基于图像处理的声相云图评价方法研究
2020-09-08 08:44郑慧峰朱勤丰
计量学报 2020年8期
张 沫, 郑慧峰, 朱勤丰
(中国计量大学 计量测试工程学院, 浙江 杭州 310018)
1 引 言
噪声是一类引起人们烦躁或音量过强而危害人体健康的声音。由于噪声的危害巨大,目前主要是采用声源定位方法进行噪声源识别定位,然后采取针对性手段进行降噪[1]。基于传声器阵列的声阵列技术是应用最为广泛的噪声源定位技术[2]。
1996年,Silverman和Brandstein率先使用了麦克风阵列对声源实现定位[3];Asano F等利用麦克风所组成的大型阵列定位了波音777在跑道上滑行时发出的噪声点,实现了运动物体的噪声实时监测和分析[4];李加庆等利用传声器阵列研制了声场可视化系统,实现了声信号的采集和处理,以及定位声信号的来源[5]。上述几种方法虽然都能够实现声源定位,但不能直观显示声场分布与真实世界物体的空间映射。在声阵列技术的基础上,声相仪(声学照相机)通过结合数码相机技术以云图的方式实现了声源定位,同时显示真实场景中的声源。Seok-Hyung Bae等发明的手持式声学照相机,使声音形成可视化的色彩轮廓[6]。
为了对基于传声器阵列的声源定位系统作进一步研究,Oerlemans S和Sijtsma P研究了线性不相干单极子声源对声源定位系统绝对声压级的影响[7];Barsikow B等使用传声器分别构成水平线性、垂直线性、十字和X形等多种阵列,对比了各种形状阵列下噪声源的识别结果,同时以分析频率段的不同对传声器间距进行了相应调整,达到了最佳分析效果[8];而目前对传声器的校准方法是采用标准活塞式声源对每个传声器进行幅值校准[9]。
上述的几种方法仅仅是从声源定位系统的声学特性和传声器及其阵列方面对声源定位系统开展了相关研究,对于声源定位系统而言,客观评价声源定位结果的准确与否才具有真正的实际意义。《声源识别定位系统(波束形成法)校准规范》[10]初步为声源定位系统的定量评价提供了技术标准,但是只适用于基于波束形成算法的声源定位系统。声相仪作为声源定位系统的分支,其声源定位结果是空间声场分布云图与真实场景图的结合,然而目前大部分的声相仪仅被视为测量工具,虽然能提供定量数据,但缺乏统一的方法直接对其声学图像与光学图像结合的结果进行综合评价说明,因此需要一种方法对声相云图的声源定位结果直接进行客观评价。
为此,本文提出了一种基于图像处理的声相云图评价方法,分析了声相仪的成像原理,提出将声源定位结果的方位角误差和俯仰角误差作为声相云图声源定位误差的评价指标。利用差影法去除背景干扰,提取声相云图的声源定位成像区域,经过灰度二值化、腐蚀膨胀和加权平均计算之后,通过图像标定将计算所得的成像区域中心像素坐标转换为实际物理空间位置坐标,并与所定位的声源实际位置坐标相比较,计算得到方位角误差和俯仰角误差。
2 声相云图声源定位误差结果评价
声相仪是通过传声器阵列测量一定空间内的声波到达各传声器的信号相位差异,依据相控阵原理确定声源的位置,测量声源的幅值,并以图像的方式显示所测空间的声压分布情况即声学图像(声源定位成像区域),其中以图像的颜色和亮度代表声音的强弱。声学图像和安装在阵列上的摄像头捕获的视频图像被透明地堆叠,以形成被测对象的可视可分析噪声状态,称为声相云图[11]。如图1所示为声相仪定位原理示意图。

图1 声相仪定位原理及误差示意图Fig.1 Positioning principle of sound imaging instrument and error diagram
在声相仪系统的设计中,定位的主要目的是使声源定位结果能够对准所抓拍的声源[12]。然而在使用声相仪的过程中,声相云图在不同抓拍距离平面内其单位像素与实际物理空间的尺寸对应关系是不同的。针对声相仪有效抓拍范围有限和远距离抓拍时声源定位结果较难评价的问题,在分析声相仪定位成像原理的基础上,提出了以方位角误差和俯仰角误差作为声相云图声源定位误差的评价指标。由于这两个评价指标在不同抓拍距离平面内不受单位像素与实际物理空间的尺寸对应关系的影响,因此,在声相仪声源定位结果评价工作中,其方位角和俯仰角的准确与否,可以代表着定位返回的结果能否对准所抓拍的声源。
如图1所示,以声相云图图像中心O点为原点建立坐标系,假设P(x0,y0)为声源实际位置二维坐标点,Q(xi,yi)为声相云图中声源定位成像区域中心对应的二维坐标点,传声器阵列平面与声相片平面的距离为d,将P点与Q点的坐标投影到x方向和y方向,即可计算出相对应的方位角和俯仰角,则声相仪声源定位结果的方位角定义为:
(1)
俯仰角定义为:
(2)
则方位角误差为:
err(φ)=|φi-φ0|
(3)
俯仰角误差为:
err(θ)=|θi-θ0|
(4)
式(1)、式(2)中的参数xi、yi属于声相云图中Q点的像素点坐标,需通过对声相云图进行标定之后将其换算为实际物理空间中的位置坐标进行计算。式(3)、式(4)中的φ0和θ0分别为声源实际物理空间位置坐标P(x0,y0)计算出的实际方位角和俯仰角。
3 声源位置的获取
3.1 声相云图声源定位中心位置坐标的获取
为了求得声相云图声源定位成像区域中心位置的像素点坐标,本文运用图像处理技术对声相云图进行了处理,整个图像处理过程如图2所示。首先利用差影法[13~15]将图2(a)所示的声相云图中含有声源定位成像结果的图片(原图)与未含声源定位成像结果的背景图片进行相减,提取到声源定位成像区域图像即图2(b)。然后进行滤波处理,提高图像质量,使目标轮廓清晰,边界灰度变化明显。通过设置阈值进行灰度二值化处理得到图2(c)后,再进行腐蚀膨胀得到图2(d)所示的结果。

图2 图像处理过程Fig.2 Procedure of image processing
最后采用加权平均的方法将图2(d)中灰度值为255(白色)的像素横纵位置累加求均值得到中心坐标,即声相云图中声源定位成像区域中心的像素坐标。由于求得的坐标是以像素点坐标形式表示的,需通过图像标定得到图像像素点位置与实际物理空间点坐标的关系,进而求得声源定位成像区域中心在实际物理空间上的位置坐标。整个图像处理的流程如图3所示。

图3 图像处理流程图Fig.3 Flow chart of image processing
3.2 声相云图的标定
为了确定声相仪系统所采集的图像中单位像素相对应的实物尺寸的大小,需要对声相云图进行标定。在声源与声相仪传声器阵列正对的平面内,根据张氏标定原理,选用一个已知实际尺寸L0×H0的标准棋盘格,对声相云图的横向和纵向进行标定,计算出图像的横向尺寸当量η1=L0/L1和纵向尺寸当量η2=H0/H1,其中L1、H1分别为所采集的该标准棋盘格的横向尺寸与纵向尺寸,以像素点的个数表示。
标定完毕后,即可根据声相云图的横向尺寸当量η1和纵向尺寸当量η2,求得图像中声源定位成像区域中心在实际物理空间上的位置坐标,因此声相仪声源定位结果的方位角为:
(5)
声源定位结果的俯仰角为:
(6)
4 实验测量过程与结果
在全消声室内,利用声相仪进行声源定位抓拍实验的系统如图4(a)、(b)所示,主要包括声源(喇叭)、声相仪、功率放大器、信号发生装置和计算机。信号发生装置发射单频正弦波连续信号,经过功率放大器放大后驱动声源工作。声相仪对单频正弦波信号激励的声源进行实时定位,并将声源定位结果保存于计算机内。

图4 声源定位实验系统Fig.4 Sound source positioning experiment system
如图4(c)所示,在声源与声相仪传声器阵列中心相距固定距离(1 m、2 m、3 m)的正对平面内,利用声相仪对声源进行定位成像。实验过程中,以声相云图图像中心为坐标原点,规定坐标系的x轴方向为图像的水平方向,y轴方向为图像的垂直方向。当测量声相仪系统声源定位结果的方位角误差时,在声相仪摄像头视场范围内,从水平方向x轴的负方向到正方向等间距地改变安装于水平导轨上的声源的位置,声源移动的范围达到声相仪摄像头水平方向的最大视野范围(-21°~21°),且在每个位置点利用信号发生装置发射信号,经过功率放大器放大后驱动声源工作,声相仪实时对声源进行抓拍。同理,当测量声相仪系统声源定位结果的俯仰角误差时,从垂直方向y轴的负方向到正方向等间距地改变安装于垂直导轨上的声源的位置,声源移动的范围达到声相仪摄像头垂直方向的最大视野范围(-18°~18°),声相仪实时对每个位置上声源发声进行抓拍。
运用本文提出的方法对声相云图进行图像处理获得声相云图的声源定位成像区域中心像素坐标后,通过标定获得声源定位成像区域中心的实际物理位置坐标,并计算得到声源定位结果的方位角和俯仰角,将其与声源实际位置坐标计算得到的真实值比较,则各个距离平面上本文方法所得的方位角和俯仰角结果与真实值结果的对比曲线如图5所示。
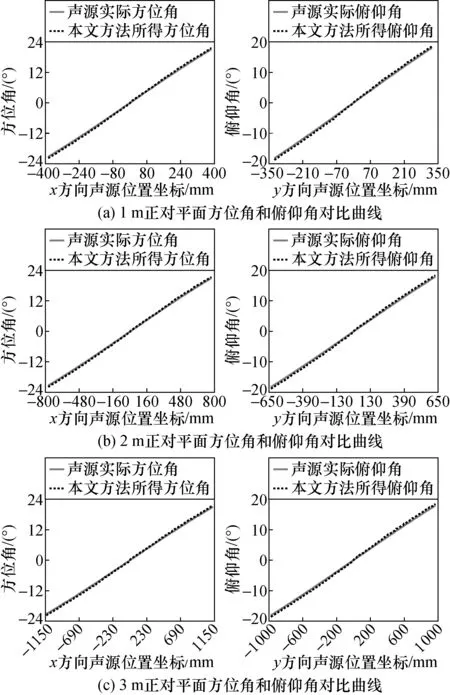
图5 本文方法与真实值对比Fig.5 Comparison of the method and the true value
由图5可得,两者的对比曲线差异较小,趋势相同,因此本文运用图像处理技术对声相云图进行处理得到声源的位置是准确的,且在声源处于x、y方向上的零位置点(图像中心)附近所得的结果,相比较于声源处于x、y方向上远离零位置点所得的结果,更接近于真实值。将图5中两条曲线作误差计算,则各个距离平面上的方位角误差和x俯仰角误差的结果如图6所示。

图6 声源定位误差评价Fig.6 Evaluationof Sound source positioning error
将图6中各个距离平面内方位角误差和俯仰角误差的最大值与最小值提取出来,则方位角误差和俯仰角误差最值情况如表1所示。

表1 不同距离平面方位角和俯仰角最值对比Tab.1 Comparison of maximum or minimum azimuth and pitch angle at different distances (°)
由图6可得,在声源与声相仪阵列距离不同的正对平面内,在声源实际方位角处于(-8°~8°)区间内时,该款声相仪声源定位成像结果的方位角误差分布在0.1°~0.4°之间,而区间外的方位角误差分布在0.4°~0.7°之间,同理其俯仰角误差在声源实际俯仰角处于(-6°~6°)区间内时也分布在0.1°~0.4°之间,区间外的俯仰角误差分布在 0.4°~0.7°之间。实验结果表明,该款声相仪在其摄像头水平方向的(-8°~8°)与垂直方向的 (-6°~6°)的公共视野范围内声源定位误差比其他范围内的误差小,即声相仪在摄像头抓拍视野中心区域(正对传声器阵列中心)内的声源定位性能比视野边缘的定位性能好。进一步地从不同抓拍距离平面来看,在声相仪的有效作用距离内,抓拍距离为1 m、2 m、3 m的正对平面内方位角误差和俯仰角误差的差异不大,由表1可得,不同抓拍距离平面的方位角误差和俯仰角误差的最值情况变化起伏不大,波动不超过0.05°,其声源定位性能一致性保持良好。因此本文方法对声相云图声源定位结果进行评价是有效的。
5 结 论
声相仪用于定位声源位置,利用传声器阵列测量一定范围内的声场分布,并用云图方式显示出直观的声图像,可以确定真实世界物体与声图像之间的空间映射。
针对目前声相仪所拍摄的声相云图缺乏统一的评价方法,以及声相仪抓拍距离较远时,定位结果较难评价的问题,本文提出将声源定位结果的方位角误差和俯仰角误差作为声相云图声源定位误差的评价指标。通过将声相云图的定位成像区域中心在实际物理空间上的位置坐标计算所得的方位角和俯仰角与实际真实值相比较,可得到声源定位结果的方位角误差和俯仰角误差。
实验结果表明,本文结合图像处理技术对声相云图声源定位成像区域进行提取,并根据成像区域中心位置坐标计算出方位角和俯仰角,与采用声源实际物理空间位置坐标计算所得到的真实值相比,两者差异较小,该款声相仪在摄像头抓拍视野中心区域(正对传声器阵列中心)内的声源定位性能比视野边缘的定位性能好,且在系统有效作用距离条件下,不同抓拍距离平面的声源定位性能一致性保持良好。因此本文方法能够对声相仪声相云图空间声场分布云图与真实场景相结合的定位结果进行统一评价,便于对声相仪的性能分析,且图像处理过程操作简单。
此外,本文实验是在室内消声室环境下进行测试的,关于室外现场声相仪声源定位结果的研究今后将继续推进,以便能够更全面地对声相仪的声源定位误差结果进行评价。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
结构工程师(2022年2期)2022-07-15
现代临床医学(2022年2期)2022-04-19
空间科学学报(2020年4期)2020-04-22
电子制作(2019年15期)2019-08-27
电子制作(2019年23期)2019-02-23
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25