
熟料颗粒角速度实验及预测研究
2020-08-12 09:22鞠艳旭黄泊霖
硅酸盐通报 2020年7期
闻 岩,鞠艳旭,黄泊霖,袁 林
(燕山大学机械工程学院,秦皇岛 066004)
0 引 言
在水泥熟料冷却过程中,熟料颗粒在推料棒的推动作用下除发生移动外还产生旋转运动,增加了颗粒与空气间的换热面积,进而增大了整体的换热强度。因此,在水泥熟料的换热研究中,表征这种旋转运动程度的颗粒角速度规律是强化换热分析的重要参数之一。
关于颗粒运动对换热的影响,国内外一些学者进行了初步研究。李斌等[1]应用耦合的计算流体力学和离散单元法,分析了浸没管对喷动床内颗粒运动和换热特性的影响,研究表明浸没管增加了颗粒碰撞运动,提高了床内颗粒的平均温度。王志宇等[2]引入颗粒拟总温表征颗粒的平动和旋转速度脉动,建立了颗粒碰撞过程中平动和旋转运动共同作用的粗糙颗粒动力学模型,模拟研究了鼓泡流化床内粉煤颗粒的流动-反应过程。Hetsroni等[3]通过球形颗粒在加热壁面上顺流和逆流方向的滑动和滚动实验,研究了颗粒运动和旋转对加热壁面温度分布和湍流边界层传热的影响。Rokhman[4]考虑到颗粒的运动,在颗粒线速度、角速度和温度脉动二阶矩方程的基础上,将固相的运动方程和传热方程封闭起来,用湍流气体能量方程计算了载流介质的脉动特性。以上研究表明,在换热过程中,颗粒运动对换热效果具有较大影响,不能忽略。目前的研究大多对单个颗粒进行研究,颗粒群运动对换热影响的研究较少。
目前关于颗粒旋转的研究主要集中在理论分析和数值模拟[5-8],实验研究相对较少。杜敏等[9]通过搭建实验台,利用高速数字摄像设备观察撞击区域内固体颗粒的运动,得到了撞击流内颗粒的旋转特性。唐达生等[10]采用高速摄影技术对矿石颗粒提升管道内的旋转特性进行研究,研究发现颗粒旋转速度随水流速度和颗粒圆度的增大而增大,随颗粒粒度和密度的增大而减小。Yang等[11]通过颗粒悬浮实验,用高速摄像机记录了煤颗粒在透明管道中的运动,分析了非球形大颗粒在垂直流场中的动力学特性,实验结果表明,非球形大颗粒在垂直流场中旋转,降低了垂直气力输送中非球形大颗粒所需的流速。Hagemeier等[12]使用半页发黑示踪粒子估计二维流化床中的粒子速度和粒子旋转,得到了局部粒子碰撞速率以及单个示踪对的法向和角动量的相应变化。以上对于颗粒旋转的实验研究只针对单颗粒对象,且多采用高速摄像及图像处理技术,通过对颗粒图像的处理间接得到颗粒的旋转规律,由于相机角度、拍摄频率、焦距及图像质量等影响,计算得到的转速值不够精准;同时摄像机所得图像是二维图像,计算得到的是二维平面角速度,难以表征颗粒的三维旋转运动。
本文针对现有实验方案难以表征颗粒的三维旋转问题,以及颗粒群旋转速度实验数据分析方法问题进行研究,同时为理论研究提供一种新的实验验证方法。实验中采用将姿态传感器包裹在颗粒球体内的方法,通过蓝牙传递出颗粒角度变量,结合采样频率计算得到颗粒的三维旋转角速度。实际工程中熟料颗粒呈群状出现,颗粒群的流动速度具有多工况要求,难以将所有颗粒及多工况全部进行实验测定,因此在实验所得数据基础上,结合BP神经网络对熟料颗粒的角速度进行了预测,以此满足换热研究和实际工程的需要。该预测模型为水泥熟料流态换热及数值建模分析奠定了基础,同时对其他颗粒的角速度研究也具有一定的借鉴意义。
1 实 验
1.1 实验装置
实验装置根据SF篦冷机结构进行简化设计,如图1、图2所示。运动推料棒与滑块固定,调速电机通过连杆推动滑块,带动运动推料棒沿直线导轨做往复运动,颗粒料群在推料棒的往复作用下向前流动。在实验台左侧上部设计了料箱,其内填充颗粒以保证料层的连续流动。考虑到蓝牙信号传输问题,实验装置主体结构采用木质材料。

图2 实验装置实物图Fig.2 Experimental device
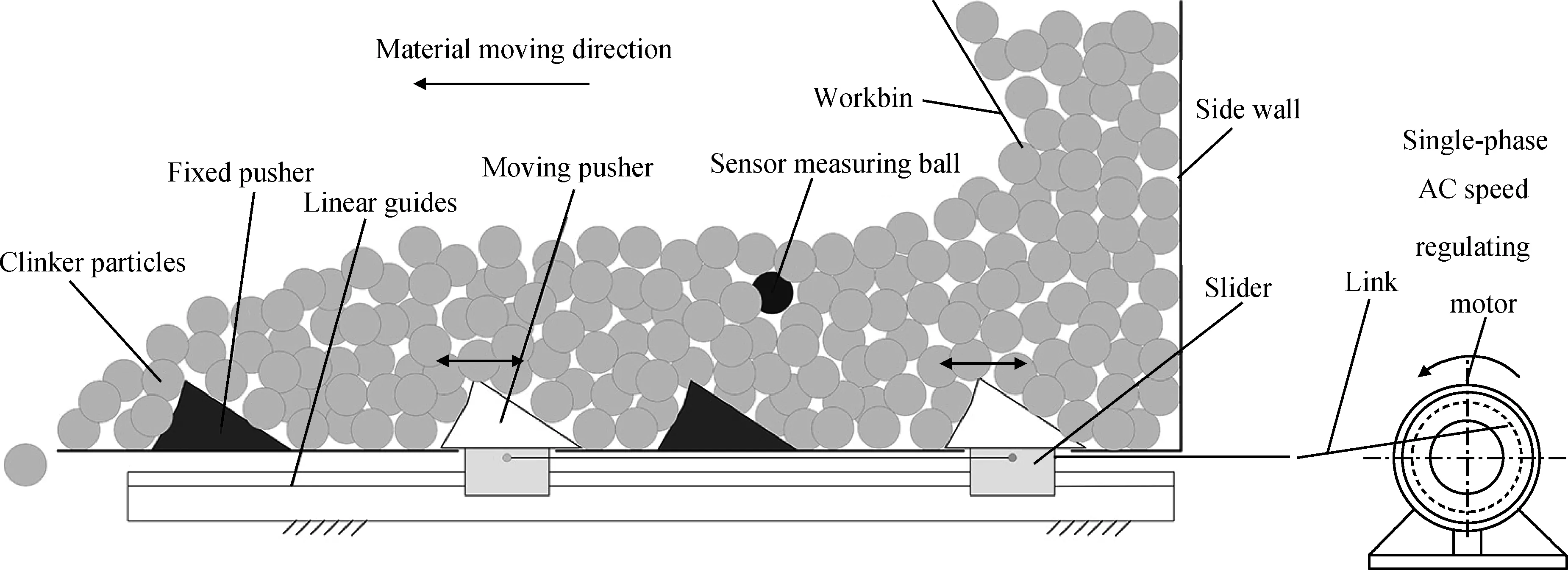
图1 实验装置原理图Fig.1 Schematic diagram of experimental device
实验颗粒群由30 mm高铝水泥球组成,传感器测量球是将蓝牙姿态传感器包覆于水泥,制作成与实验颗粒等径的球体。蓝牙姿态传感器如图3所示,其姿态信号由蓝牙模块拾取。
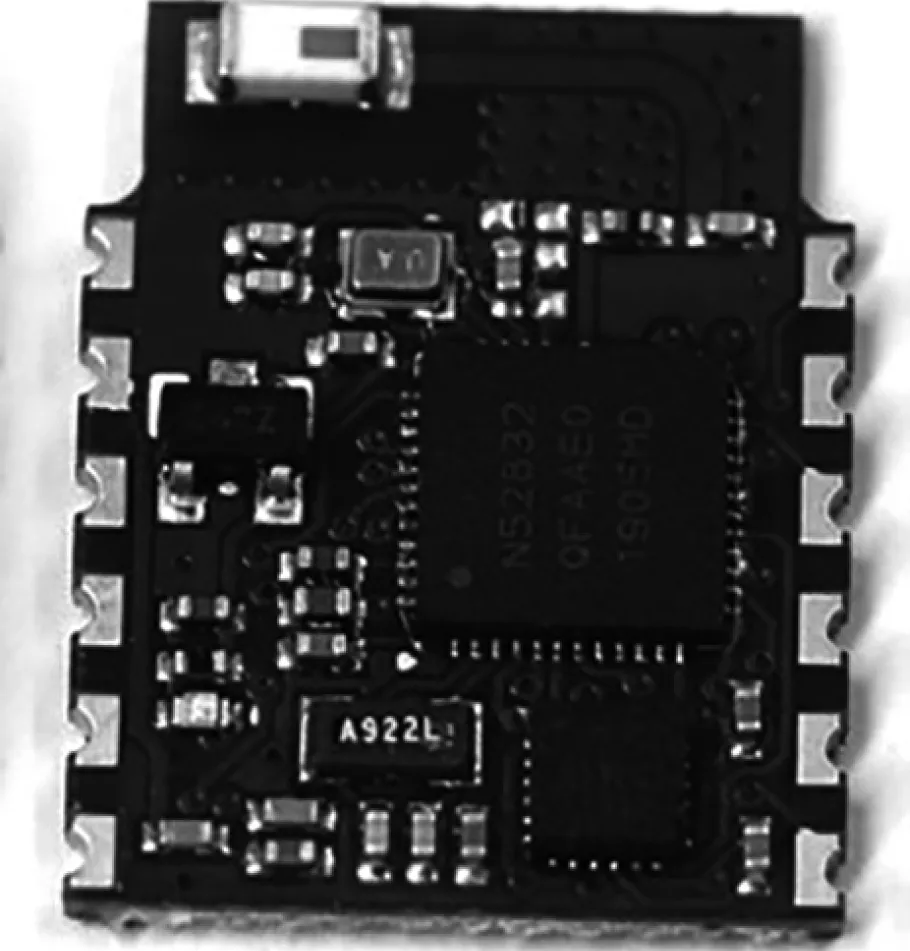
图3 蓝牙姿态传感器Fig.3 Bluetooth attitude sensor
1.2 实验过程
将5个传感器小球随机放在垂直于料层运动方向的5个位置,考虑到边壁效应的影响,传感器到侧壁留有一定距离,如图4所示。按照设定转速启动电机,待颗粒运行稳定后,运行姿态传感器采集软件记录角度数据,数据采集结果如图5所示,当传感器小球掉落后,停止本次数据采集。实验中所设定的电机转速分五级,使推料棒的往返速度分别为15 times/min、20 times/min、25 times/min、30 times/min、35 times/min。每个设定的推料速度及测量位置测量3次,实验共采集到75组数据。

图4 传感器测量位置图Fig.4 Sensor measurement location
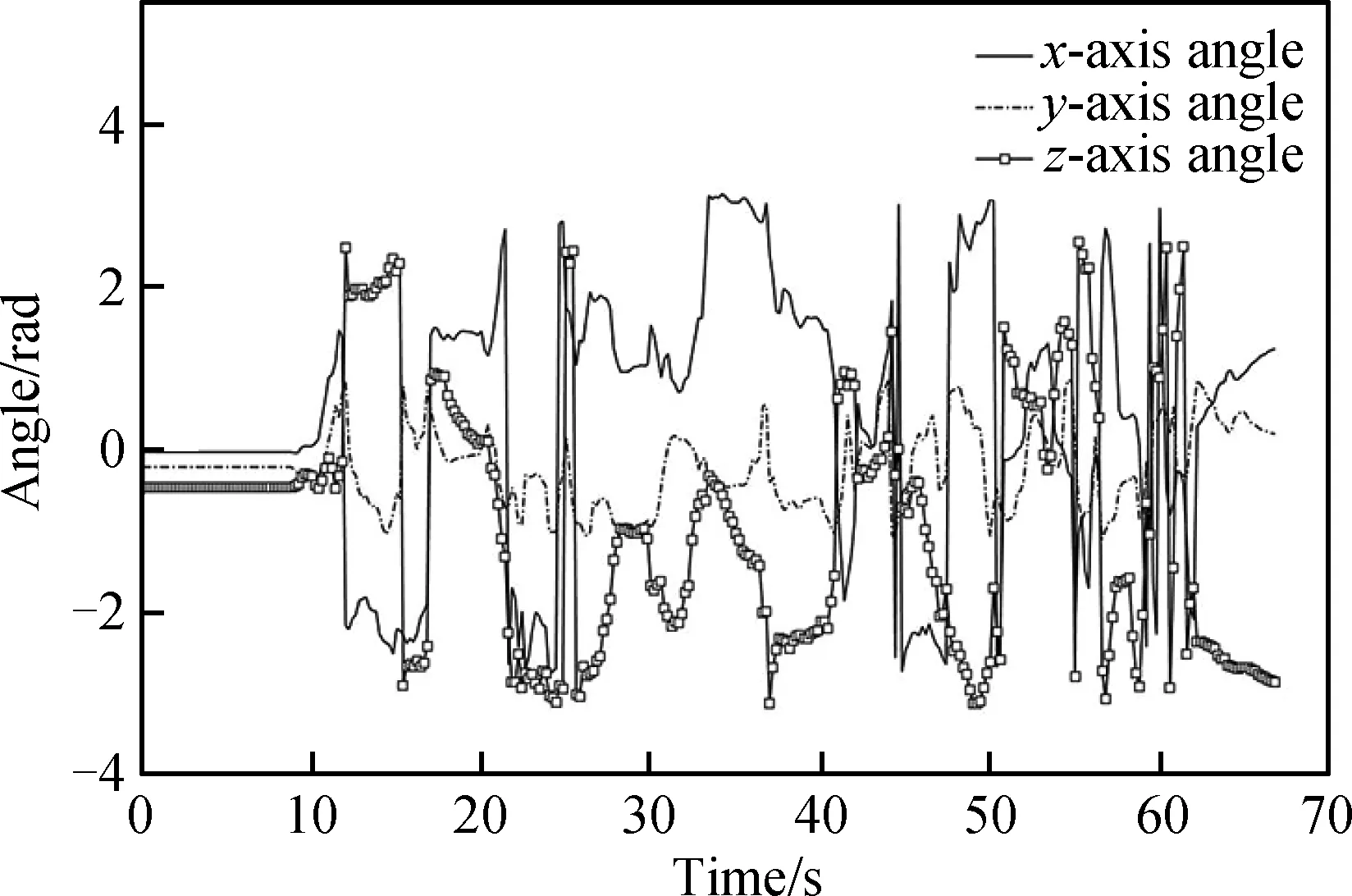
图5 数据采样图Fig.5 Data sampling diagram
1.3 实验数据处理
在水泥熟料换热过程中,当冷却流体流过颗粒缝隙时,在颗粒接触点附近会一直存在一个与其它边界不同的高温红点区,如图6所示。当颗粒料层处于流动状态时,红点区将脱离接触区,颗粒红点区成为流体通道的边壁,当流体通过时其换热强度将会增加,如图7所示。在之后的水泥熟料流态换热研究中,通过加入颗粒自旋速度因素来体现热交换强度的增加。熟料颗粒在推料棒的往复推动作用下,红点区随机转动,在换热研究中只需考虑红点区的脱离速度,即颗粒的自旋角速度,而不必考虑旋转方向。因此,在实验数据处理时只需计算不考虑旋转方向的颗粒总转角即可。
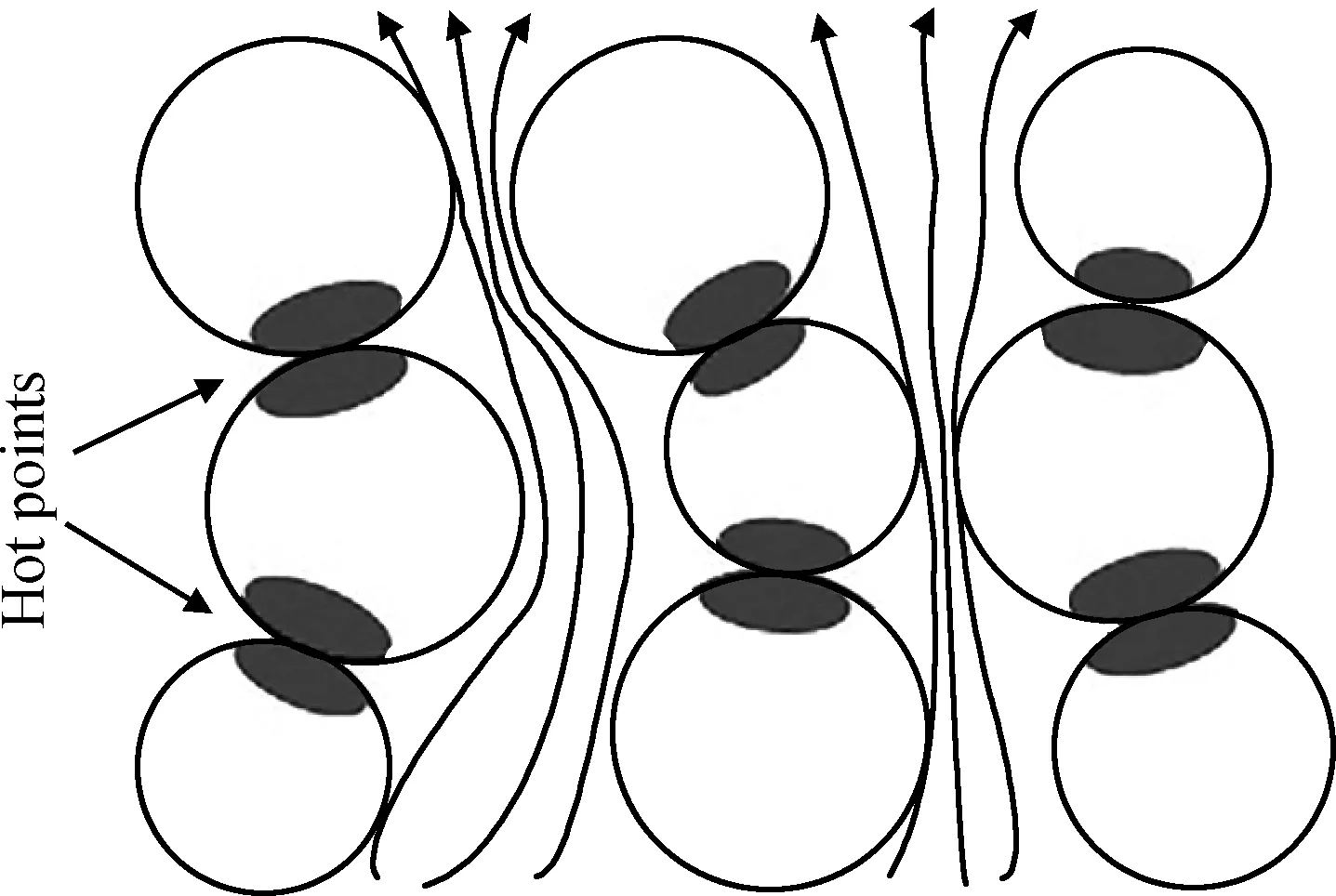
图6 静态红点区Fig.6 Static red hot points
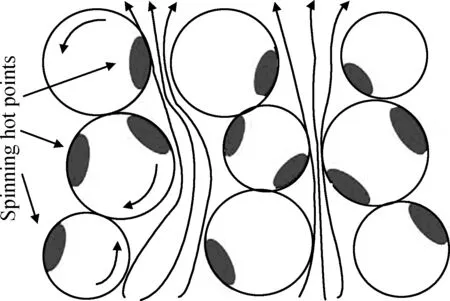
图7 动态红点区Fig.7 Dynamic red hot points
蓝牙姿态传感器采用欧拉角表示姿态,坐标系固定于传感器,随着传感器的运动而变化,每次采样的数据均以上次采样的坐标系为基准,经过坐标变换可以得到2次采样期间的颗粒转角。如图8所示,测量球从位置i运动到位置i+1,坐标系由XiYiZi变为Xi+1Yi+1Zi+1,此时测量得到的数据以XiYiZi坐标系为基准。

图8 传感器测量球坐标系Fig.8 Coordinate system of sensor measuring ball
坐标系旋转顺序为Z-Y-X,旋转矩阵如公式(1)所示,通过旋转矩阵变换,将角速度变换到同一坐标系下。颗粒的自旋运动可以通过颗粒上某一点的运动来表征,在颗粒自旋的过程中,该点从位置1运动到1′,则1与1′到球心的直线的夹角即为颗粒总转角β,如图9所示。坐标变换后根据余弦定理计算得到总旋转角度β,结合采样时间得到颗粒旋转角速度,取平均值后得到实验样本25组。

图9 颗粒总转角Fig.9 Total particle rotation angle

(1)
式中,R为旋转矩阵,ψ、θ、φ分别表示绕Z、Y、X轴旋转的角度值。
1.4 结果与分析
实验中发现,推料棒运动方向不同时,颗粒角速度发生明显变化,因此将推料棒的推程定为正向运动,返程为反向运动,将平均处理后得到的25组实验样本,按正反方向分为两组,得到50组实验样本。
根据实验数据,基于Matlab分别绘制正反向角速度关系图像,如图10~图15所示。
根据图10、图11,绘制出推料速度对颗粒角速度的影响,如图12、图13所示。
根据图10、图11,绘制出颗粒测量位置对颗粒角速度的影响,如图14、图15所示。
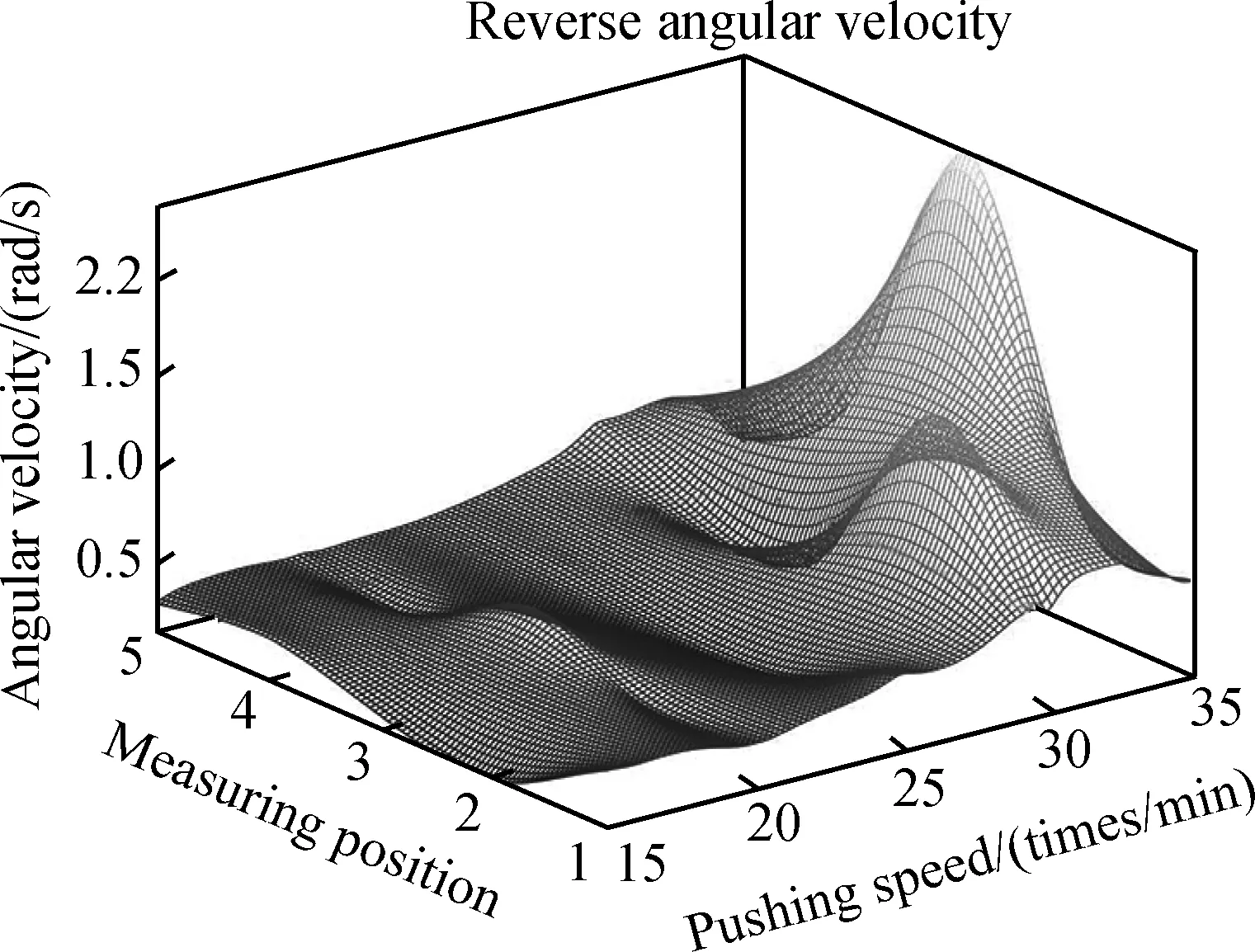
图11 反向角速度图Fig.11 Reverse angular velocity
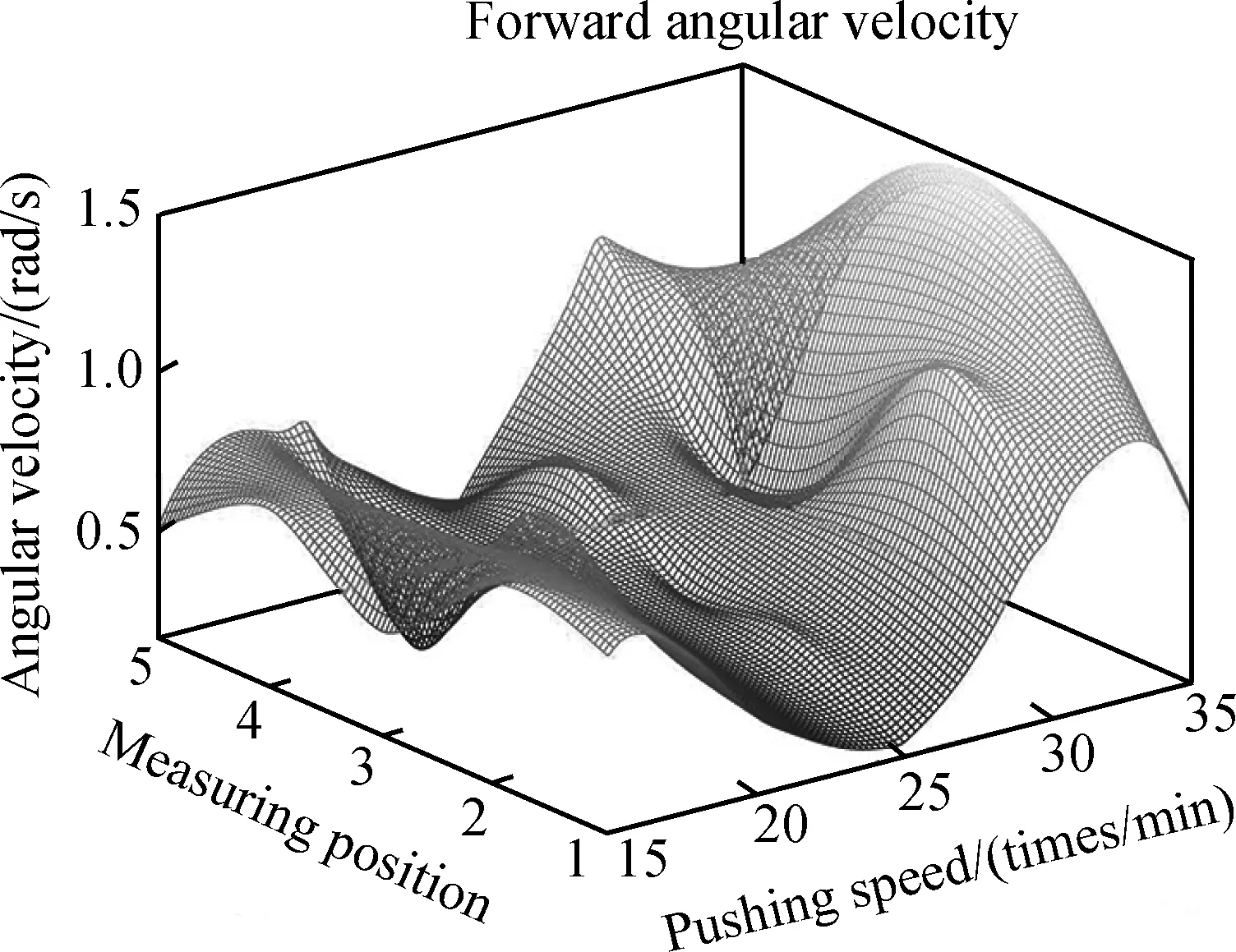
图10 正向角速度图Fig.10 Forward angular velocity
由图12、图13分析推料速度对颗粒角速度的影响,结果表明随着推料速度的增大,颗粒角速度逐渐增大,但正向角速度始终大于反向角速度。由图14和图15分析颗粒测量位置对角速度的影响,研究发现在不同推料速度条件下,正向及反向运动中间位置颗粒的角速度均大于两侧位置。
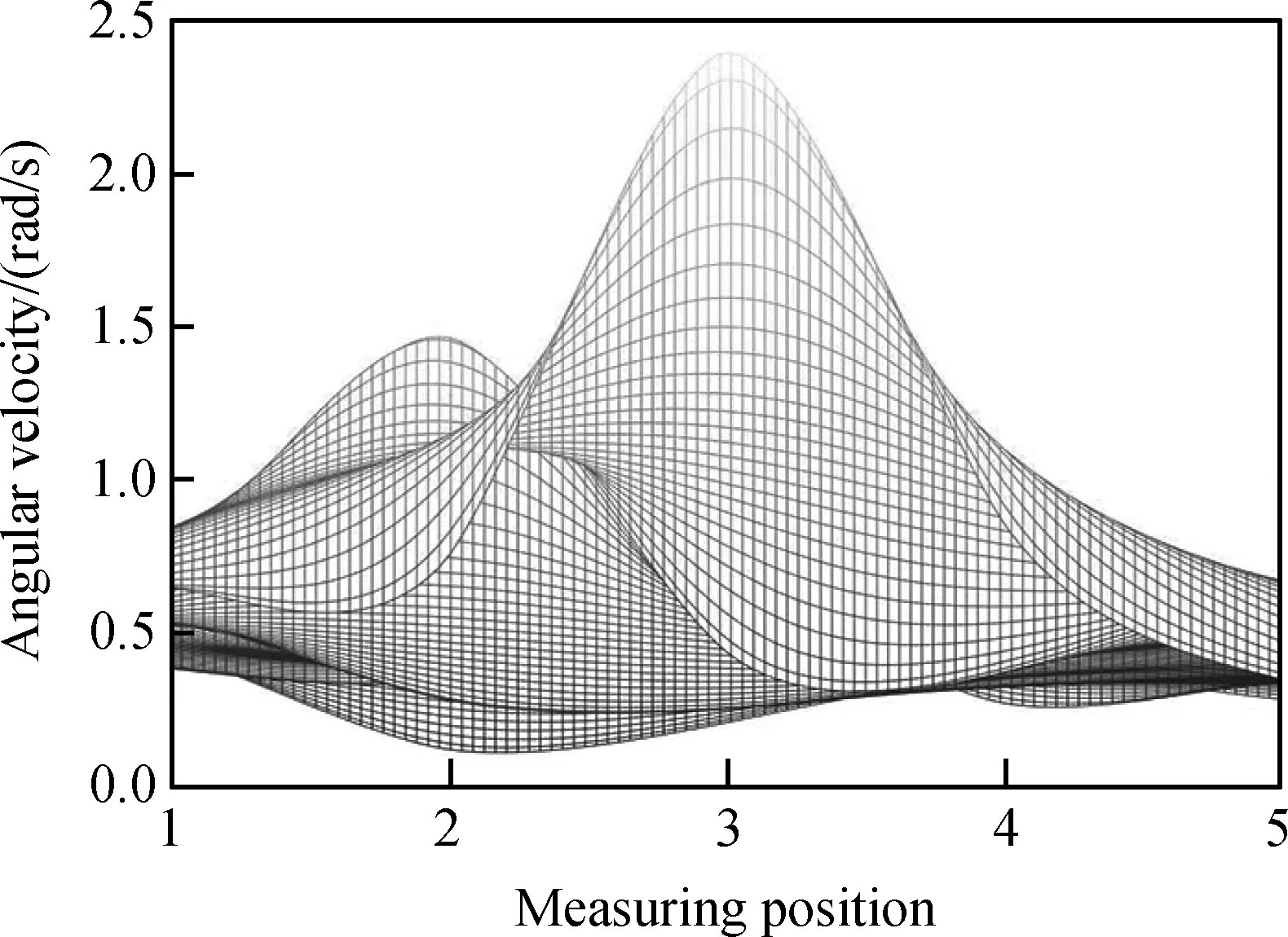
图15 测量位置对反向角速度影响图Fig.15 Effect of measurement position on reverse angular velocity

图14 测量位置对正向角速度影响图Fig.14 Effect of measurement position on forward angular velocity
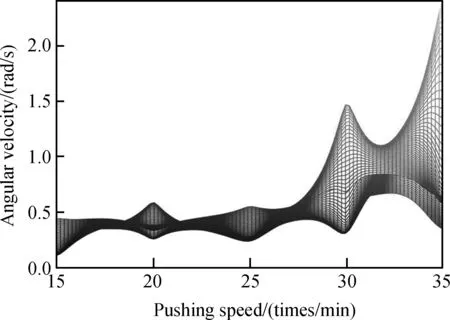
图13 推料速度对反向角速度影响图Fig.13 Effect of pushing speed on reverse angular speed

图12 推料速度对正向角速度影响图Fig.12 Effect of pushing speed on forward angular speed
实验数据表明,单颗粒旋转速度在一定范围内波动,但在实际工程中,换热分析更关注于颗粒群的运动,因此对实验颗粒组的角速度平均值进行了计算,得到了正反向平均角速度值,如表1所示。由表1计算得到,在一个推程内,颗粒自旋了1.068~1.577 rad,颗粒直径30 mm,一个推程内颗粒自旋了整个周长的17%~25%。

表1 正反向平均角速度Table 1 Forward and reverse average angular velocity
2 神经网络模型
BP神经网络是目前应用最广泛的神经网络,对于角速度问题的预测明显优于其他传统算法[13-16],因此本文将结合实验数据和BP神经网络,对熟料颗粒的角速度进行预测。
2.1 BP神经网络结构
反向传播网络(Back-Propagation Network,简称BP网络)是将W-H学习规则一般化,对非线性可微分函数进行权值训练的多层网络。结构包括输入层i,隐含层j和输出层k,如图16所示。其中X1,X2,…,Xn是BP神经网络的输入值,Y1,Y2,…,Ym是BP神经网络的输出值,ωij和ωjk为BP神经网络权值。
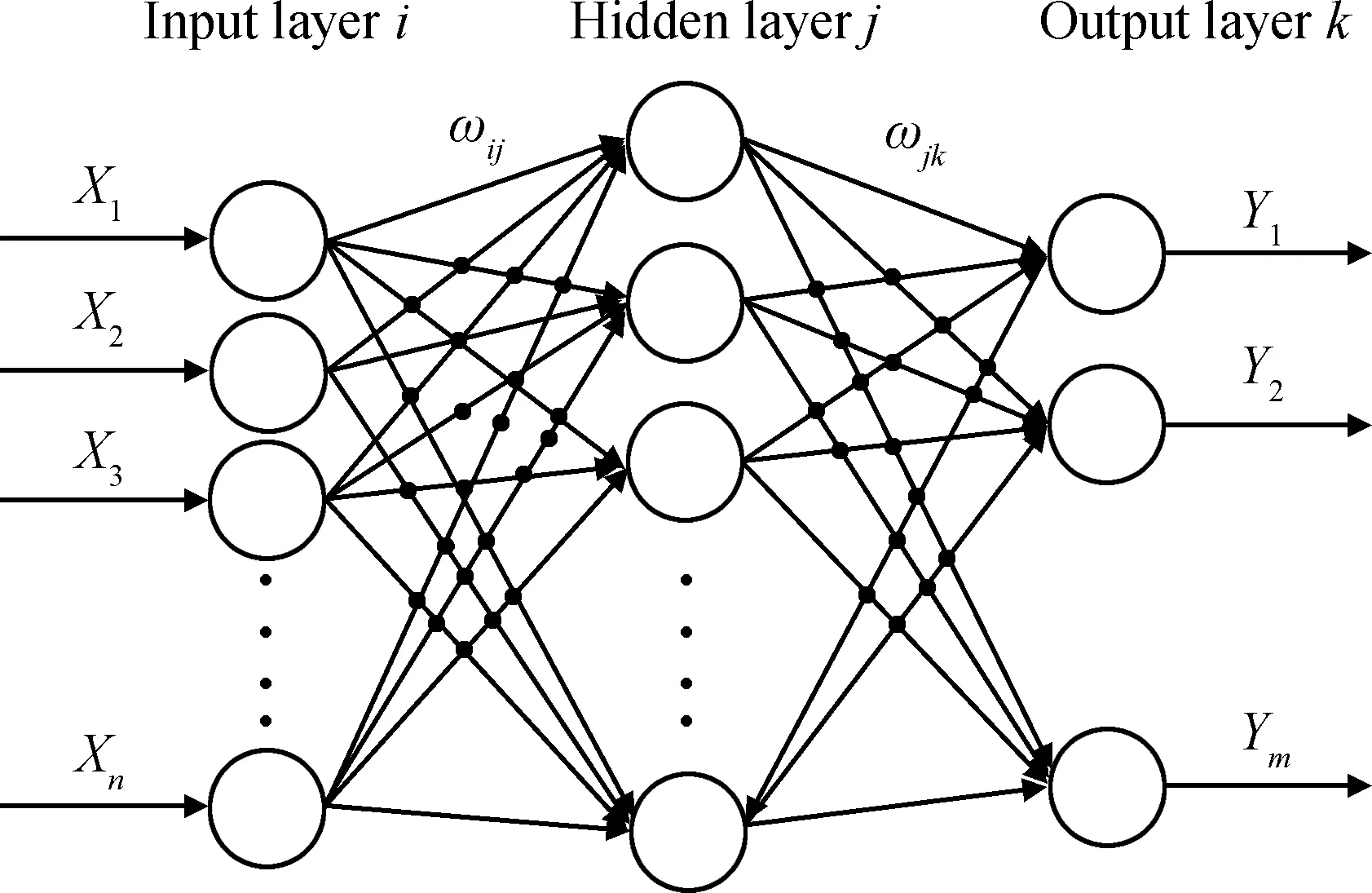
图16 BP神经网络结构Fig.16 BP neural network structure
2.2 BP神经网络模型的建立
将颗粒位置、推料速度和往返方向等影响颗粒角速度的3个主要因素作为输入参数,将颗粒角速度作为输出,构建一个3输入1输出的神经网络模型。利用Matlab神经网络工具箱,从50组实验数据中随机选取40组作为训练样本,对神经网络模型进行训练。然后选择其余的10组数据作为测试样本以考察网络的泛化能力。
2.3 结果与分析
通过对不同隐含层神经元数目的网络训练,确定最佳隐层神经元数目为5,训练结果如图17所示。当网络完成训练后,输入10组测试样本,验证所训练的网络是否具有良好的泛化能力,即能否合理地响应被训练以外的输入,角速度预测结果如图18所示。

图17 训练结果图Fig.17 Training results
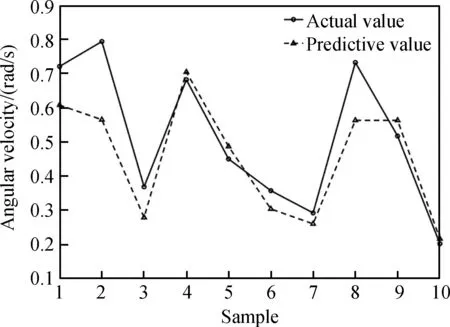
图18 角速度预测曲线Fig.18 Prediction curves of angular velocity
根据BP神经网络预测值,计算角速度相对误差,如公式(2)、(3)所示。
(2)
(3)

经计算,角速度相对误差小于30%,平均相对误差为14%,相对误差曲线如图19所示。

图19 角速度相对误差曲线Fig.19 Relative error curve of angular velocity
3 误差分析
实验误差主要来源于传感器测量球,由于测量球内部嵌入传感器,使得重量相对于实心水泥球下降了5%左右,对小球的旋转运动有一定影响。但在熟料流动换热研究中,由于颗粒角速度误差对换热影响较小,因此可以忽略其影响,且在之后的研究中可采用体积更小的传感器进行测量,以进一步降低系统误差,因此本实验方法及数据处理是有效的。
4 结 论
(1)通过自主设计的实验装置对颗粒角速度进行了实验测量,研究结果表明颗粒角速度随推料速度的增大而增大,正向运动角速度大于反向运动角速度;在一个推程内,颗粒自旋了1.068~1.577 rad,占颗粒周长的17%~25%,对颗粒堆积体换热有较大影响,在水泥熟料换热研究中必须考虑颗粒的自旋运动。
(2)建立了BP神经网络模型,并利用实验数据对颗粒角速度进行了预测,平均相对误差为14%,该模型有效地预测了颗粒的角速度,为水泥熟料流动换热研究提供了分析和实验验证基础。
猜你喜欢
建材发展导向(2022年1期)2022-03-08
水泥技术(2021年6期)2021-12-31
江西建材(2020年12期)2020-02-15
水泥工程(2020年2期)2020-01-04
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
中学生数理化·高一版(2017年3期)2017-07-08
重型机械(2016年1期)2016-03-01
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
