
临近空间高超声速飞行器天文导航系统综述
2020-09-10 03:25陈冰郑勇陈张雷章后甜刘新江
航空学报 2020年8期
陈冰, 郑勇, 陈张雷, 章后甜,2, 刘新江,3
1. 信息工程大学,郑州 450001
2. 洛阳理工学院 土木工程学院,洛阳 471023
3. 32021 部队,天津 300140
临近空间是指海拔高度在20~100 km的空域[1]。如图1所示,它在大气对流层之上,覆盖了平流层、中间层和热层的下边界部分,环境条件跨度较大,是航天与航空业务领域的结合部,在即将到来的空天一体化联合作战中具有重要战略价值[2]。临近空间飞行器可分为低速和高速2类。低速平台可实现长航时区域驻空,并在兼顾覆盖范围的情况下显著提高分辨率;高速平台则具有远距离机动投送和快速进入临近空间的响应能力[3]。

图1 临近空间的高度范围
高超声速飞行器(Hypersonic Vehicle)是近年来发展迅速的临近空间高速平台的代表。它采用高升阻比的气动外形设计及高超声速滑翔、火箭发动机或超燃冲压发动机推进技术,以实现高超声速、高机动性等功能,因此具有作战响应迅速、突防能力强等特点。
2000年以来,美、俄、德等国的临近空间高超声速飞行器已先后投入试飞试验,获得了大量数据资料[4-7]。
导航技术是临近空间高超声速飞行器的核心支撑技术之一。NASA针对高超声速飞行器的导航模块设计要求是“为飞行器管理系统(Vehicle Management System,VMS)提供连续精确的、以本地高度和地理坐标表示的飞行器位置和姿态”[8]。
导航系统获得的观测数据对飞行器的姿态控制、轨迹调整起着至关重要的作用。天文导航技术作为定姿精度最优、高度自主可靠的技术手段,在临近空间高超声速飞行器的导航、制导与控制中得到了初步应用。
本文介绍了近年来投入实际飞行试验的部分临近空间高超声速飞行器的导航系统情况,分析了高超声速飞行器的飞行环境和任务特性,论述了天文导航应用的关键问题及技术进展,对临近空间高超声速飞行器应用天文导航的相关问题进行了研究,指出了发展方向。
1 临近空间高超声速飞行器及其导航技术
高超声速飞行器是一个快速发展的新领域。在原理和原型试验阶段,研究人员主要聚焦于“能不能飞”的问题,动力系统、控制系统、材料等一系列更尖锐的难题被放到突出的位置,对飞行器飞行轨迹要求则相对简单。
国外开展实际飞行试验的高超声速飞行器都采用了组合导航手段,将惯性导航系统(Inertial Navigation System, INS)、全球卫星导航系统(Global Navigation Satellite System, GNSS)与航空数据处理系统集成运用。
早期方案通常以INS+GNSS的组合方式为主。其中, GNSS用于更新校正INS,而航空数据处理系统提供实时的空速、迎角、压力和高度等数据。随着高超声速飞行器研制和武器化进程的逐渐推进,对飞行器航程、高度、机动、精度和鲁棒性的要求日渐凸显,导航手段也更加多元,天文导航系统(Celestial Navigation System,CNS)被应用于飞行中段,差分GPS、合成孔径雷达(SAR)等技术被应用于飞行末段。部分高超声速飞行器的试验目标和导航方案的选用情况如表1所示[5,9-16]。
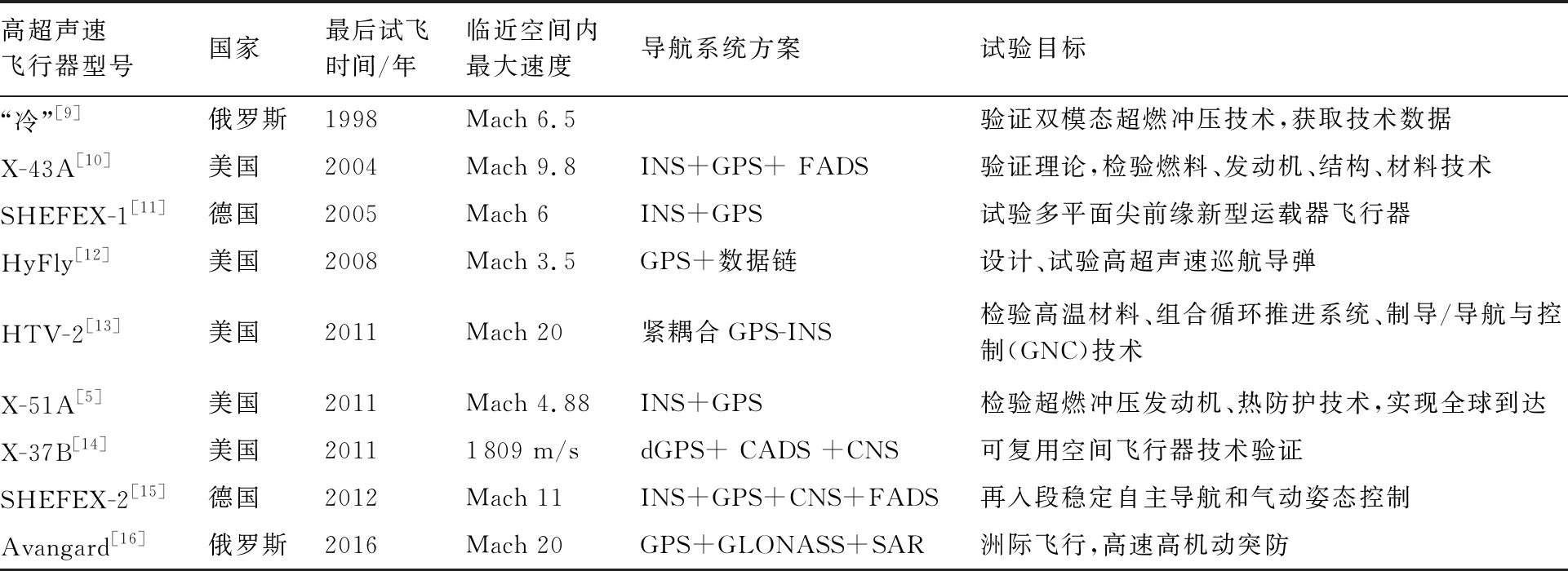
表1 国外高超声速飞行器的试验目标和导航方案
在军事应用方面,NASA和美军希望量产的高超声速武器,首先要实现2 h内8 000 km的投射,并最终达到2 h内全球覆盖[17];要求其保持较高的末端机动性能和突防/拦截能力,基本实现智能化的自主导航,并具备足够的抗干扰、反摧毁能力,从而满足对全球关键目标的精准打击[18]。2017年10月,美军在夏威夷考艾岛导弹试验基地进行了高超声速助推滑翔导弹首飞试验[19]。该类型导弹所支持的跳跃式滑翔能够在纵向平面进行多次跳跃机动[20]。2018年3月,俄罗斯宣布已经拥有高超声速导弹“Avangard”;同年,美国海军作战部长约翰·理查德森宣布海军 “到2025年将开发和部署进攻性高超声速武器”,在潜艇和驱逐舰全面安装高超声速武器的垂直发射模块[21]。
这就意味着高超声速飞行器技术已经全面用于武器装备领域,其导航系统也将超越理想试验环境,直面临近空间内长时间高速巡航、高过载机动突防、承受高强度导航干扰对抗等实战条件的检验。
可以预见,在高强度导航战对抗条件下,GNSS系统有很大概率失效或者精度降低,在极端条件下,甚至可能被彻底破坏。临近空间内高超声速飞行器的组合导航如果严重依赖GNSS的正常运行,很难实现稳定可靠的自主导航。
惯导、天文导航等自主导航手段将成为导航战条件下高超声速飞行器导航的“保底”手段。惯性导航系统的精度取决于陀螺和加速度计的精度控制水平,其误差会随时间累积而趋于发散。天文导航技术以不可摧毁的星体作为导航信息源,可以提供精度最高的定向信息,为控制惯导的误差发散提供关键的航向、姿态等校正信息。美、俄等国一直投入大量资源进行天文导航系统的理论研究和产品研发。NASA很早就意识到高超声速飞行器应当不依赖GNSS和航天飞机所需的全球分散地面支持系统,绝大多数重要的导航系统要素和实时飞行规划能力都必须在飞行器上得到实现[8]。美军要求在国家层面的定位、导航与授时(Positioning, Navigation and Timing, PNT)体系内突出天文导航的战略作用,保持美方的优势地位[22]。
2 临近空间高超声速飞行器天文导航应用情况
目前,天文导航技术主要是利用敏感器观测自然天体获得星图,进而从星图中解析获得导航信息,包括解算载体位置、速度、姿态等信息[23]。在20世纪30年代无线电导航技术投入应用之前,天文导航一直是唯一稳定可行的导航技术[24]。
天文导航系统已经在航空领域,特别是战略级大型航空器上得到广泛应用。美军SR-71高空侦察机、B-2远程战略轰炸机上就安装了加州诺斯罗普公司研制的NAS系列天文/惯性导航系统。它跟踪3颗星定位所需时间约为1 min,姿态精度优于3 s,定位精度优于350 m。RC-135侦察机采用的LN-120G高精度GPS增强型天文组合导航系统,集成了零锁陀螺仪、先进加速度计和新型望远镜技术,组合导航时的航向角误差小于20 s。俄罗斯的Tu216、 Tu295、Tu2160 轰炸机等均使用了天文导航设备[25]。
2.1 临近空间飞行环境与高超声速任务条件
临近空间高超声速飞行器上,天文导航系统应用的飞行环境和任务条件不同于一般航空器。其飞行环境的特殊性主要体现在以下几个方面[26]:
1) 大气密度显著降低。由于大气密度随着高度下降,在30 km高度,大气密度只有地表的1%;到50 km,只有地表的1‰;到80 km,只有地表的0.02‰。
2) 大气条件相对稳定。风雨雷电等天气现象是由区域内空气温度、湿度、压强的剧烈变化所导致的,在高度较低的对流层内尤其显著。临近空间高度在20 km以上,大气温度、湿度、压强已无显著变化。临近空间内基本没有上下对流,也没有雷电风暴等天气现象。
3) 平流层内(20~55 km)大气水平方向环流速度较低。根据美军观测,20~24 km高度区间内的风速平均不到9 m/s,30 km高度的风速平均为18 m/s;根据模型,37 km以上的风速也不会超过25 m/s。
4) 宇宙射线通量高,高能粒子辐射强度大。临近空间处于大气平流层以上,在40 km以上大气中几乎没有臭氧。来自宇宙空间的高强度紫外线未经臭氧吸收,造成大气的电离作用,形成大量自由电子、离子,其密度高于大气层均值的30倍以上。
另一方面,高超声速飞行器的任务条件也和一般航空器不同,主要有以下几方面:
1) 高超声速飞行器以5Ma甚至更高的速度在临近空间内飞行,飞行区域跨越平流层、中间层,使得飞行器外部的局部大气密度变化范围大、温度变化迅速而复杂。
2) 高超声速飞行器的飞行状态、环境条件和机身产生很强的气动耦合,容易引起飞行轨迹和姿态的剧烈变化,对实现飞行器导航、制导和控制提出了更高的技术要求[27]。
3) 高超声速进一步放大了气动干扰,局部流场中的激波和边界层被放大,在亚声速、声速级别飞行时被忽略的气动光学效应被放大,飞行器表面材料的烧蚀效应也会产生影响[28]。
4) 机动时产生高过载可能达到40g以上,对导航系统的结构强度、稳定性、连续性提出了更高要求[18]。
2.2 临近空间内天文导航的应用与挑战
临近空间内高超声速飞行器所处的环境和飞行条件对天文导航系统的应用各有利弊。一方面,大气密度的显著降低和大气条件的相对稳定,使得天文导航的观测受气象条件的影响减弱;另一方面,高超声速飞行、高过载机动、环境剧烈变化引发的飞行气动耦合、气动光学效应又给天文导航的应用带来了新的困难。
德国于2012年发射的SHEFEX-2试验飞行器采用了惯性导航、GNSS导航和天文导航的组合[29],如图2所示。其中,天文导航组件并没有采用高精度、高成本的方案,而是选用了Prosilica公司的电荷耦合器件(CCD)设备进行改装[30]。SHEFEX-2飞行器的天文导航设备在助推段结束之后就开始运行[11],有效减少了助推段运动产生的姿态误差[31]。

图2 SHEFEX-2采用的天文导航设备[32]
需要注意的是,SHEFEX-2上搭载的天文导航系统主要是在高于临近空间的高度区间内运行工作,从而进一步降低了大气影响。但另一方面,这种策略并未直接克服临近空间内的飞行气动耦合、气动光学效应等难题。
3 临近空间高超声速飞行器天文导航的发展方向
未来的高超声速飞行器不仅需要在助推、巡航段进行天文导航,在再入段也需要。复杂飞行环境和条件所带来的特殊性,给天文导航在临近空间高超声速飞行器上的应用提出了新的要求,这也为未来应用发展需重点研究的技术问题指明了方向。本文分析认为,发展方向主要集中在高适应性、高精度、高更新率、工业化等方面。
3.1 扩展观测频谱,提升星图采集效能
长期以来,自动化的星图采集都是利用CCD和互补金属氧化物半导体(CMOS)作为主要的成像元器件。
CCD传感器技术发展相对成熟,能实现高灵敏度、宽光谱响应、低读出噪声和大动态范围。早期美国ASTROS系列、法国SED系列星敏感器,都是以CCD作为成像元器件[33]。但是CCD的体积、重量、功耗较大,对辐射较为敏感[34]。
早期的CMOS图像传感器具有电路设计简单、帧频高、可片上集成图像处理单元等优点[35]。但是由于其非全局快门的曝光方式,使得CMOS不适用于高动态的成像需求。
近年来,成像元器件的制备有了长足进展,新型传感器逐渐进入工程应用阶段。其中就包括电子倍增电荷耦合器件(EMCCD)和有源像素传感器(APS)CMOS。
EMCCD与传统CCD相比,增加了固态电子倍增结构,可以在信号电荷进入读出放大器前先进行电荷倍增放大,从而达到普通CCD灵敏度的数百倍。在理论上可以在特定光学系统条件下,将探测10等星的积分时间缩短到6 ms以内。但是,EMCCD的电荷倍增效果与芯片温度密切相关,温度越低,倍增效果越显著[36]。这就要求增加制冷和温控设备,保持EMCCD的运行环境始终处在较低温度。
APS技术的发展使得CMOS的信噪比、灵敏度和动态范围都有很大的提高。COMS APS可以支持20°×20°的更宽视场,从而保证视场内有更多恒星可供识别,以减小导航星库的大小和提高导航星库的搜索速度,提高姿态更新的速率,而且可支持更高的集成度。因此COMS APS已成为近年来星敏感器发展的主流方向。意大利的A-STR系列和德国的ASTRO APS系列星敏感器就是代表。国内的北京控制工程研究所、北京航空航天大学、清华大学等单位研发了YK010、SS2K、NS-1等多个型号的星敏感器。2012年以后,国产星敏感器在小型化和快速性等关键性能指标上已经达到国际领先水平[37]。
临近空间的星图采集具有一定优越性。大气散射的背景辐射随着海拔高度的增加而显著减小,相同星敏的可探测极限星等几乎是随着高度线性增加的。研究表明,在恰当曝光时间下,15 km 高度仅能观测到3~4等星,在25 km高度已可以观测到6等星,40 km则可以观测到9等星[38]。相较于地面和20 km以下的低空,在临近空间的高度上可以捕获更多的星点信息。
临近空间高超声速飞行器天文导航必须要考虑白天观星和高背景辐射等情况。太阳辐射的峰值波长在0.5 μm左右,在J、H、K 3个短波红外波段的太阳辐射功率远低于可见光。因此,利用短波红外进行恒星观测,可以削弱太阳辐射的影响。根据2MASS(2微米全天巡天计划)发布的数据和Tycho-2、UCAC星表的对比,在白天条件下,短波红外段能观测到的恒星数量多于可见光波段。当观测视场为2°×2°时,视场内可探测到H、K波段内3颗不高于6.5等恒星的概率为99.99%;若观测视场扩大到2.5°×2.5°,则概率上升到100%,从而满足多星矢量定位的要求[39]。
已有研究提出采用InGaAs(铟镓砷)短波红外探测组件作为星图的成像元器件。InGaAs传感器相对于CMOS在白天观星时有较为显著的优势[40],尤其是能在0.9~1.7 μm波段可以在非制冷的室温条件下工作,从而大大提高了可靠性,降低了载荷成本。国内也已初步具备制备线列和平面型InGaAs元件并控制其噪声水平的能力[41]。
3.2 开展光学过程的误差模型构建与标校,控制气动效应误差
敏感器获取的星图质量直接影响测量和解算的精度[42]。天文导航的核心是星图的获取和处理。如图3所示,天体发射的星光要经过大气远场、大气近场和光学窗口,并通过舱体内的成像器件,最终在光敏元器件上成像。
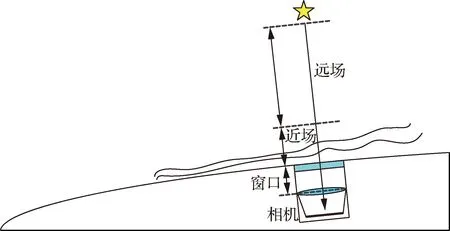
图3 星光传递的光学过程
临近空间飞行器的高度在20 km以上,基本可忽略远场大气的影响。但它在临近空间内高超声速飞行时,机身与大气的相对运动将形成强大的来流,进而产生激波、膨胀波、湍流边界层等复杂流场结构,直接影响到飞行器周围邻近的密度场、压力场和温度场[43]。因此,高超声速飞行器光学观测受到的近场、光学窗口影响是无法忽略的。NASA提出,临近空间高超声速飞行器速度在3Ma以上时,会对外部环境和载体间的复杂作用产生重要影响。如果不对其进行详细的动力学分析和控制设计,可能会导致飞行器设计的缺陷[44]。
国内研究人员将高速流场气动光学效应分解为层流和湍流2种流场结构进行估算。在给定口径、焦距、波段的光学系统条件下,取入射角为40°,飞行参数为高度10 km,速度为3Ma时,产生的像偏移导致的半视场角误差在6"左右[45]。在不考虑气动光学的理想状况下,国内的星敏感器产品目前能实现优于10"的姿态输出。因此,对于临近空间飞行器的天文导航,气动光学对星敏感器、尤其是大视场星敏感器的影响不可忽略。
气动光学影响主要有2方面:一方面作用于观测窗口的压力场和温度场的变化和不均匀,会造成窗口材质的压力梯度和温度梯度,进而引起形变,导致窗口材质的折射率发生变化[46],即光学窗口的热光学效应问题。这已得到了许多学者的关注和研究[47-48]。
另一方面,星敏感器光学成像探测系统必须以光学头罩、开窗、转台等结构与外界联通的问题。光学头罩等非连续结构与外部气流发生剧烈相互作用时,将在其周围形成微观的激波、湍流边界层、剪切层、尾迹等复杂流场结构[49]。外部光线通过该复杂流场时,会受到混合层气体密度梯度的变化和气动加热的多重影响,导致光束产生波面畸变、偏折、模糊、抖动、能量衰减等现象,进而对星图成像产生重大影响[48,50]。气动光学效应中,流场结构形态及性质与航空器的飞行状态、气动结构、观测窗口位置的布局密切相关,这可能会造成定位定向误差的进一步扩大。
国内许多天文导航的研究,都是基于理想星图展开的。但高超声速飞行受环境的严重影响,是无法获得理想星图的[51]。采集到的原始图像包含了大气远场、近场和光学窗口的影响扰动。如何科学描述这些扰动,并对其造成的图像退化进行校正和复原,成为一项不可或缺的重要任务。近年来,地面静风洞试验技术[52]、计算流体力学(Computational Fluid Dynamics, CFD) 数值计算技术[53]的发展,为研究近场影响提供了有力的支撑手段,为建立光学过程的误差模型和校正模型创造了条件。
3.3 挖掘多视场、大视场观测解算机理,提升自主基准可行性
第1代星敏感器受到当时CCD面阵大小等因素的限制,视场较小。美国JPL研制的STELLAR视场仅有3°,只能对视场中的亮星进行跟踪,不具有自主星图识别能力[54]。
20世纪90年代后,大面阵高光学转换灵敏度CCD、高性能微处理器和各种优化姿态算法用于第2代星敏感器,使得它能扩大视场、压缩星表、探测暗弱星等、实时输出高精度姿态信息,并能独自完成初始姿态捕获,从而解决“空间迷失”问题[55]。这一代星敏感器的视场,早期大都在8°以上,近年来已达到20°,但仍然无法实现单镜头高精度的三轴姿态测量。因为单镜头每次仅能对某一方向邻域内的恒星成像,其观测结构会导致滚动角约束相对较弱,从而使其精度比俯仰和偏航角低约一个数量级。
为了得到高精度的三轴姿态,目前主要采用多视场组合[56]。但这种方式需要多个星敏感器构成一个统一的系统,不利于系统的小型化,与目前低功耗、小重量、小体积的发展趋势相悖。
国内研究者提出了另一种实现高精度三轴姿态获取的方式,就是采用鱼眼等超大视场星敏感器。通过单镜头获取超大视场星像,可改善观测结构,提高算法的稳定性以及解算精度,从而提高滚动角测量精度。超大视场内可包含更多的亮星,即使减少采用暗星数量也不会影响定姿性能,因此可减小导航星表的存储容量占用、提高星图识别速度。但是该方法的实现也需要解决很多技术问题,如超大视场的畸变校正,杂散光的干扰、星点提取算法的优化等[57-58]。
超大视场的运用,为单视场星敏感器直接敏感地平,以及利用星光折射间接敏感地平提供了可能,并可依据导航星和地球之间的几何关系,结合轨道动力学方程和先进的滤波方法实现的自主基准和自主导航[59]。有国外研究者提出通过“星光陀螺”的概念来完成自主定姿。仿真结果显示,当载体姿态角速度小于420 (°)/s时,星光陀螺可以估算姿态角速度;当载体角速度低于50 (°)/s时,则可实现姿态角的观测和解算[60-61]。
3.4 优化星图处理算法策略,提升天文观测解算的数据更新率
姿态更新率是指载体有效姿态数据的最高输出速率,是天文导航系统性能的一项重要评价指标。国外天基星敏感器的姿态更新率一般在10 Hz 左右,少数产品达到30~50 Hz[62],也有专用的高速星敏感器可达到100 Hz[63]。德国SHEFEX-2高超声速飞行器采用的天文导航系统整体姿态更新率仅为2 Hz,而同时搭载的惯性测量单元(Inertial Measurement Unit, IMU)更新率为500 Hz,这就使得两者进行组合导航时,频率匹配和对准都成为一个必须解决的问题[64]。
影响姿态更新率的要素包括星敏感器曝光时长、图像存储耗时、星图数据处理效率和姿态数据通讯延时。其中,曝光时长和图像存储耗时的优化主要依靠元器件技术提升。也有研究者从运行机制角度,提出了采用二级流水机制,开展均衡并发处理的方法,并指出姿态数据通讯延时影响不大[65]。影响星图处理效率的要素主要包括导航星表遴选优化、高精度星点提取和快速星图匹配等。
建立导航星表的关键是遴选原则和制备技术。星表的遴选一般都遵循Vedder提出的“提高导航星分布的均匀度”和“减少导航星的数量而不降低性能”2个基本原则[66]。临近空间高超声速飞行器导航星表的遴选,是要在充分考虑飞行器外部飞行环境特性、机动特性,以及感光元器件性能特性、星敏感器视场特性的基础上[67],拟制更有针对性的遴选原则,从而进一步压缩星表规模,减小星点匹配运算量。星表的制备通常须在飞行任务开始之前完成,具体制备技术手段已较为丰富[68-69]。
星点提取就是对星敏感器捕获的星图进行处理,从中提取恒星在星图平面坐标系中的准确位置。星点提取精度将直接影响后续星图识别的准确率[70]。传统的星点提取算法主要包括图像滤波、分割、连通区域划分和恒星质点确定等步骤。相对于天基平台天文导航,临近空间高超声速飞行器天文导航更需要注重非均匀背景噪声的去除。这种非均匀噪声有2个来源:一是高超声速飞行器观测窗口表面流场的温度非均匀性[71-72]。二是内部环境温度变化诱发的成像元器件非均匀性噪声[73]。这种非均匀性会随着星敏感器视场的扩大而变大[74]。
星图快速匹配的研究方向是在最优路径[75]、形状因子等多特征匹配[76-77]、相近模式向量等方法的基础上,继续开发先进算法,在经过优化的有限星表内进行更高效搜索,从而进一步提升天文观测解算的数据更新率。
3.5 推进小型化、模块化、工程化技术
由于包含了观测镜头、成像装置、伺服机构和数据处理设备等,天文导航系统的体积和重量一般都相对偏大,这会加大飞行器的推进负荷,占用更多载荷空间。高超声速飞行器对流体外形和载荷效率的要求比一般航空器更加严格。因此,其设备的结构应当在保持性能的前提下尽可能简化、重量体积应进一步缩小。前端观测部分向捷联轻量化方向发展,利用原理突破,简化镜头及伺服机构的结构;后端处理部分向芯片化、智能化方向发展,进一步缩小体积、降低功耗[78]。2002年,美国Liebe等完成的MAST星敏感器已经实现了70 mW 的超低功耗和42 g的超小质量,但在性能上受到一定限制。同期的国内产品也能控制在功耗5 W,质量1 000 g以内[79]。到2016年,国外微型星敏感器镜头产品已经实现质量11 g,测量精度5.5″。国内微型星敏感器镜头的理论设计值也能控制在15 g以内,单星测量精度2.14″[80]。
长春光机所、北京控制工程研究所、北京空间机电研究所、上海航天技术研究院第803研究所、北京航空航天大学、清华大学等多家单位都具备生产定型星敏感器及完整天文导航系统的能力[74,78,81]。但大都是为了特定试验功能而开发的定制产品,尚未做到严格的标准化、系列化、规模化,与美军“一型多变,一型多用”跨平台、高扩展性的生产方式还有一定差距。
目前,国内大量的研究工作都是基于理想的条件假设展开的,研究手段也以数值仿真为主。后续研究应向工程化方向发展,着重对影响天文导航性能的现实因素开展研究,如实际飞行中可能发生的气动热效应、气动光学效应、等离子鞘套体、大过载机动、飞行载体内外温度变化等[82]。
4 结 论
经过数十年的发展,临近空间高超声速飞行器相关技术已经逐渐进入装备应用阶段。临近空间高超声速飞行器将会面对越来越严峻的飞行条件和任务环境。对GNSS导航技术的依赖将会严重影响飞行器的导航性能,削弱其对抗能力和自主能力。天文导航技术可以提供高精度和高自主性的导航支撑。由于临近空间高超声速飞行器飞行条件和任务环境的特殊性,使得天文导航的应用面临着一定困难。本文认为,通过星图采集效能、光学误差模型、视场观测机理、姿态更新速率、小型化模块化工程化等5个方向的研究和突破,天文导航技术必将在临近空间高超声速飞行器的导航领域发挥更大、更重要的作用。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
军事文摘(2022年12期)2022-07-13
航天返回与遥感(2022年3期)2022-07-07
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年6期)2021-07-20
学与玩(2021年8期)2021-01-23
北京航空航天大学学报(2020年3期)2021-01-14
综艺报(2019年15期)2019-08-16
百科探秘·航空航天(2019年2期)2019-06-11
