
基于多步神经网络观测器的扑翼飞行器缓变故障检测
2020-09-04 10:01王思鹏杜昌平叶志贤宋广华
计算机应用 2020年8期
王思鹏,杜昌平,叶志贤,宋广华,郑 耀
(浙江大学航空航天学院,杭州310027)
0 引言
随着社会的不断发展,无人机在军事、农业等各个领域的作用日益凸显,特别是能量利用效率高、隐蔽性强的扑翼飞行器(Flapping Wing Micro Aerial Vehicle,FWMAV)近年来受到了越来越多的关注[1-5]。与有人机不同,为了保证续航性与足够的有效载荷,无人机大部分采用无冗余系统或者低冗余度系统。目前无人机主要采用惯性/卫星组合的松组合导航方式。在飞控系统的姿态解算与飞行控制算法中,陀螺仪、加速度计等传感器测量值作为观测量,会对状态量的估计产生直接影响。在缓变故障产生的初期,由于故障变化幅值较小,算法所估计出的残差值常小于所设定的门限值,难以引起故障检测算法的响应,导致状态量对故障信号产生跟随,逐渐偏离真实的状态。待到故障检测算法检测到故障时,算法所估计的状态量已经与真实值之间产生了较大的偏差,导致飞行失稳甚至坠机。此外,由于载荷与成本的限制,FWMAV 一般采用低精度的微机电系统(Micro-Electro-Mechanical System,MEMS)传感器,且受其飞行过程中扑动运动的影响,容易出现缓变故障,进而对缓变故障的检测方法提出了更高的要求。
文献[6]中设计了一种神经网络观测器,用于观测飞行器姿态角等状态量,同时能够得到故障类型的信息;这种方法对于突变故障效果较好,但是难以及时检测出缓变故障。文献[7]中针对于水下设备设计了开环观测器,并将预测残差与实际残差进行综合评价。文献[8-9]中采用支持向量机的方法进行故障检测,有效提高了故障检测精度;但是支持向量机计算量较大,对机载处理器要求较高。文献[10-11]中利用小波变换提取传感器输出向量的奇异点,从而检测出故障发生的准确时刻,但是小波基选取的优劣对检测性能影响很大。文献[12-14]中通过搭建神经网络模型进行传感器故障检测,这些方法对于突变故障检测效果良好,但是对于缓变故障的检测效果欠佳。
针对于以上几种故障检测方法在应用于缓变故障检测时存在的问题,本文提出一种基于神经网络观测器的FWMAV传感器缓变故障检测方法。该方法构建了一个多步预测的观测器模型,并分析了其多步观测器窗口宽度对检测结果的影响;同时提出了一种自适应阈值策略,通过残差χ2检测算法辅助进行观测器残差值的故障检测。分析结果表明,和传统观测器相比,本文所提出的算法能够快速准确地检测出缓变故障。
1 FWMAV缓变故障检测方法
1.1 观测器结构设计
FWMAV 是一个典型的非线性系统,难以对其进行精确的建模观测。而神经网络观测器具有良好的自适应能力,在已知输入与输出数据的情况下,能够通过训练充分逼近飞行器的非线性模型。本文设计的网络观测器在系统中的结构如图1所示。
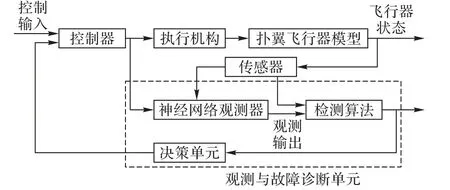
图1 FWMAV系统结构及观测与故障诊断单元Fig. 1 System structure of FWMAV and units of observation and fault diagnosis

在观测器训练过程中,将式(1)右侧作为观测器输入量,将等式左侧作为观测器输出量,进行非线性拟合。在工作状态下,该观测器模型可以通过当前时刻状态的控制器输入量与状态量来预测下一时刻待检测传感器的输出量,将预测值与该传感器的真实输出值进行比较,计算真实值与预测值之间的残差并根据所设定的阈值判断传感器是否正常工作。
传统神经网络观测器使用前一时刻状态量的输入值来预测当前时刻的传感器输出值。这种观测器结构预测精度较高、计算量小,对于传感器突变故障和卡死故障有较好的检测性能;但是对于缓变故障,尤其是变化率比较小的缓变故障来说难以满足要求。设传感器在k 时刻开始出现缓变故障,在传统观测器中,取k - 1 时刻的状态量进行观测,残差rk+1=当残差没有达到检测阈值时,故障就难以被检测出来。若考虑采用k - N 时刻的观测量作为观测器预测的先验值,则可进行N步时间窗的状态预测。为此,本文提出一种多步观测器预测模型。设所诊断的目标状态量为xi,则k -N + 1时刻:

其中:
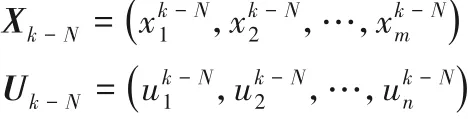
k - N + 2 时刻则使用k - N + 1 时刻xi的预测值代替真实值进行状态预测:

其中:

如此迭代,始终使用当前时刻的状态预测值x^ i 代替真实值xi作为下一时刻的状态量输入值。最终k 时刻的观测器输出值为:

其中:
这样就可以保证,在k + N - 1 时刻之前,观测器的输出值不会受到缓变故障的污染。当N的取值适当时,在k + m时刻,缓变误差已经积累得足够大,残差|达到所设定的检测阈值,即可及时检测出存在的缓变故障。
1.2 自适应阈值策略与算法流程
针对FWMAV 的数据特性,选择残差χ2检测法进行阈值的选取[15-16]。FWMAV的非线性状态空间为:

进行线性化之后,得到的扩展卡尔曼滤波(Extended Kalman Filter,EKF)状态空间为:

卡尔曼滤波(Kalman Filter,KF)中,将残差定义为测量值与观测量之间的差值:

当卡尔曼滤波器正常工作时,残差值服从零均值的高斯分布。残差值的协方差为:

则故障检测函数为:

由于 δk服从高斯分布,则 λk服从自由度为n 的 χ2分布(n为状态量数量)。当传感器出现故障时,λk的χ2分布特性就会发生改变,从而检测出缓变故障的发生。故障检测的策略为:

其中,阈值TD根据所容忍的虚警率进行选取。设所容忍的虚警率为α,则

由于神经网络观测器的观测值存在误差,因此自适应阈值的选取不仅仅与EKF 残差有关,也与神经网络观测器的观测误差有关。将自适应阈值调整为:

其中:Ek为神经网络观测器观测值与传感器输出值的残差;a与b为加权系数,根据实际观测器与EKF 的精度进行选取(文中提出的多步观测器模型与EKF 权重相同,即a和b均取1)。当观测器残差增大时,阈值取值增大,从而抑制噪声对虚警率的影响。
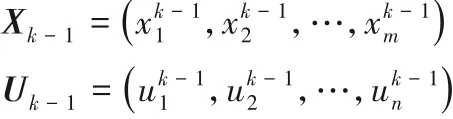
神经网络故障观测器的算法流程如图2 所示。算法流程包括阈值选取、数据预处理、目标传感器输出值预测、故障检测、故障隔离与信号重构等步骤。
图2 多步神经网络观测器算法流程Fig. 2 Algorithm flow of multistep neural network observer
2 算法验证
2.1 多步观测器网络
本节以全球定位系统(Global Positioning System,GPS)高度为例,进行观测器网络的搭建与离线训练。分析FWMAV的非线性模型可知,飞行器k+ 1时刻GPS 高度的预测值h^k+1与k时刻的GPS 高度值hk、地向速度vd有关,同时也会受到飞行器俯仰角θ、油门P以及平尾偏转角度α的影响。因此,建立的传统神经网络观测器模型为:

对于观测器窗口宽度的选择而言,窗口宽度越小,观测器的预测精度越高,但同时能够检测到的缓变故障增益范围越小;反之,窗口宽度越大,观测器精度越低,但是能够检测到增益更小的缓变故障。因此模型窗口宽度的选取需要根据实际数据的情况进行选取与调整。在搭建模型时,选取窗口宽度N=1~15,并在之后的测试环节进行分析比较,从而选取最优的窗口宽度。
多步观测器的反向传播(Back Propagation,BP)神经网络结构搭建的网络如图3所示。其中Ck(k= 1,2,…,N- 1)为k时刻除GPS高度外其他观测器输入量的状态值。对于每个输入,采用“输入层+融合层+隐层+输出层”的四层BP神经网络。每一步GPS高度值预测之后,都将高度预测值输出,用于观测器模型的残差计算。这样,对于图3 中的每一个GPS 预测值,均有GPS 真实值进行比较与损失值计算。因此,多步神经网络可以分为多个四层神经网络,从而防止多层神经网络参数过多导致过拟合等问题。
神经网络采用FWMAV 飞行过程中真实的飞行数据进行训练。飞行数据为FWMAV 团队于浙江大学玉泉校区田径场试飞所采集的FWMAV 真实飞行数据。FWMAV 的飞行轨迹与高度变化分别如图4、5所示。
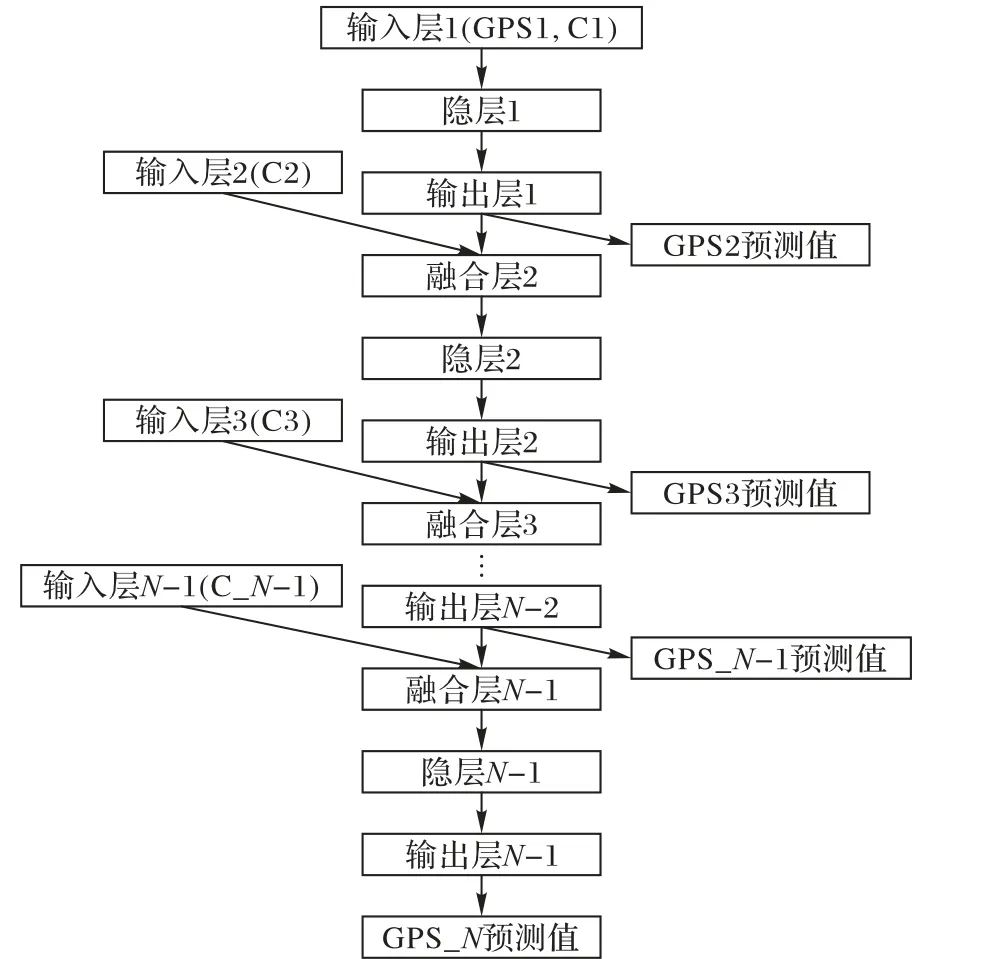
图3 多步观测器神经网络结构Fig. 3 Neural network structure of multistep observer
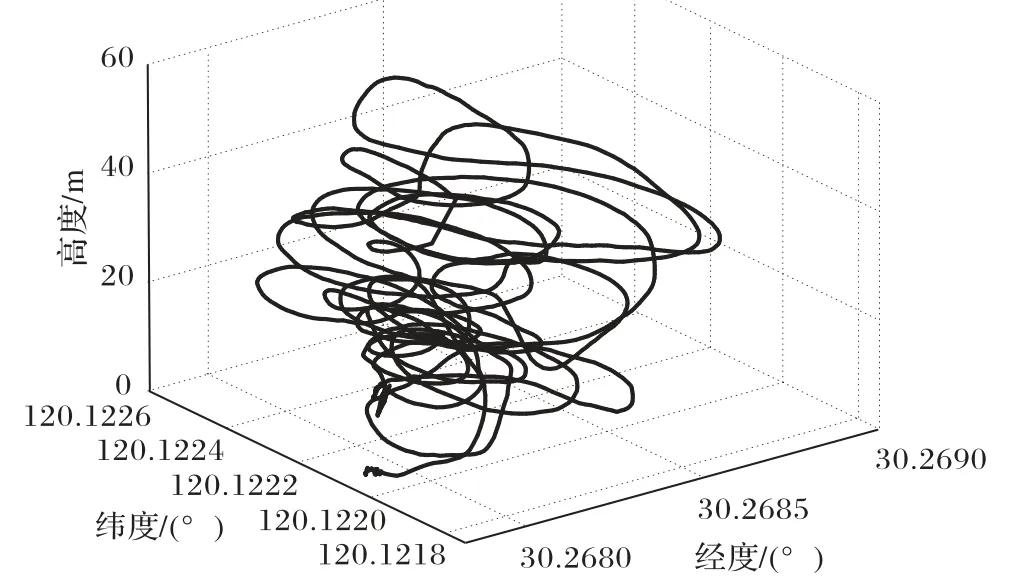
图4 FWMAV飞行轨迹Fig. 4 Flight trajectory of FWMAV
以5 步观测器预测模型为例,隐层采用ReLU(Rectified Liner Unit)激活函数,输出层采用linear 线性激活函数,避免出现梯度爆炸与梯度消失的问题。根据经验公式与训练效果,每个隐层选取10 个神经元。为提高学习速率,设置初始学习率(learning rate)lr= 0.001,并且每进行100 轮学习,学习率下降为上一阶段学习率的0.1。通过分析可知,对于多步预测来说,每一步预测的误差都会对之后的预测产生误差积累,因此对各输出值误差赋予权重,即前期预测误差的权重大于后期预测误差,从而抑制前期预测误差对后续预测的影响。本文算法中选择的误差权重为:


同时设置当连续10 轮学习的损失值不下降的情况下停止训练,以提高训练的效率,避免过拟合。
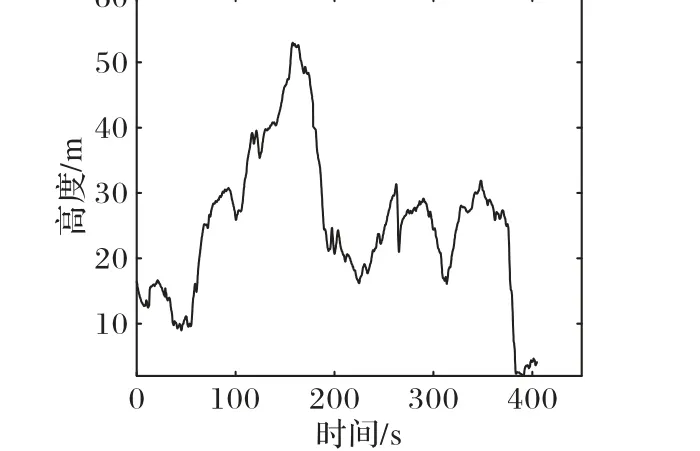
图5 FWMAV的GPS高度变化曲线Fig. 5 GPS height curve of FWMAV
取上述数据中的70%用于模型训练,30%用于模型测试。训练的损失值下降曲线如图6所示,可以看出:损失值在前30轮训练中下降较快,30 轮之后呈缓慢下降趋势,逐渐收敛,并最终在第294 轮达到结束训练条件。测试集的损失值为1.805× 10-3,能够达到模型训练的要求。

图6 观测器神经网络训练损失曲线Fig. 6 Training loss curve of observer neural network
2.2 结果分析
本节在FWMAV 实际飞行实验数据基础上注入如表1 所示的缓变故障进行测试和分析。其中:模式一表示传统神经网络观测器,模式二表示多步神经网络观测器。为了测试多步神经网络观测器的观测性能,设置了不同的故障变化率与观测器窗口宽度。
由于涉及的观测器窗口宽度与缓变故障变化率较多,因此不失一般性,以缓变斜率0.1 m/s、预测窗口宽度10 为例进行详细说明。为了提高不同算法之间性能比较的精确性,在本节中以数据采样步数来描述数据。GPS 采样频率为5 Hz,因此上述100 s 注入故障,在本节中即为第500 步数据注入故障。算法计算结果如图7 所示,其中,实线为观测器预测值与传感器测量值的残差变化曲线,虚线为自适应阈值变化曲线。

表1 注入故障类型Tab. 1 Input fault types
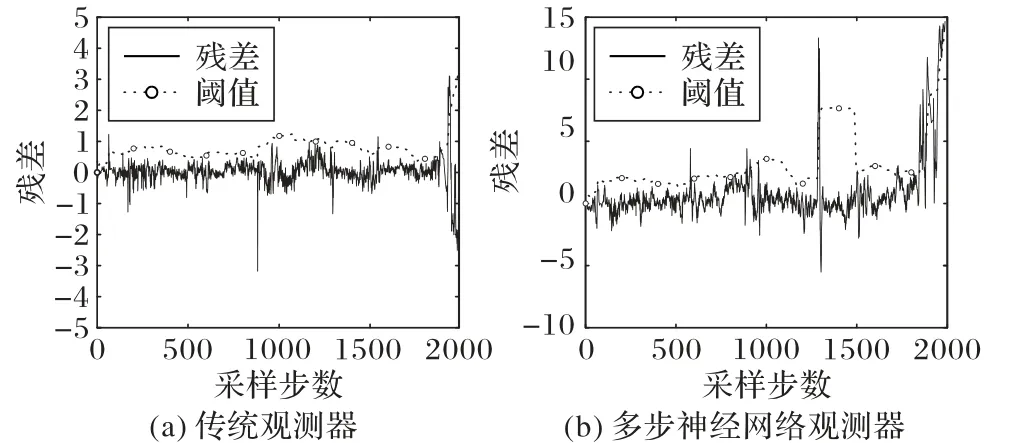
图7 传统观测器与多步神经网络观测器的残差曲线Fig. 7 Residual curves of traditional observer and multistep neural network observer
通过图7(a)可以看出,500 步产生缓变故障之后,残差虽然由零均值噪声变为带零偏噪声,但是噪声波动变化很小,在缓变故障的后期,残差也只是在1 左右波动,即传统神经网络观测器易于对缓变故障形成跟随。由图7(a)可见,在阈值自适应时,传统神经网络观测器在第883步才检测出故障。
而对于图7(b)所示的多步观测器残差曲线,在500 步注入故障之前,观测器的残差符合零均值噪声特性。当500 步开始注入数据之后,初始阶段,由于缓变故障幅度较小,观测器残差值产生小幅波动,数据噪声增大。随着注入的故障逐渐增大,残差值也不断上升。对于自适应阈值来说,对残差数据有一定的跟随效果,故障发生之后,阈值会随着残差的波动而波动;但是阈值的跟随具有一定的延迟性,因此对故障检测的快速性影响不大。多步神经网络观测器在第580 步即检测出了缓变故障。
通过比较可以看出,与传统神经网络观测器相比,本文提出的多步神经网络观测器的性能大幅提升。
对于不同的传感器输出数据类型,本文提出的观测器具有不同的预测性能。因此,对于不同的缓变故障变化率,以下将测试不同的观测器观测窗口宽度,以寻找针对FWMAV 最优的观测器模型。不同故障变化率与不同观测器窗口宽度下,缓变故障的检出点如图8所示。
从图8(a)~(c)可以看出,当缓变故障变化率小于0.3 m/s时,故障检测难度较大,因此在观测器产生一定噪声的情况下,缓变故障的检出点也产生较大的波动;但是相较于传统观测器,本文提出的观测器性能仍有较大的提升。随着缓变故障变化率增大,观测器的性能虽仍有波动,但基本趋于平稳。图8(h)~(j)中,当缓变故障变化率大于0.8 m/s 时,观测窗口宽度在9 步以上的观测器能够在10 步以内观测到缓变故障。各个窗口宽度下,不同缓变故障变化率的平均检出点如表2所示。在本次的观测器设计中,传统神经网络观测器可视为多步神经网络观测器在窗口宽度为1 时的特殊情况,因此将表格合并,即表2中窗口宽度为1时即为传统神经网络观测器的性能。通过表2可以看出,传统的观测器平均在第634步检测出缓变故障,检测步数达到134 步,故障检测率为33.4%。随着观测器窗口宽度增加,故障检测步数逐渐减少,故障检测率逐渐上升,由于观测噪声的影响,检测步数最终在520 步左右产生波动。综合比较可以得出,预测窗口宽度为12 时观测器性能达到最佳,当在第500 步注入故障时,平均在第516 步检测出缓变故障,故障检测率达到65.5%。与基于传统神经网络观测器的故障检测算法相比,本文算法的故障检测速度提高了737.5%,故障检测率提高了96.1%。
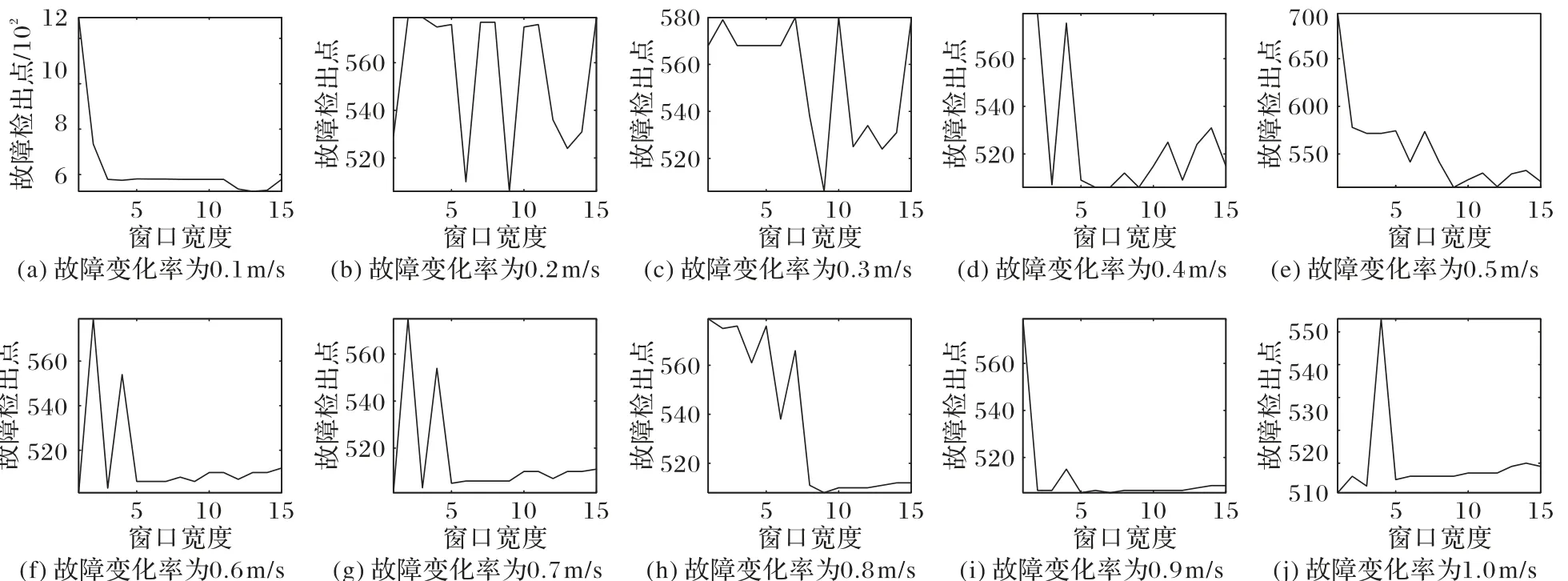
图8 不同故障变化率下多步神经网络观测器性能曲线Fig.8 Curves of multistep neural network observer performance with different fault change rates
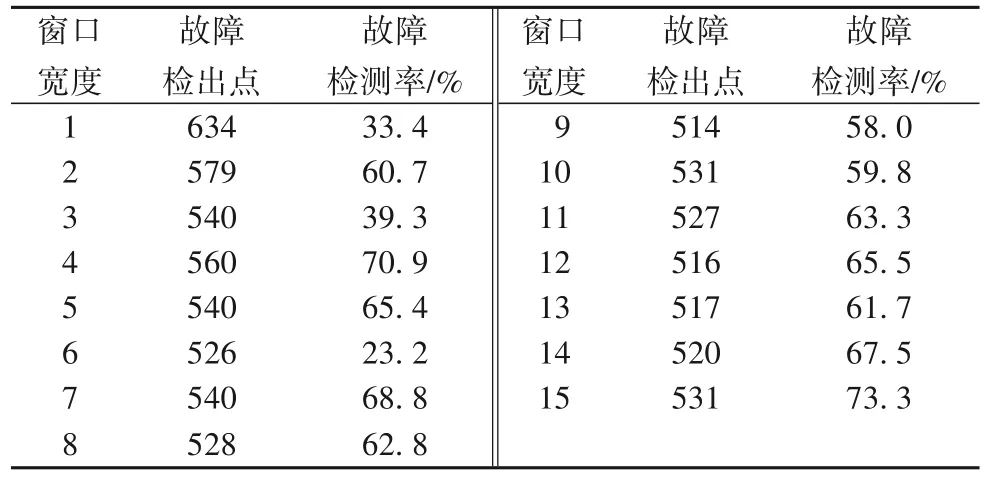
表2 不同窗口宽度下平均故障检出点与故障检测率Tab. 2 Average fault detection points and fault detection rates of different window widths
3 结语
本文提出了一种基于多步神经网络观测器的仿鸟扑翼飞行器的传感器缓变故障检测方法。在传统神经网络观测器难以适应扑翼飞行器大波动的传感器输出信号的情况下,该方法通过多步数据预测神经网络观测器来解决缓变故障检测问题。依据真实飞行实验数据,本文提出的多步观测器能够及时检测出缓变故障,性能优于传统的神经网络观测器。此外,本文测试了在不同的缓变故障变化率与不同的观测器时间窗宽度下,观测器模型检测缓变故障的性能,并对最佳的观测器时间窗宽度进行了测试与分析。结果表明,本文模型能够及时准确地对多种变化率的缓变故障进行检测和隔离,保证了扑翼飞行器飞行过程中的稳定性与可靠性。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
成都信息工程大学学报(2022年2期)2022-06-14
北京大学学报(自然科学版)(2022年1期)2022-02-21
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
北京航空航天大学学报(2019年9期)2019-10-26
人生十六七(2015年5期)2015-02-28
销售与市场·管理版(2009年21期)2009-09-03
