
应用于非常规场景巡检的第一视觉5G智能机器人*
2020-08-26 06:26谢小明
自动化与信息工程 2020年4期
谢小明
应用于非常规场景巡检的第一视觉5G智能机器人*
谢小明
(广州市真光中学,广东 广州 510380)
针对危房、危桥、爆炸区等非常规场景下排障、抢救作业的情况,基于移动机器人控制技术、传感器技术和5G Wi-Fi通讯技术设计一种应用于非常规场景巡检的第一视觉5G智能机器人。该机器人代替搜救人员或排障人员进行抢救、排障作业,管理人员通过5G智能机器人第一视觉模块实时获悉现场情况,实现远程控制救援。
巡检;第一视觉;智能机器人;5G
0 引言
国内机器人的相关研究已有20多年的历史,其中移动机器人的研究发展较迅速。移动机器人具有利用传感器感知环境信息和自身状态,在有障碍的环境中完成某些预定任务的功能[1]。目前,社会对智能移动机器人的需求量很大,特别是针对巡检、安防等领域的特种移动机器人的研发是热点。随着政府和社会对安全工作的重视,针对危险环境下的排障、抢救作业,需要有更智能、操控性更好的机器人代替人进行工作。
传统的巡检机器人多采用四轮驱动,此类机器人在狭小空间环境下作业,存在3方面的不足:1)体积较大,在狭小空间不便开展作业;2)移动灵活性不足,转向半径大,削弱了自身的越障能力;3)大都采用2.4 GHz通信频段的通讯系统,无法满足高速数据传输和远程精准性操作。为此,本文设计一种在非常规场景下适应性强、实时同步效果好的第一视觉5G智能机器人。
1 机器人结构
在危房、危桥、爆炸区等非常规场景下作业,需要面对空间狭窄、地面崎岖等问题。第一视觉5G智能机器人由控制系统、三轮全方向驱动载物平台、目标管理系统、5G无线通讯系统和上位机控制系统组成。
1.1 控制系统
控制系统使用NI myRIO嵌入式系统开发平台,通过内嵌Xilinx Zynq芯片,实时应用FPGA、内置Wi-Fi功能,实现远程部署应用;3个连接端口(2个MXP端口和1个MSP端口)负责发送接收来自传感器和电路的信号,以支持三轮全方向驱动载物平台系统,如图1所示。控制系统实时采集超声波传感器、红外传感器、寻迹传感器和摄像头的数据,全方向移动配合3个超声波传感器和2个红外传感器进行路径规划、自动避障和位置校准。
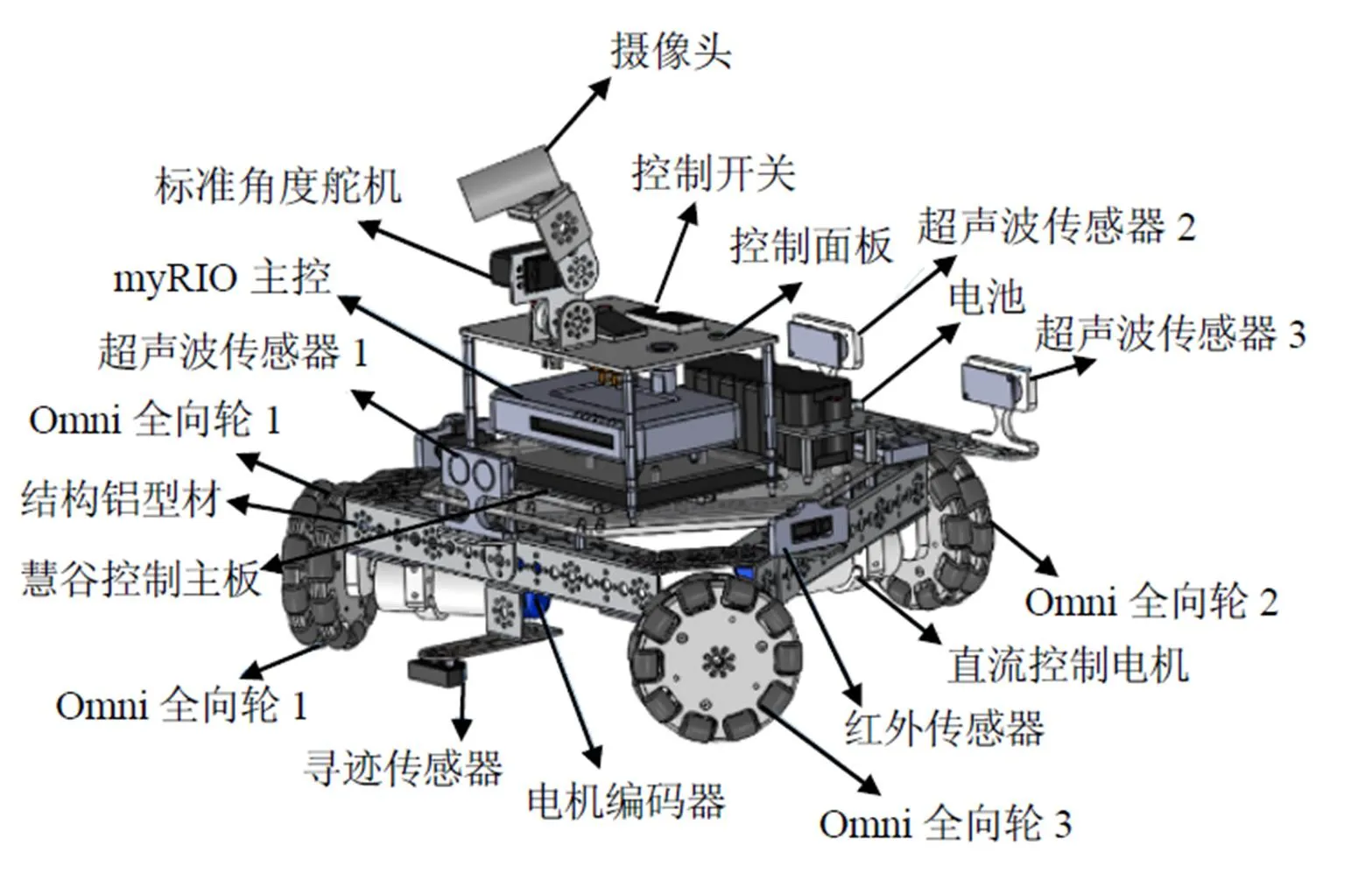
图1 第一视觉5G智能机器人控制系统
1.2 三轮全方向驱动载物平台
因轮式移动机构具有移动效率高的特点[2],本文采用的三轮全方向驱动载物平台,如图2所示。其使用3个同心等距分布的万向轮作为驱动轮;通过控制驱动轮所连直流无刷电机的驱动力矩,实现机器人的全方向移动。三轮全方向驱动载物平台结构简单、体积小且能够全方向移动。如此,第一视觉5G智能机器人在狭小环境下可实现高效、稳定移动。

图2 三轮全方向驱动载物平台
当精确控制三轮全方向驱动载物平台的运动时,首先需知三轮全方向驱动载物平台的位置。三轮全方向驱动载物平台的位置通常采用坐标表示,通过对电机的转速控制实现精确定位。通过计算运动学正向解,将轮子的转速换算得到三轮全方向驱动载物平台在世界坐标系中的位置坐标。
已知电机转速、轮半径和3个轮的位置关系,使用正交分解,将3个速度V,V,V转化为机器人的线速度和角速度;再经过三角换算,得到世界坐标系中三轮全方向驱动载物平台的线速度和角速度;然后各自求积分,可计算得出三轮全方向驱动载物平台在世界坐标系^'、^'下的位置和转向角度,如图3所示。
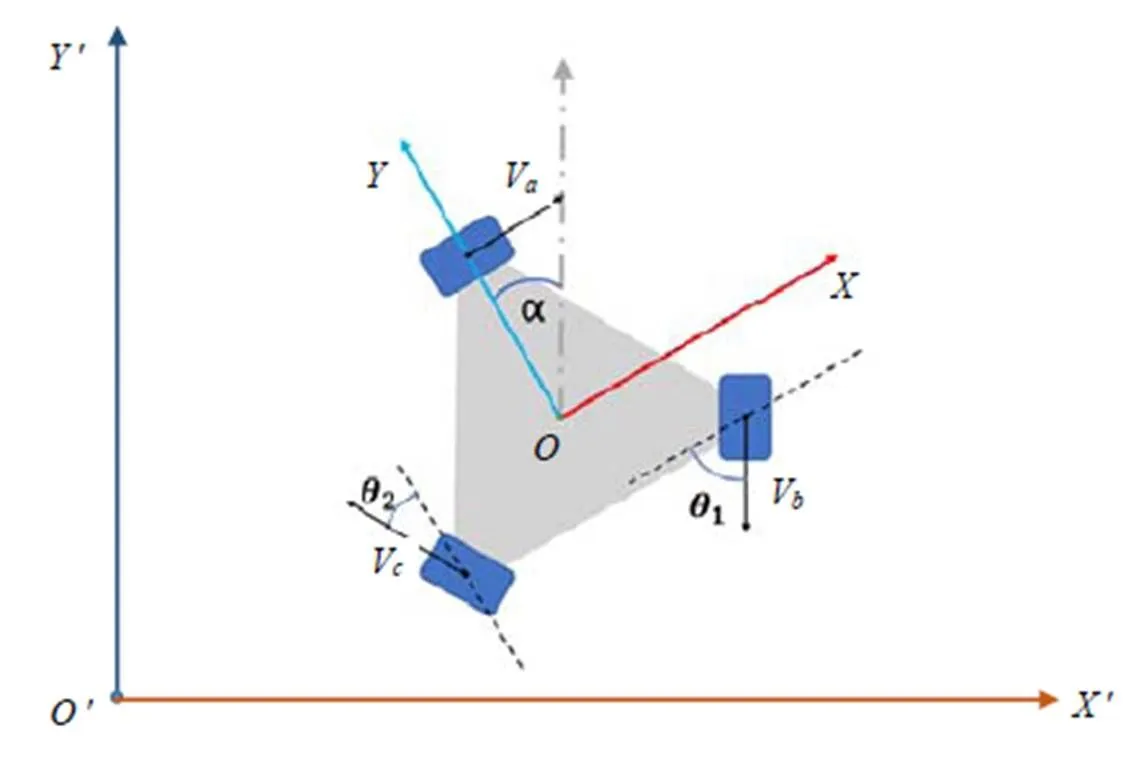
图3 载物平台相对于世界中的位置分解

1.3 目标管理系统
第一视觉5G智能机器人需对现场目标物体和其他物体进行区分。利用目标管理系统的图像自主处理模块,对感兴趣目标进行提取分割,对目标进行理解,并完成相应的视觉任务[3]。利用高清摄像头和非接触传感器自动接收和处理真实物体的图像,通过图像分析获得物体坐标关键性信息。使用Microsoft LifeCam Cinema,配合NI VISION Builder和IMAQ Vision图像处理算法对物体图像进行分析。工作过程如下:1)摄像头采集彩色图像,并对图像进行Color Threshold彩色阈值处理;2)进行粒子处理Remove small objects + Convex Hull;3)通过粒子分析提取物体坐标,实现模拟人的视觉功能。
在非常规场景巡检中,当目标管理系统的图像自主处理模块无法处理时,可以启动目标管理系统的第一视觉模块。现场操作人员使用2.8 mm广角镜的650TVL摄像机和7英寸LCD高清屏幕对场景周围环境进行感知,控制机器人进行排障及抢救作业,如图4所示。
机器人目标管理系统具有智能跟随模块,可以保持与追踪物体的平行,通过FPGA实现对超声波传感器的读取。根据2个超声波传感器距离的差值与平均值,判断当前机器人的状态,通过闭环控制(PID控制)让机器人实现自动调整与追踪。

图4 目标管理系统的第一视觉模块
1.4 5G无线通讯系统
2.4 GHz Wi-Fi信号频宽较窄,家电及无线设备大多使用该频段,无线环境拥挤导致干扰较大,不利于实施排障及抢救作业。5G技术具有吞吐量能力强、频率利用率高、联网设备强、可靠性高、延时性强和符合绿色环保需求的特征[4],在智能巡检中应用前景明朗,其高带宽、低时延的特点适用于实时远程操作。为提高第一视觉5G智能机器人巡检数据传输的实时性,实现远程控制操作的同步性,机器人采用5G无线通讯系统。通过myRIO与X HUB,OMSP-AC硬件上的连接,将myRIO的2.4 GHz通信频段高速转换成5.8 GHz,实现局域网内5G通讯,使操作智能巡检机器人更加流畅,提高操作精准性。
1.5 上位机控制系统
使用LabVIEW编程语言进行上位机控制系统编程,实现电脑与机器人myRIO对超声波传感器、红外传感器、寻迹传感器、摄像头和直流电机编码器等数据的读取显示、图像采集与处理的显示,以及遥控控制机器人的自主运动,如图5所示。

图5 上位机控制系统部分程序框图
2 功能验证
本文采用验证实验对机器人进行功能验证,通过对比采集到的机器人主要模块功能性参数与实际参数,验证机器人的功能和运行状态是否符合设计预期。假设智能机器人到非常规场地进行巡检,通过上位机控制系统启动三轮全方向驱动载物平台,配合目标管理系统的图像自主处理模块和智能跟踪模块,对目标物体进行识别和处理;实验读取图像自主处理、超声波传感器、电机编码、位置PID和速度PID的功能性参数。通过设置障碍,使视觉系统无法自主处理,操作人员启动5G无线通讯系统配合第一视觉模块进行遥控操作,顺利完成远程控制排障和救援;实验读取5G无线通讯系统和第一视角的功能性参数。经过比对功能性参数和实际参数,验证机器人的基本功能和整体运行正常,如图6所示。

图6 电机编码基本功能测试验证
3 结论
本文设计的第一视觉5G智能机器人融合全向移动控制、自动追踪、目标管理等系统,经过功能验证,能解决模拟测试环境下的排障处理,实现精准性、稳定性的设计预期,满足在危房、危桥、爆炸区等场景下,代替搜救人员或排障人员进行抢救作业,同时满足救援管理人员实现远程控制救援的需求。
[1] 张琦.移动机器人的路径规划与定位技术研究[D].哈尔滨:哈尔滨工业大学,2014.
[2] 胡晓达.基于PLC的轮式移动机器人系统设计[J].技术与市场,2018,25(1):142.
[3] 陈龙,辅助视觉中的图像处理关键技术研究[D].西安:西安电子科技大学,2013.
[4] 龚玮,梁福学.5G技术的发展与应用[J].计算机产品与流通,2019(12):122.
First Vision 5G Intelligent Robot for Unconventional Scene Inspection
Xie Xiaoming
(Guangzhou True Light High School, Guangzhou 510380, China)
This paper presents a kind of first vision 5G intelligent robot, designed based on mobile robot control technology, sensor technology and 5G Wi Fi communication technology.In view of the obstacle removal and rescue operations in unconventional scenes such as dangerous buildings, dangerous bridges and explosion areas,the robot takes the place of search and rescue personnel or obstacle removal personnel to rescue and remove obstacles. The management personnel can get real-time information of the scene through the first vision of 5G intelligent robot, so as to realize remote control and rescue.
patrol inspection; first vision; intelligent robot; 5G
TP242.6
A
1674-2605(2020)04-0011-04
10.3969/j.issn.1674-2605.2020.04.011
谢小明,男,1981年生,中学一级,工学学士学位,主要研究方向:中小学人工智能科普教育,中小学信息技术与学科融合。E-mail: mingo.x@qq.com
广州市荔湾区科技计划项目(201804038)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
纺织科学研究(2021年1期)2021-12-03
现代仪器与医疗(2021年1期)2021-06-09
房地产导刊(2020年11期)2020-12-28
电子制作(2019年22期)2020-01-14
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
传媒评论(2019年5期)2019-08-30
