基于超像素分割算法的大田小麦导航路径获取
2020-08-28 15:24焦崇珊宋怀波
江苏农业科学 2020年14期
焦崇珊 宋怀波


摘要:实现复杂场景下导航路径的自动获取,是大田小麦自主作业机器人连续作业的重要环节和基础。通过简单线性迭代聚类算法(simple linear iterative cluster,简称SLIC),在获取麦田裸地超像素区域的基础上,使用Otsu算法实现了裸地区域的自适应分割,并通过数学形态学闭运算、Canny边缘检测、Hough直线检测等操作实现了导航路径的精确获取。为了验证本研究方法的有效性,将计算所得的导航角度与真实角度值间的平均误差及均方差作为评价指标,并从34幅不同遮挡类别图像中随机选取15幅图像进行了测试。结果表明,本研究方法的导航角度平均误差为1.584°,均方差为1.293°。表明将该方法用于田间小麦导航路径的获取是有效的。
关键词:小麦行间导航;SLIC算法;目标分割;导航路径
中图分类号: TP391.41 文献标志码: A
文章编号:1002-1302(2020)14-0255-06
自主导航是田间作业机器人系统的关键技术之一,基于机器视觉的自主导航技术是农业机器人实现田间连续作业的重要发展方向。如何在复杂田间环境下实现作业路径的精确获取,已成为田间作业机器人研究的重点,受到了越来越多的关注[1]。目前,农业机器人导航研究主要包括视觉导航和卫星定位导航(GPS)2种方式[2-3]。关卓怀等基于2R-G-B超红图像,采用综合阈值法进行图像二值化分割,根据图像灰度垂直投影值动态设定感兴趣区域,水平扫描获取作物线拟合关键点,并采用多段三次B样条曲线拟合法提取水稻待收获区域边界线,4种光线环境下15个关键点的平均误差为36.5像素,平均距离误差为45.0 mm,平均相对误差为2.8%[4];王红君等采用多颜色空间分割得到差值图像和分量图像,采用Otsu算法进行最优阈值分割,最后用优化的Hough变换确定导航路线,正确识别率为95%[5];高国琴等选取HSI颜色空间中的H分量进行处理,采用K-means算法分割垄间裸地和绿色植物,再通过数学形态学消除干扰得到完整的道路信息,该方法的最大误差为 6.2 cm,平均误差为3.7 cm,均方误差为4.1 cm[6];孟庆宽等在YCrCg颜色模型的基础上,选取与光照无关的Cg分量进行处理,采用模糊C均值聚类算法分割目标和背景,提出了一种快速作物行检测算法,该方法抗干扰能力较强,在车速为0.6 m/s时最大横向偏差不超过76 mm,平均值为33.1 mm,标准差为20.6 mm[7]。
超像素分割是实现目标精确分割的有效方法。杨丽艳等结合SLIC和模糊聚类算法实现了遥感图像分割,精度为0.775 1,召回率为0.884 1[8];Shi等提出了一种新的分割图形的全球标准——规范化分割方法(normalized cut,N-Cut)[9],这一标准衡量了不同组之间的总差异和总相似;Felzenszwalb等提出了Graph-based方法[10],给出了一种在图表示(graph-based)下图像区域之间边界的定义的判断标准,并使用贪心选择来实现分割,能够将高变化区域很好地聚合为同一区域;Levinshtein等提出了Turbopixel方法[11-14],用于计算图像的密集过分割,与缺少紧凑性约束的算法相比,紧凑性更高;Achanta等提出SLIC超像素分割算法,采用k均值聚类方法来有效生成超像素,提高了分割性能,并且可以直接扩展到超体素生成[3]。在上述超像素分割算法中,SLIC算法处理速度快,并且超像素块能够很好地贴合目标边界,能够获得形状、大小基本相同的超像素块。采用SLIC超像素分割对输入图像进行处理,能够减小算法计算复杂度[15]。
因此,为了实现大田小麦导航路径的精确获取,本研究基于SLIC超像素分割理论,在小麦裸地超像素区域精确提取的基础上,利用Otsu算法得到小麦裸地区域的二值图像,并使用数学形态学、Canny边缘检测进行图像预处理,最后利用Hough直线检测算法实现导航路径的准确提取,以期为大田小麦自主作业机器人的准确导航奠定基础。
1 测试图像与运行环境
为测试算法的有效性和环境适应性,分别采用多种图像获取设备获取了34幅图像作为测试样本。在自然条件下进行路径的获取,主要影响因素为小麦叶片的遮挡,当遮挡范围超过地面的1/2时为严重遮挡,本研究所使用的图像类别见表1,共包含轻微遮挡图像12幅,严重遮挡图像13幅,无遮挡图像9幅;手机获得图像分辨率为2 268×4 032像素,CCD相机获得的图像分辨率为2 592×4 608像素。本研究算法运行于Microsoft Windows 10操作系统,Matlab R2018b与PyCharm 2017.1 x64版本软件,内存8 G,主频2.20 GHz,机械硬盘空间2 T,固态硬盘空间128 G。
2 基于SLIC的大田小麦导航线获取
基于SLIC的导航线获取方法主要包括基于SLIC算法的裸地区域分割、裸地区域的预处理、行间边缘直线检测与导航线提取3个部分。从图1可以看出,首先提取麦田裸地区域,然后对目标区域进行预处理,预处理包括图像的二值化,数学形态学处理和边缘检测,以去除未连通小区域和边缘毛刺等,并得到行间边缘曲线;利用Hough变换进行直线检测得到行间边缘直线,将边缘直线的角平分线作为前进方向的路径。
2.1 基于SLIC算法的麦田裸地区域分割
超像素是指对具有相似特征的相邻像素进行聚类,特征主要包括纹理、颜色、亮度等,然后产生形狀不完全规则和具有一定视觉意义的像素块[13-14],其实质是一种改进的K-means算法。该算法将图像像素在Lab颜色空间3个颜色分量的值和每个像素在直角坐标系下的2维位置坐标组成N(N为图像像素点的总数)个5维特征向量,根据CLELAB颜色空间和xy坐标下的特征向量构造相似度量标准,对相似的像素点聚类生成超像素。SLIC算法能有效抑制“椒盐”噪声的问题,不但可以自主设置生成超像素的个数,而且能够生成形状规则的像素块且具有较好的边界附着性。SLIC算法的具体步骤[3]为:
2.1.1 初始化种子点 首先预设其有N个像素点,SLIC算法运行后生成了大小相同的K个超像素,每个超像素的尺寸大小用N/K来表示。种子点间的距离可以表示为S=[KF(]N/K[KF)]。为了避免影响后续的聚类结果,种子点在邻域内的3×3的窗口内移动,同时计算所有像素点的梯度值,并保证移动到梯度值最小的位置,防止种子点被分配到图像的边缘位置或噪声点位置,并分配标签到每个种子点上。
2.1.2 相似性度量 对每个像素进行搜索,计算像素点与种子点之间的相似程度,包括颜色距离和空间距离,不断迭代直到收敛,关系如公式(1)至公式(3):
式中:[lk ak bk xk yk]代表种子点的5维特征向量;[li ai bi xi yi]表示为待判断像素点的特征向量;k指种子点;i是图像中的搜索像素点;dlab指的是像素点间的颜色相似程度,dxy为图像中邻域内像素点的空间距离;S为种子点的间距大小,m是用来衡量颜色信息与空间信息的相似比重。D代表2像素点的相似度,越相似则D取值越大。SLIC算法在2S×2S之间进行搜索,该操作可使算法加快收敛速度。
在麦田裸地区域分割时,SLIC算法参数大小的设置会直接影响到超像素分割的效果。大田小麦原始图像见图2,可见麦垄的边缘被小麦枝叶遮挡,这会对裸地区域的分割与麦垄边缘的获取产生影响。SLIC算法采用不同超像素点处理后的结果见图3,其中图3-a为选取600个超像素点的结果,图3-b为选取700个超像素点的结果,图3-c为选取800个超像素点的结果,图3-d为选取900个超像素点的结果,图3-e为选取1 000个超像素点的结果,图3-f为选取1 100个超像素点的结果。通过对比发现,当超像素点个数小于800时,分割块过大,目标提取不够精细;当大于800时,分割结果过细,不利于后续显著性目标的提取,因此本研究选用800个超像素点的处理结果进行后续的处理与分析。
2.2 裸地区域预处理方法研究
麦田裸地区域的预处理可以有效去除噪声、平滑区域边缘,是导航线精确提取的重要环节。本研究主要通过数学形态学闭运算及边缘检测方法来进行麦田裸地区域的预处理,处理结果见图4。其中图4-a为利用Otsu算法自适应分割后的结果,可见目标边缘存在毛刺等冗余信息,本研究采用大小为300像素的disk型模板进行数学形态学闭运算的结果如图4-b,可见对未连通的小区域、边缘毛刺等冗杂信息处理效果良好;最后通过Canny算子进行行间边缘曲线的提取结果见图4-c,可见图像预处理后得到的行间边缘信息良好,可为大田小麦导航路径的准确提取奠定基础。
2.3 小麦行间边缘直线检测和导航路径的提取
2.3.1 基于Hough变换的小麦行间边缘直线检测
利用Canny算子得到行间边缘曲线后,本研究通过Hough变换进行直线检测,以得到行间边缘直线。Hough变换是一种检测、定位直线的有效方法,
该方法通过将二值图像变换到Hough参数空间,在参数空间用极值点的检测来完成目标的检测,抗干扰能力强[15]。本研究对图4-c进行Hough直线检测的结果见图5,图中直线是Hough直线检测后的小麦行间的边缘直线,与检测得到的裸地边缘基本一致,可为导航路径的准确檢测奠定基础。
2.3.2 麦田导航路径的获取
若检测到2侧的边缘直线,导航路径为角平分线;若只检测到1侧的边缘直线,导航路径采用检测到的边缘直线的参数;若2侧均未检测到边缘直线,导航路径为图像竖直方向的中间线。图6中的红线是2条蓝色直线的角平分线,即为计算出的前进方向的路径,通过计算得出的θ1为90.94°。
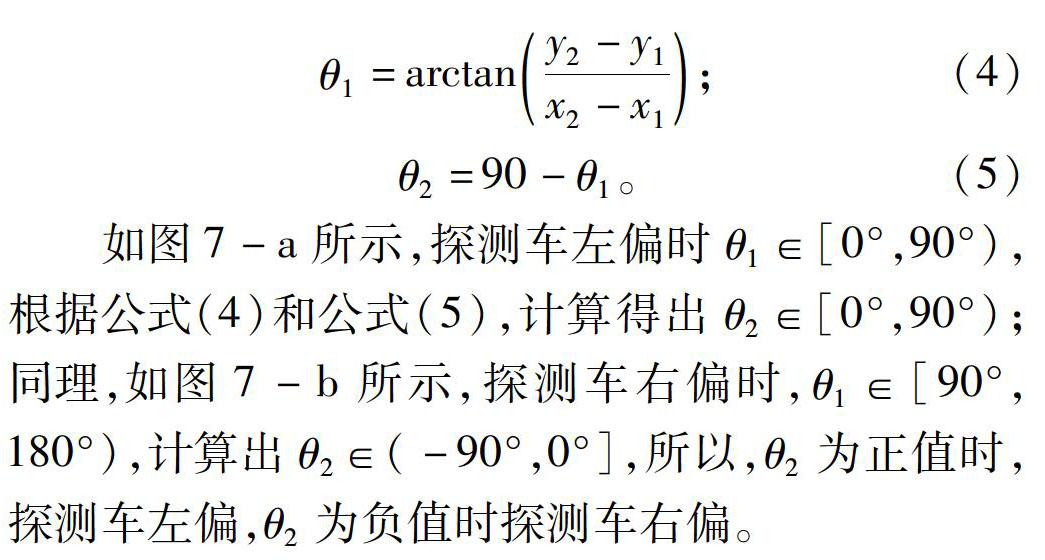
导航参数的分析见图7。θ1是导航路径与x轴的夹角,θ2是导航路径与竖直方向的夹角。当自主作业机器人无需纠正时θ1在90°左右,θ2在0°左右,所以,导航参数选择使用θ2,根据θ2的正负和大小判断作业机器人的偏转方向和偏转角度。
如图7-a所示,探测车左偏时θ1∈[0°,90°),根据公式(4)和公式(5),计算得出θ2∈[0°,90°);同理,如图7-b所示,探测车右偏时,θ1∈[90°,180°),计算出θ2∈(-90°,0°],所以,θ2为正值时,探测车左偏,θ2为负值时探测车右偏。
2.4 评价指标
为测试算法的有效性及适应性,对34幅小麦行间图像进行了测试。为了进一步验证本研究算法的有效性,将θ1的计算值与标准值作比较,评价指标采用θ1的真实值与计算值之差的均方差(RMSE),如公式(6)所示。
式中:n是导航系统测试图像的数量,i表示第i张测试图像,θ1i是手工标注得到的角度,θ[DD(-*2][HT6]^[DD)]1i是导航系统计算得到的角度,X[TX-]是θ1的真实值与计算值之差的平均值。
3 测试结果与分析
3.1 试验结果
在前文所述的运行环境下,用本研究提出的方法处理34幅测试图像。随机取15幅测试结果见表2,角度的标准值通过Visio软件在原图像测得。从表2可以看出,15幅图像测试结果的平均误差值为1.584°,均方差为1.293°,表明本研究方法是有效的。本研究按照影响因素将测试图像分为3类,图像1~5为轻微遮挡时的结果,图像6~10为严重遮挡时的结果,图像11-15为地面无遮挡时的结果。其平均误差及均方差分别为0.870°、0.572°,2.886°、1.358°,0.996°、0.540°,均能达到对路径识别的要求。
3.2 小麦叶片的遮挡对导航路径获取的影响
叶片遮挡是影响大田小麦导航路径获取的主要因素,本研究中的SLIC算法会将部分遮挡区域分割出来,尽可能地实现路径的精确获取,减少自然因素的影响,使环境适应性更高且分割效果更佳,对枝叶的小区域遮挡能够适应并且分割效果良好。当地面被轻微遮挡的分割结果见图8,可见当地面被轻微遮挡时,能够将被遮挡处分割出来。
3类不同遮挡类型图像导航线的获取过程示例见图9,其中图9-a为地面被轻微遮挡时的导航线获取过程,图9-b为地面被严重遮挡时的导航线获取过程,图9-c为地面无遮挡时的导航线获取过程。从图9可以看出,当地面无遮挡或被轻微遮挡时获取的导航路径较准确,当地面被严重遮挡时获取的导航路径较无遮挡情况存在偏差。由试验结果[KG*3]可知,当地面被叶片轻微遮挡时,均方差为
0.572°,能够较准确地提取路径,与无叶片遮挡时的差别较小;当地面被叶片严重遮挡时,均方差为1358°;当地面无遮挡时,角度的计算值与真实值之差的均方差为0.540°,说明并未将遮挡产生的影响完全排除,有叶片遮挡较无遮挡时的均方差增加。可见,随着小麦叶片的生长,叶片逐渐伸展,当裸地区域无法识别时,本方法可能不再适用。
裸地区域无法识别时的导航线获取过程见图10,图10-a为裸地区域无法识别时的原图,图10-b为SLIC分割结果,图10-c为导航线的获取结果,其中蓝线为检测到麦垄的边缘直线,红线为计算得到的导航线,棕色线为麦垄的实际边缘直线,黄线为实际导航线,可见检测到的麦垄边缘直线与实际边缘直线差距较大,导致提取的导航线与实际导航线也存在差别。如何实现此类导航路径的获取尚需深入研究。
4 結论
以大田小麦的行间路径为研究对象,从裸地区域目标分割、裸地区域分割结果预处理和行间边缘直线检测与导航路径的提取3个部分展开以实现对小麦行间导航路径的获取。所取得的主要结论如下:
(1)利用超像素分割算法能够很好地分割出小麦行间的裸地区域,为麦垄边缘的检测与导航路径的提取奠定了良好基础。(2)通过数学形态学闭运算处理使得分割区域更加平滑,更加接近麦垄的实际形状,通过Canny算子可以较为精确地提取出麦垄的边缘。(3)通过Hough变换可以较为精确地检测小麦垄的2条边缘直线,两直线的角平分线即为所需导航线。该方法得到的导航线与实际导航线的导航角度平均误差为1.584°,均方差为1.293°,表明将该方法用于田间小麦导航路径提取是有效的。
参考文献:
[1]赵 洲,朱新华,何 颖,等. 机器人在温室中的应用研究[J]. 农机化研究,2015,37(1):238-241.
[2]杨为民,李天石,贾鸿社. 农业机械机器视觉导航研究[J]. 农业工程学报,2004,20(1):160-165.
[3]Achanta R,Shaji A,Smith K,et al. SLIC superpixels compared to state-of-the-art superpixel methods[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(11):2274-2282.
[4]关卓怀,陈科尹,丁幼春,等. 水稻收获作业视觉导航路径提取方法[J]. 农业机械学报,2020,51(1):19-28.
[5]王红君,陈 慧,岳有军,等. 基于多颜色空间分割的温室环境视觉导航路径信息提取[J]. 江苏农业科学,2017,45(16):202-206.
[6]高国琴,李 明. 基于K-means算法的温室移动机器人导航路径识别[J]. 农业工程学报,2014,30(7):25-33.
[7]孟庆宽,张 漫,仇瑞承,等. 基于改进遗传算法的农机具视觉导航线检测[J]. 农业机械学报,2014,45(10):39-46.
[8]杨丽艳,赵玉娥,黄 亮. 结合SLIC和模糊聚类的遥感图像分割方法[J]. 软件,2019,40(12):66-69.
[9]Shi J,Malik J. Normalized cuts and image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(8):888-905.
[10]Felzenszwalb P F,Huttenlocher D P. Efficient Graph-based image segmentation[J]. International Journal of Computer Vision,2004,59(2):167-181.
[11]Levinshtein A,Stere A,Kutulakos K N,et al. TurboPixels:fast superpixels using geometric flows[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(12):2290-2297.
[12]赵宏伟,何劲松. 基于贝叶斯框架融合深度信息的显著性检测[J]. 光电工程,2018,45(2):8-15.
[13]Ren X,Malik J. Learning a classification model for segmentation[C]//Proceedings of the ninth IEEE international conference on computer vision.Washington D C:IEEE Computer Society,2003:10-17.
[14]Kanungo T,Mount D,Netanyahu N,et al. An efficient k-means clustering algorithm:analysis and implementation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,24(7):881-892.
[15]Hough P. Method and means for recognizing complex patterns:US1771560A[P]. 1962-12-18.
收稿日期:2020-02-02
基金项目:国家重点研发计划(编号:2019YFD1002401)。
作者简介:焦崇珊(1999—),男,山东菏泽人,主要从事数字图像处理研究。E-mail:997224153@qq.com。
通信作者:宋怀波,博士,副教授,主要从事农业智能化检测相关研究。E-mail:songyangfeifei@163.com。