采煤机牵引部双电机协调控制方法的研究
2020-08-21 04:45陈静
机械管理开发 2020年8期
陈 静
(山西焦煤西山煤电股份有限公司西曲矿, 山西 古交 030200)
引言
煤炭产业在我国国民经济的发展中占有重要地位,有研究表明未来较长时间内煤炭仍然是主要的一次性能源[1-2]。采煤机作为煤炭开采的主要设备,随着科技的不断进步,其在行走机构传动方式和牵引部调速两方面都取得了重要改变[3],调速方式由早期的直流调速逐渐改变为交流调速。随着采煤机功率的不断增大,对牵引部电机功率提出了更高要求。对于大功率电机,一方面由于可靠性相对较差,且价格昂贵,另一方面由于采煤机井下工作的特点,受空间限制,大体积的电机不适合在采煤机牵引部应用。针对上述问题,出现了用两台交流电机一起驱动采煤机牵引部的情况。早期使用同一变频控制器对两台电机进行控制,由于控制效率低,精度不高等缺点,后面逐渐采用一个变频器控制一个电机,并且被广泛使用在大型电牵引采煤机上。
双电机主从同步牵引方式很好地解决了采煤机牵引部功率不足的问题,但同时由于两台电机制造误差的存在,电机参数不可能完全一致,使得两台电机在使用过程中功率偏差,造成电机过载损坏现象,因此有必要对双电机协调控制方法进行研究,以提高系统控制精度。
1 采煤机牵引部工作原理
图1所示为采煤机牵引部工作原理图,主要包括调速系统、行走箱、动力传递系统三个部分[4]。调速系统由两个牵引电机控制系统组成,一个电机对应一个变频器;行走箱中包含有驱动轮和销轮等;动力传递系统包括牵引电机和齿轮传递系统。
工作过程中,控制信号首先传递给电机控制器,电机控制器再通过逆变器将变压信号传递至驱动电机,从而驱动左右两侧销轮在销轨上的运动。

图1 牵引部工作原理图
2 异步电机数学模型的建立
为了对采煤机牵引部双电机协同控制方法进行深入研究,首先需要建立合适的三线异步电机数学模型。由于异步电机系统比较复杂,具有高阶、强耦合、非线性等特点[5],一般通过坐标变换将三线静止坐标转化成两相坐标,从而达到对系统简化的目的。模型的建立过程中做出如下假设[6]:不考虑铁心磁饱和、磁滞的影响,电机铁心的导磁系数为常数;定子、转子三个绕组结构上相同,空间位置相互间相差120°;在建立的模型横、纵坐标中,电机转子具有对称结构,因此电磁磁路在空间上完全对称;在气隙空间中,转子绕组和定子绕组产生的磁动势呈正态分布。
通过上述假设,对三相异步电机进行简化后,得出其数学模型为[7]:
定子电压方程:
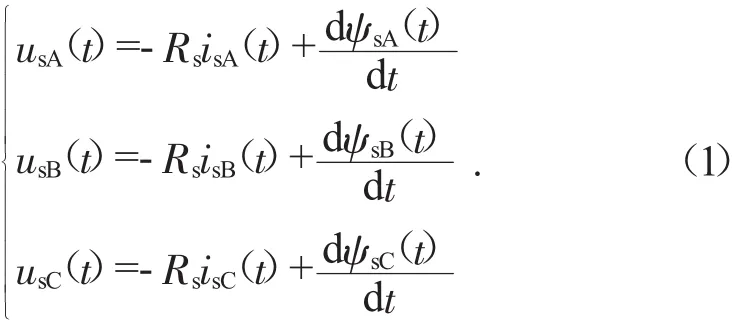
式中:usA、usB、usC分别为三线异步电机定子绕组电压;Rs为定子绕组电阻;isA、isB、isC分别为三线异步电机定子绕组电流;ψsA、ψsB、ψsC分别为三线异步电机定子绕组磁链。
转子电压方程:
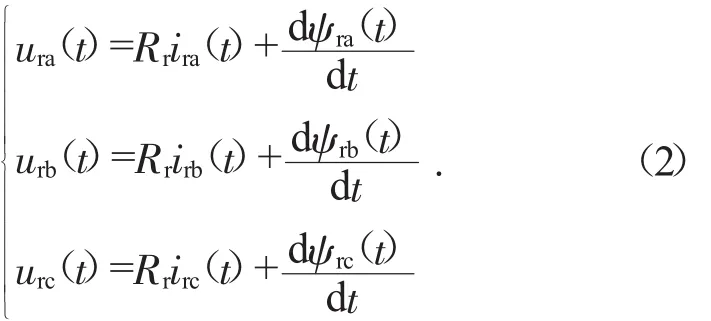
式中:ura、urb、urc分别为三线异步电机转子绕组电压;Rr为转子绕组电阻;ira、irb、irc分别为三线异步电机转子绕组电流;ψra、ψrb、ψrc分别为三线异步电机转子绕组磁链。
定子磁链、转子磁链、绕组电流三者之间的关系式如下:

式中:ψs、ψr分别为定子和转子绕组磁链矩阵;is、ir分别为定子和转子绕组电流矩阵,Lss、Lsr、Lrs、Lrr为电感矩阵。
电机转子运动方程为:

式中:Ωr为转子转速,rad/s;Tj为发电机的转动惯量,kg·m2;Tm为机械力矩,N·m;Te为电磁力矩,N·m。
通过电流与磁链间的关系,对上式转换得:

式中:Np为极对数。
上述式(1)—(5)组成了异步电机数学模型,由于模型阶次较低,从而达到了简化模型的目的。
3 仿真分析
异步电机矢量控制原理就是分别将定子电流和转矩分量作为控制量,先通过矢量旋转变换为两相交流控制,再通过2S/3S(二相、三相矢量)变换得到三相电流控制量,从而利用三相电流控制量来控制三相交流异步电机。本文利用Simulink建立采煤机牵引部双电机仿真模型,应用ode45算法对不同控制方法进行研究分析。
图2所示为异步电机并行控制原理框图,其控制过程中通过分别给主、从电机输入控制信号,避免两电机接收信号时发生延迟现象,即两电机跟随信号由同一控制器发出。并行控制与传统主从控制相比较,其优点是减少了从电机响应滞后时间,在启动、调速以及停止阶段具有良好的同步性。

图2 并行控制框图
根据上述方框图,应用Simulink建立仿真模型,主、从电机负载均设置为50 N·m,在仿真到5 s时,输入转速由60 rad/s阶跃至90 rad/s,得到其转速偏差如图3所示。

图3 转速偏差仿真图
从图3中可以看出,在输入转速突变后并行控制中的两异步电机仍然能够保持很好的同步性,转速始终在零附近上下波动;传统的主从控制在两电机同时输入转速信号后出现了1.5 s左右的延时。
图4所示为电机1在受到随机负载扰动5 s时,电机1和电机2的响应曲线,从图4中可以看出并行控制虽然具有自身优点,但是由于系统为开环控制,当某一电机受到外界扰动时,电机之间的同步偏差较大,两电机的最大转速差接近8 r/min。
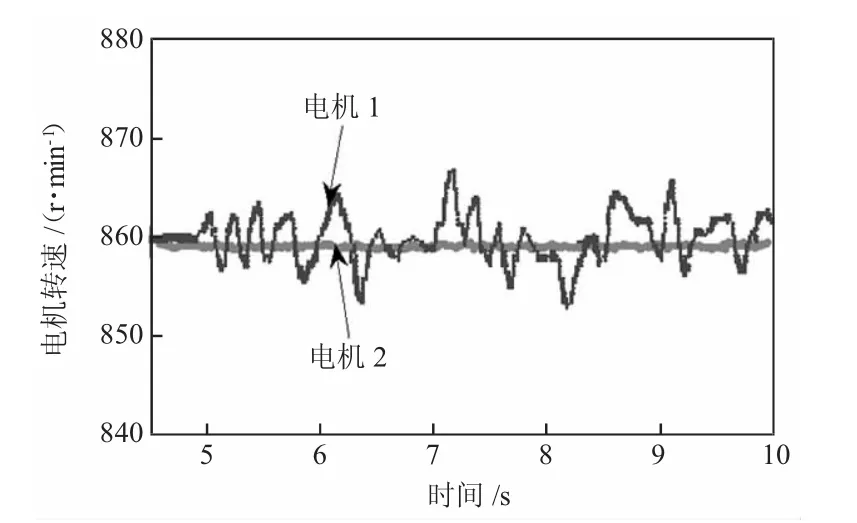
图4 电机1受扰动时两电机的响应曲线
为了解决上述问题,本文采用双电机耦合控制方式,将两台电机实际运行过程中的转速差作为附加信号,输入到转速调节器中,从而消除两电机实际运行转速差,提高电机的同步控制精度,交叉耦合控制原理如图5所示。

图5 交叉耦合控制原理框图
利用交叉耦合控制原理图建立仿真模型,在同样的仿真条件下,电机1在受到随机负载扰动5 s时,电机1和电机2的响应曲线如图6所示。从图可以看出,交叉耦合控制下电机1受到负载扰动后,两电机的实际转速始终能够保持较好的同步,分析原因主要是由于控制系统中增加了速度耦合控制器,将两电机转速差信号同时输入到了速度调节器中,从而使得任意一台电机受到外界扰动,另一电机都能够实现良好的跟随。
4 结论
1)主从控制两电机同步性较差,特别是启动阶段从动电机出现了严重滞后现象;
2)并行控制能够很好地解决两电机之间出现的滞后现象,但是当主电机受外界扰动后,两电机的同步性不能得到很好的保证;
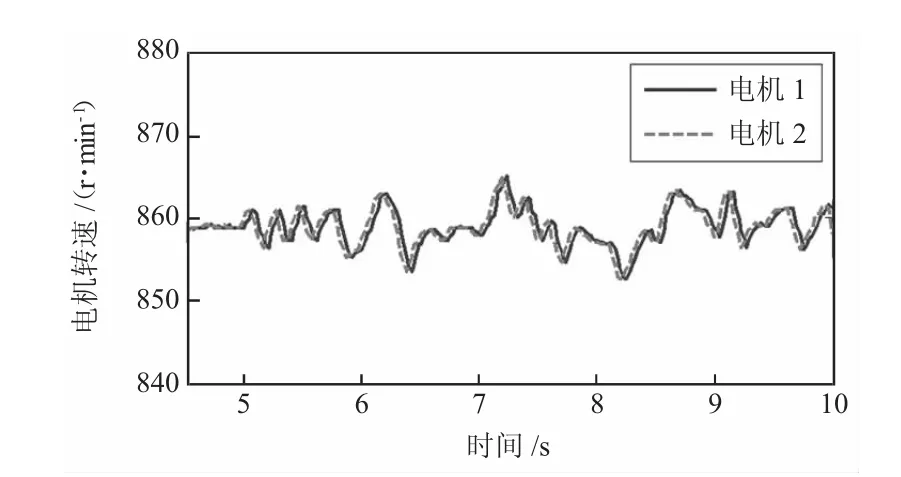
图6 电机1受扰动时两电机的响应曲线
3)交叉耦合控制不仅解决了两电机出现的滞后现象,并且在主电机受到干扰后,从电机能实现及时良好的跟随,使得牵引部有了更强的适应性。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
会计论坛(2020年2期)2020-08-14
医学研究杂志(2015年11期)2015-06-10
医学研究杂志(2015年11期)2015-06-10
组合机床与自动化加工技术(2014年10期)2014-03-01