
基于Qt的无人机监视雷达显控终端设计与实现
2020-09-03 02:25陈丽朝
无线互联科技 2020年12期
陈丽朝
(成都中电锦江信息产业有限公司,四川 成都 610000)
雷达(Radiodetectionandranging,Radar)是指无线电探测与测距,即利用无线电技术进行目标探测与跟踪[1],诞生于20世纪30年代,经过初步研究与发展,二战期间正式投入军方使用。由于在战争中的突出表现,人们把它誉为“第二次世界大战的天之骄子”[2]。此后,雷达技术受到世界各国的高度关注,在体制、理论、方法、技术和应用等方面都已得到迅猛的发展。雷达显示与控制终端作为雷达系统不可或缺的重要组成部分,是雷达使用者与雷达系统之间的交互平台[3]。
当下,无人机监视雷达显控终端的信息显示、软件界面和操控性能受到高度重视。借鉴大型雷达显控终端的信息显示及控制模式,用当今计算机、软件设计和雷达数据处理等方面的先进技术成果,充分利用雷达信号处理系统提供的各种目标信息,研发具有领先水平的雷达显控终端具有重要的意义。
1 雷达显控终端的系统设计方案
雷达显控终端的作用是实时显示雷达主机中信号处理板处理后的雷达目标信息、雷达系统状态信息、红外摄像头数据,通过人机交互界面设置雷达工作参数和红外控制信号,通过网口发送至雷达主机,同时将要实施打击的无人机目标参数发送至精确打击系统完成实时打击。软件通过Qt平台实现,设计使用Qt 5.9.0版本,代码编辑使用Qt Creator 4.3.1版本。
1.1 软件功能需求
从显控终端的功能需求进行分析,将显控终端系统大致分为以下几个模块:雷达目标的像素密度(Pixels Per Inch,PPI)显示模块、雷达控制模块、红外摄像模块、精确打击系统模块、BIT显示模块、系统设置和日志模块。主要内容有雷达目标的PPI显示模块;BIT显示;红外摄像视频图像显示;局部放大功能,量程可选;电子地图显示;控制界面显示;状态信息显示;具有手动记录和存储功能,并能够重演;威胁目标及参数和属性列表;威胁目标的声音警报和颜色警报;实现对雷达转速、工作模式、扫描方式、频率、自动增益控制(Automatic Gain Control,AGC)、红外摄像头指向、门限等控制。
1.2 软件系统设计
雷达显控终端的任务是雷达信息的显示以及对雷达系统和相关系统的精确控制。无人机监视雷达显控终端是基于Windows操作系统和Qt平台实现软件开发,并完成人机交互界面、系统通信、相关控制等设计与实现。显控终端软件的总体设计如图1所示。
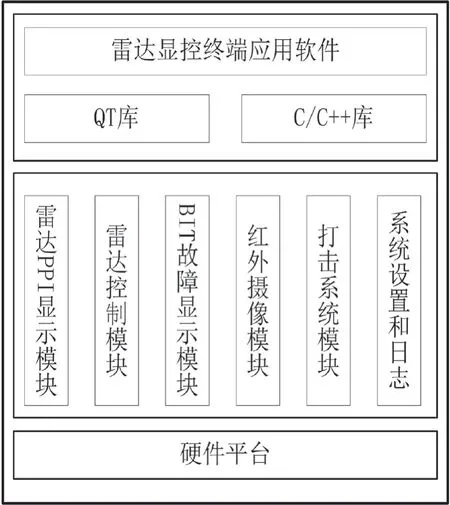
图1 系统设计框架
1.2.1 雷达PPI显示模块
雷达PPI显示是指将目标采用平面二维显示方式,显示目标方位和目标距离。
(1)点航迹显示。雷达传送数据包括点迹数据和航迹数据。点迹数据是指通过雷达检测确定为目标的数据信息,包括目标方位、距离、方位宽、距离宽、信噪比、滤波号、幅度、时间等信息。通过设置点迹颜色、点迹保留圈数、是否画眉毛、最大显示数量等,将所有接收到的点迹信息进行显示。航迹数据是在点迹基础上判定为运动目标,并记录一定运动轨迹的一系列数据信息,包括航迹批号、方位、距离、速度、方位宽、距离宽、高度、仰角、航向、时间等信息,通过设置当前航迹和历史航迹的颜色、航迹显示个数、最大显示航迹数、航迹显示形状、航迹保留圈数等,实现航迹信息的显示,同时显示当前点迹总数和航迹总数。
当收到航迹信息时,系统会弹出提示信息并发出警报声,提醒工作人员准备实施打击,同时显示产生航迹列表,显示航迹的具体信息。
(2)扫描线等辅助信息。实时接收当前雷达天线扫描方位,并通过扇形扫描线显示当前雷达天线扫描方位。雷达作用距离小于10 km,需要显示相应刻度线,并可以设置量程,包含2 km,4 km,6 km,8 km和10 km。同时,显示当前雷达天线扫描速度、时间、显示的中心坐标、鼠标所指的方位和距离等。
(3)电子地图显示。背景需要实时显示电子地图,主要包括街道和地点、主要轮廓等,并可以设置透明度。
(4)记录与回放功能。主要是实现手动记录和存储功能,并能够重演。如果当前软件显示部分由于发现目标或者其他原因需要记录时,可以通过记录功能添加记录,并可随时重演记录内容。
1.2.2 雷达控制模块
雷达控制主要包括参数控制、门限控制和扇区控制等,实现对雷达系统的实时控制和实时监控。
(1)参数控制。包括对雷达的运转速度、扫描方式、工作模式、频率、AGC等的控制。运转速度有停转、每分钟15转、每分钟20转、每分钟30转等方式;扫描方式有环扫和扇扫,扇扫时还需要控制起始方位和终止方位;工作分为调频连续波模式、PD模式、寂静模式等;频率和AGC分别控制雷达发射频率和雷达自动增益控制。
(2)门限控制。主要是对雷达检测目标的阈值的控制,相对来说,门限越低越容易发现目标,但同时杂波也可以越多。主要包括多普勒处理和超杂波处理,包括总共8个相应门限值的控制。
(3)扇区控制。主要是实现雷达对不同方位使用不同工作模式。比如在工作人员所在方位采用寂静模式,以免雷达发射电磁波对身体造成伤害;如果在某个区域想重点检测,可以设置该区域特定的工作模式、相应AGC等。可以划分多个扇区,最多发送10个扇区,对每个扇区都可以设置工作模式、AGC等。
1.2.3 BIT显示模块
BIT显示模块主要是针对整个雷达系统中每个系统的工作状态的监控。主要分为天线系统、接收系统、信号系统、频综模块、伺服系统、红外系统和终端系统的故障和状态信息。
终端软件界面需要实时显示各个系统的工作状态,如果出现故障会进行报警显示,并可以查看具体故障内容,信号系统会实时给终端系统发送故障信息。
1.2.4 红外摄像模块
无人机监视雷达的主要目的是发现周边敌方无人机或者恶意低、小、慢目标,并对威胁目标实现打击,以达到秘密信息不被发现的目的。一般无人机飞行较低,可以通过高清红外摄像观察目标,通过雷达发现目标后根据目标方位调整红外摄像的指向,实时观察目标的情况。终端主要完成视频图像的显示、云台控制、摄像头控制等:
(1)视频图像显示。红外系统会实时向终端系统发送视频数据,终端软件需要对接收到的视频流数据进行解析并显示。(2)云台控制。主要是实现红外摄像头的指向控制,可以控制云台水平方向顺时针和逆时针转动,俯仰方向的俯仰运动,还可以通过定位控制、自动获取控制和手动跟踪控制。(3)摄像头控制。主要包括对摄像头的变位、聚集、光圈的控制和灯光的控制。
1.2.5 打击系统模块
精确打击系统主要是针对发现的无人机或其他威胁目标实施打击,以达到阻止其对我方造成进一步影响。打击系统模块主要是对精确打击系统的控制,包括信号源开关、干扰信号、转台控制、打击控制等。干扰信号包括GPS信号、WiFi信号、遥控信号等,转台控制主要是对转台水平方向上的控制。通过打击控制,可以实现在指定方位发射干扰信号进行打击。
1.2.6 系统设置和日志
系统设置和日志主要是对系统进行相应的设置以及操作记录、点航迹信息保存等。
(1)系统设置,包括对终端各个部分的设置。常规设置包括是否显示刻度线、刻度线显示方式、是否显示航迹游标、是否显示圈外目标、天线显示方式等;点迹设置包括点迹保留圈数、是否画眉毛、点迹颜色、最大显示数量等;航迹设置包括连续显示个数、显示形状、当前航迹颜色、历史航迹颜色、最大显示数量、保留圈数等;BIT设置包括警报颜色、正常颜色、故障提示方式等;扇区设置包括画扇区颜色、线条粗细、扇区上限个数等。系统还可以设置传输IP和端口,但是需要输入管理员密码,以防止随意更改导致数据传输故障。
(2)日志,包括操作记录、点航迹信息保存等。系统保存所有操作记录,包括具体设置的数值。对所有接收到的点迹和航迹数据信息进行保存,可以显示当前接收到的数据信息,以文件的形式保存所有接收的数据,以便进一步查看。
2 雷达显控终端的实现
系统参数设置、门限设置、扇区设置、打击系统、系统设置等通过菜单打开实现。无人机监视雷达显控终端软件完成后,通过网口与各个系统进行连接,并进行系统联调。经过实验验证,终端软件可以完成所有需求的功能,可以正确接收数据并进行显示,正确控制雷达系统及相关系统,完成系统与雷达系统其他各部分的协同工作。主界面包含雷达PPI显示、BIT显示、航迹列表、红外显示等,如图2所示。
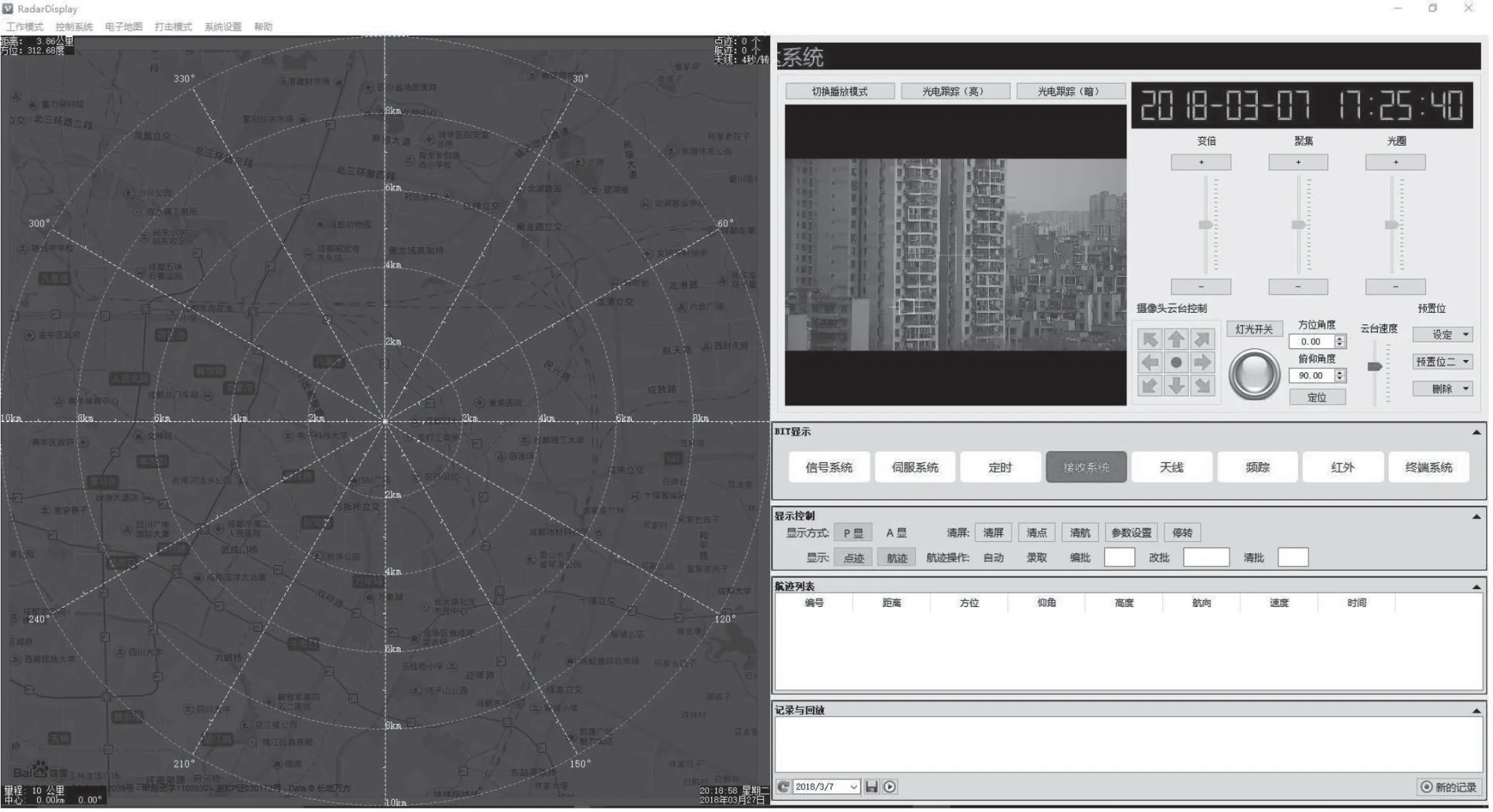
图2 软件主界面
3 结语
文章设计实现了基于Qt平台的雷达显示与控制终端,系统具有性能高、功能强大的特点。主要设计工作内容及系统功能如下:(1)经过分析比较,选择Qt平台作为无人机监视雷达显控终端软件的开发平台,通过Qt的系统架构、图导引擎以及信号与插槽机制等关键技术完成无人机监视雷达显控终端软件的开发。(2)根据无人机监视雷达显控终端的功能需求,设计并实现了显控终端软件。本文实现的雷达系统较大,需研发周期也较长,由于时间限制,对系统进行了初步设计与实现,存在一些不足之处,文章实现的无人机监视雷达显控终端功能还需进一步完善,后期还需对电子地图等功能进行完善以及相关数据处理,实现目标航迹跟踪等功能。
猜你喜欢
南北桥(2022年2期)2022-05-31
青年歌声(2019年12期)2019-12-17
电脑知识与技术·经验技巧(2017年9期)2018-02-24
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
西南交通大学学报(2016年4期)2016-06-15
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
计算机技术与发展(2016年10期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
