是后续需要解决的问题。
3)设计的基于机器学习雷达信号识别系统除了探测雷达与探测目标之间距离外,还需测量多个方位角度。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2021年9期)2021-05-26
当代陕西(2020年24期)2020-02-01
科学与财富(2019年3期)2019-02-28
小猕猴智力画刊(2018年2期)2018-02-26
东方教育(2017年17期)2017-10-31
安徽农学通报(2016年20期)2016-12-26
科技与创新(2015年2期)2015-02-11