
基于音圈电机的鲁棒控制器设计与仿真
2020-08-25 02:06胡永珊李志涛谢求泉罗志良
机械工程与自动化 2020年4期
胡永珊,李志涛,谢求泉,罗志良
(江西工业工程职业技术学院 机械工程学院,江西 萍乡 337000)
0 引言
音圈电机(Voice Coil Motor,VCM)是一款由单相直流电直接驱动的直线电机,可以实现高速高精度且力波动较小的定位运动,由于没有复杂的机械结构,现在普遍运用在三维运动平台的Z轴,并搭配力-位置切换控制算法进行推压力控制。
鲁棒控制主要用于那些被控对象存在高频动态不能建模以及系统存在一些不确定性参数等问题的运控系统,其最核心的概念是得到被控对象的数学模型,分析系统具有的不确定因素和摄动,通过对被控对象的伯德图分析,选取相应的加权函数,使系统能够快速响应动态指令,并在一定的干扰下可以快速恢复自身的稳定性,从而保证点到点运动的精准定位。
在进行鲁棒控制器设计时,最重要的是在对应的频域段选取被控对象的不确定性上界函数和被控对象的性能加权函数,并要满足系统抑制干扰能力强、动态过程响应快和稳态过程整定精度高的性能要求;其次就是要尽量使所设计的鲁棒控制器传递函数的阶次低。为此,本文对基于音圈电机的鲁棒控制器进行设计与仿真。
1 建立音圈电机数学模型
在高速高精密的三维运动平台中,音圈电机一般运用在Z轴,由于音圈电机没有自锁结构,每次下使能时,动子会因自身重力而往下掉,并且不易确定其运动初始位置,所以在工程应用时会用一个拉力弹簧或恒力气缸来平衡动子的重力,使音圈电机的动子在去使能的状态下可以处于一个固定的初始位置。所以在对音圈电机构建数学模型时,可以将被控对象构建成一个质量-阻尼-弹簧系统(MFK系统),音圈电机力学模型如图1所示。图1中,FK为拉力弹簧的弹簧力,FG为电机动子的重力,FC为系统的阻尼力,F为电机产生的推拉力,y为动子的位移。
根据音圈电机工作原理,其等效电路模型如图2所示。图2中,U为音圈电机的母线电压,E为音圈电机运动时产生的反电动势,L为动子线圈等效电感,R为动子线圈等效电阻,I为流经动子线圈的电流。
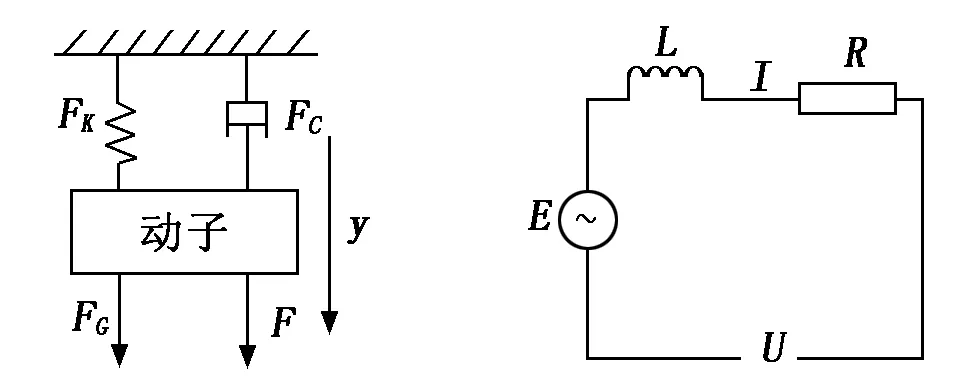
图1 音圈电机力学模型 图2 音圈电机等效电路模型
根据等效电路模型可以推导出音圈电机母线电压平衡方程式:
(1)
其中:t为时间;B为定子产生的磁感应强度;l为动子线圈长度;v为动子的运动速度。
根据电机力学模型可以得到音圈电机力学平衡方程式:

(2)
其中:m为动子线圈的质量;y为动子的运动位移;C为电机的等效阻尼系数;k为弹簧的弹力系数;g为重力加速度。
将式(1)和式(2)进行拉氏变换后再整理数据,就得到了音圈电机关于输出运动位移y与相线输入电压u之间的数学模型,其传递函数P(s)表达式为:
(3)
2 系统辨识
在进行鲁棒控制时,先要对被控对象进行系统辨识,得到被控对象的标称数学模型。一般在工程设计中均采用扫频的方式来分析和获取被控对象的模型参数,扫频时常选用的激励信号有正弦波、PBRS和Chirp等。
正弦扫频是将整个运控系统处于开环控制状态,利用运动控制器产生一组模拟量电流信号来激励音圈电机来回运动,并采集光栅尺的位置信号。该激励信号是由一组在0 Hz~2 000 Hz的频率段内间隔一定步距的模拟量电流信号组成。
将运控系统采集的模拟量电流信号和音圈电机光栅尺的位置信号进行快速傅里叶变换,并在MATLAB里画出伯德图,如图3所示。利用图3可以在频域里分析被控对象的幅值特性和相角特性。
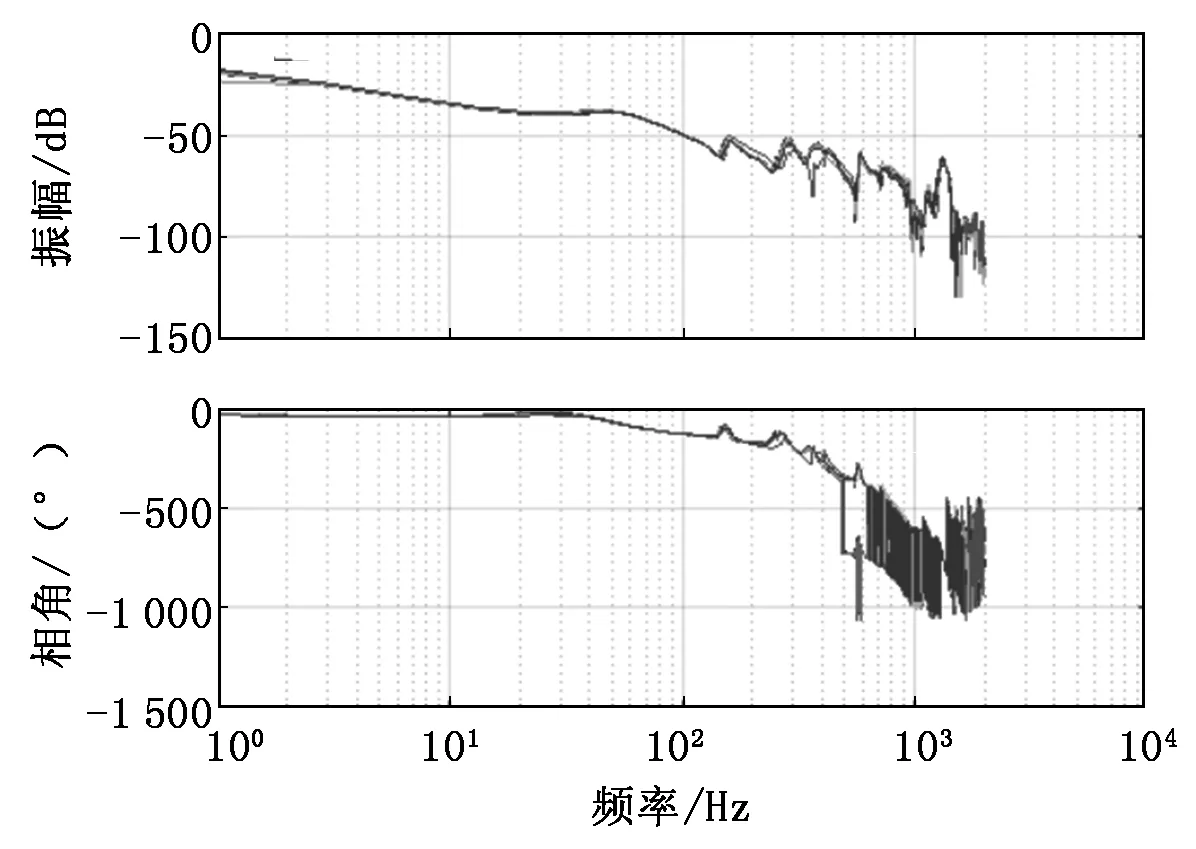
图3 音圈电机经正弦扫频得到的伯德图
将经过快速傅里叶变换处理后所得到的频率、幅值和相角等数据导入MATLAB软件中,使用MATLAB系统辨识ident工具箱,通过分析被控系统的频率特性曲线图进行最小二乘法拟合。
拟合方式选用零极点配置方式。通过选用不同组合的零点和极点,与被控对象的数据进行最小二乘法拟合。分析经多次拟合后的效果,选取其中匹配度最高的那组零点和极点。最后拟合结果匹配度最高的是3个极点和0个零点,这也正好可以验证机理数学建模的合理性。最终被控对象音圈电机所确定的数学模型的传递函数为:
(4)
对得到的传递函数进行频域分析以及动态响应性分析,并对扫频所得的数据进行不确定性及扰动分析,为鲁棒控制器设计做准备。
3 鲁棒控制器的设计
根据运控系统要求的性能指标和鲁棒稳定性,选择用H∞混合灵敏度方法来设计控制器,其控制结构如图4所示。图4中,W1、W2和W3为系统的加权函数,z1、z2、z3为系统的评价函数,Δ1、Δ2和Δ3为系统存在的不确定性扰动,R1(s)为规划位置输入,e为位置跟踪误差,K(s)为H∞控制器,P(s)为被控对象标称传递函数,u为H∞控制器输出,d为控制对象输出的测量噪声,w1、w2、w3为Δ1、Δ2和Δ3的输出,Y(s)为实际位移输出。
加权函数W1、W2和W3的标准框架如式(5)所示:
(5)
其中:G(s)为广义被控对象;y为Y(s)控制器输出。
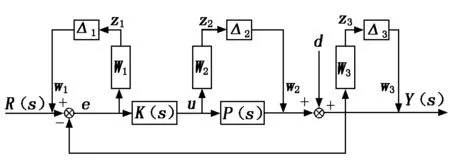
图4 被控对象基于混合灵敏度控制的控制器结构
鲁棒控制器性能的好坏依赖于权函数的选取。在选取加权函数时要注意各加权函数的特点:W1主要用来抑制系统的高频噪声以及权衡高频域中因不能建模的不确定性因素,所以该传递函数具有高通特性;W2用来抑制外界低频干扰,确保系统在运行中有较好的抗干扰能力和定位误差跟随调节能力,所以该传递函数具有低通特性;W3用来防止系统出现动态跟随误差输出过大和稳态时积分过饱和而导致被控对象出现过冲或震荡的现象。
最终选取的三个加权函数如下:
(6)
三个加权函数的伯德图如图5所示。
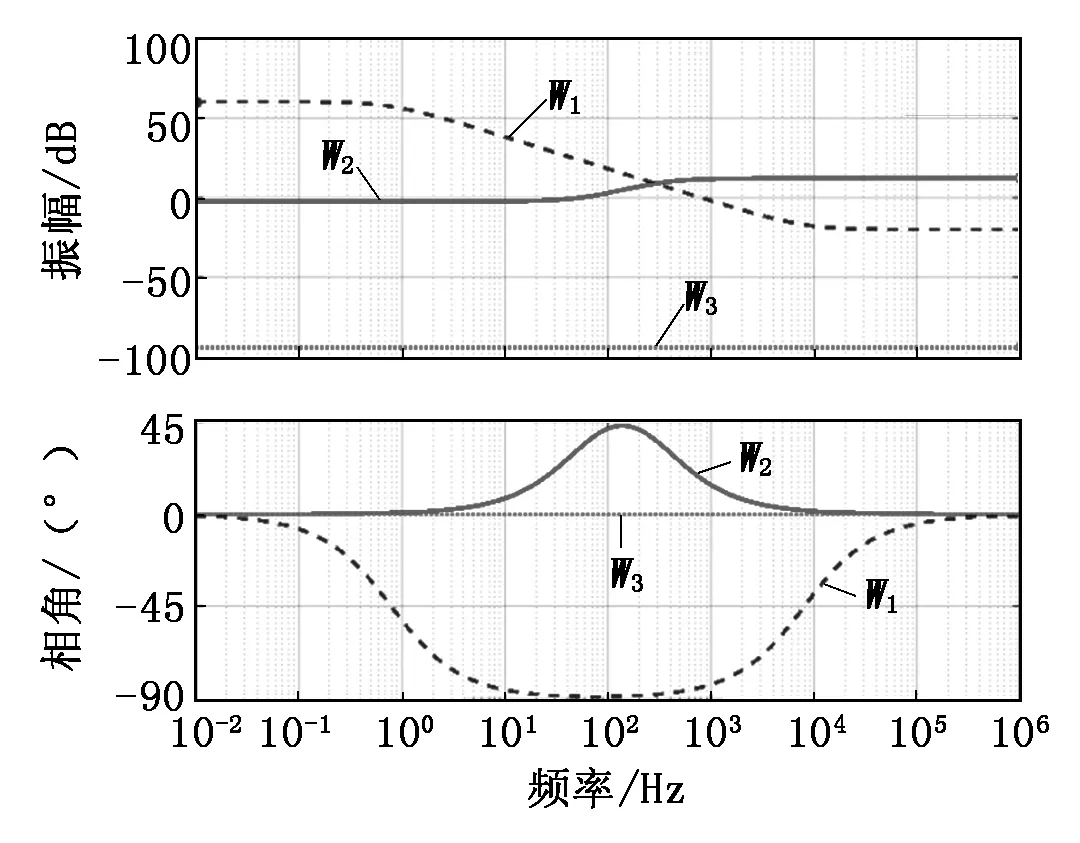
图5 W1、W2和W3的伯德图
最后根据三个加权函数,在MATLAB上求出鲁棒控制器的传递函数,其传递函数的伯德图如图6所示。
4 仿真分析
4.1 分析方法
在MATLAB的Simulink模块中搭建一套含鲁棒控制算法、PID控制算法和开环控制算法的仿真系统,如图7所示。
首先给系统触发一个阶跃单位信号,在示波器上得到相应的阶跃响应曲线,分别来分析各个控制器的上升时间、超调量和调节时间,从而来分析控制器的动态响应性能和稳态整定性能。
其次当被控对象整定到稳态时,再给系统触发一个干扰信号,来分析鲁棒控制器和PID控制器抑制干扰的性能。
4.2 仿真结果
首先在没加干扰信号条件下,给系统触发一个单位阶跃激励信号,得到如图8所示的鲁棒控制算法和PID控制算法的阶跃响应。
由图8可知:在相同情况和条件下,鲁棒控制器在动态上升过程中没有出现明显的过冲,可以迅速地进入稳态过程;而PID控制器却达不到这种效果,说明鲁棒控制算法有良好的动态响应性能和稳态整定性能。
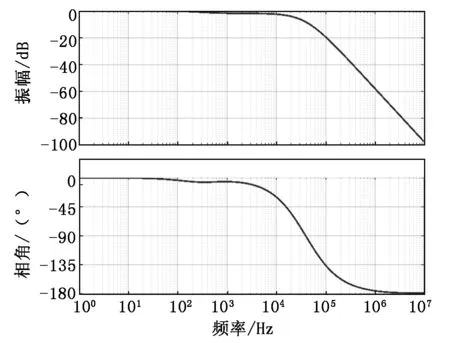
图6 鲁棒控制器的传递函数伯德图
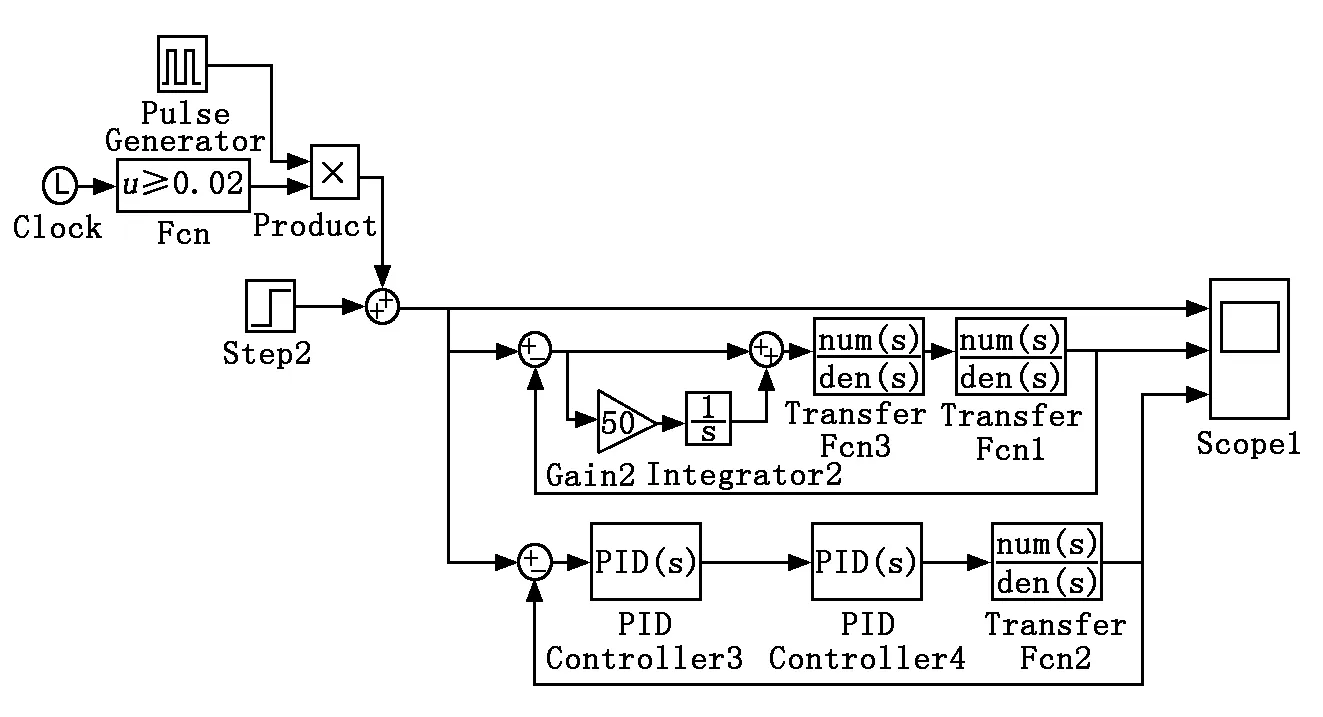
图7 鲁棒控制算法与PID控制算法性能对比仿真系统
然后再给系统触发一个阶跃激励信号,待系统达到稳定后,添加一个干扰信号,最后分别在示波器中得到鲁棒控制器和PID控制器抑制干扰能力的结果,如图9所示。
由图9可知:当遇到扰动时,鲁棒控制算法可以迅速恢复到稳定状态,且没有出现显著的波动,从而验证了所设计的鲁棒控制算法具有良好的抑制外来干扰的能力。
5 结论
通过与PID控制算法仿真对比,验证了鲁棒控制算法较好地改善了被控对象的动态响应品质和稳态抑制干扰的能力。
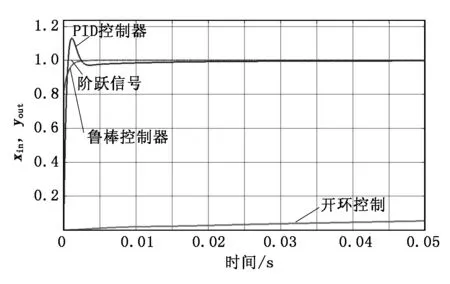
图8 鲁棒控制算法与PID控制算法阶跃响应对比
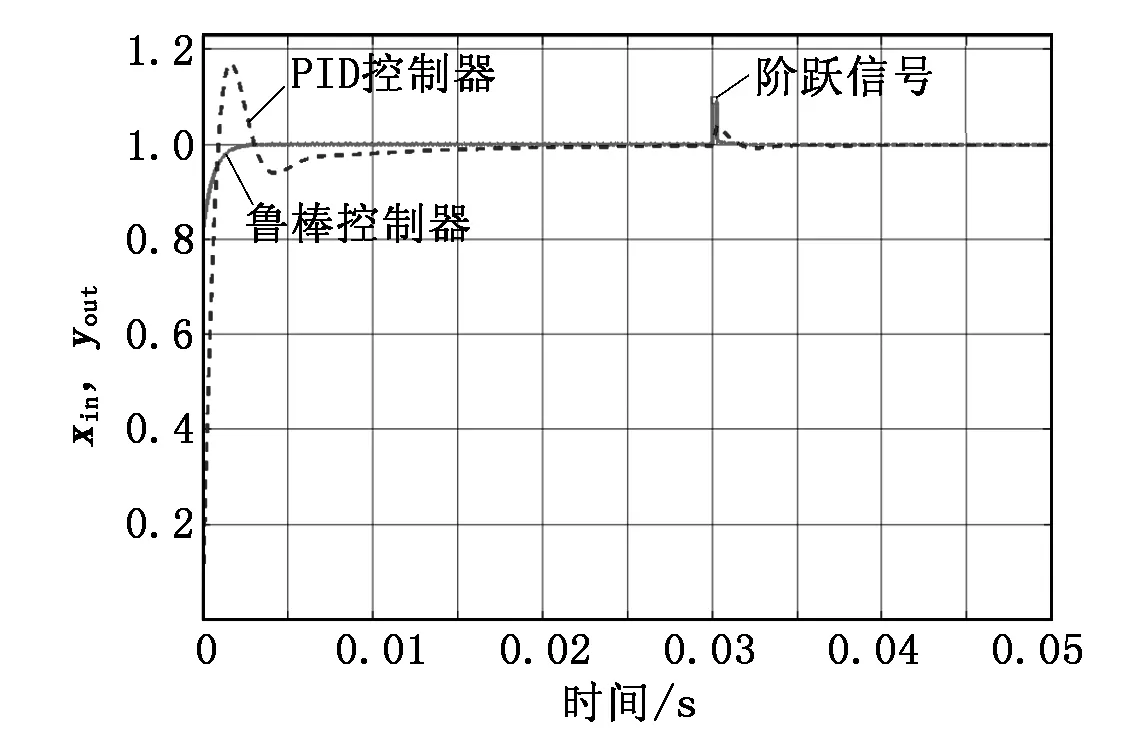
图9 鲁棒控制算法与PID控制算法抑制干扰性能对比
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09
化工自动化及仪表(2020年6期)2020-12-08
河南科技(2020年2期)2020-10-21
微特电机(2020年7期)2020-07-28
微特电机(2020年3期)2020-03-24
制造技术与机床(2019年9期)2019-09-10
自动化学报(2019年6期)2019-07-23
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2016年7期)2016-11-16
山东工业技术(2016年22期)2016-02-02
