基于图像识别的打靶机器人
2020-09-10 07:22徐春鹏
信息技术时代·下旬刊 2020年5期

项目名称:沈阳理工大学大学生创新训练项目(项目编号:201810144060 )
开发了一种基于图象识别的机器人打靶构架。该架构使用OV5640摄像机获取目标表面图像,并在进行图像处理和目标表面识别后获得拍摄结果。它使用图像抓取并且预处理的方法,例如图像颜色特征,灰度分析和阈值分析等。使用局部特征识别来对目标进行检测,并用灰色特征来分析目标区域,并用STM32F407单片机来进行实时处理。
图像处理;灰度分析;OV5640摄像头;STM32F407
引言
移动激光目标系统的军事意义广泛。其提高了训练水平,降低了训练费用,并确保了使用人员的安全。硬件成本低,后期维护方便,采用图像处理算法,可在复杂的光照环境下清晰拍摄获取目标特征。激光打靶可以根据目标运动状态分为固定目标和移动目标两种类型。对运动目标的目标跟踪已成为需要解决的问题之一。在移动目标的移动中识别激光点,需要进一步的研究和开发改进。
1、总体设计方案
打靶机器人是将数字图像处理技术和嵌入式应用技术集成在一起的模拟射击机器人。它使用特质弹丸来进行射击训练。图像接收端使用OV5640摄像头获取目标图像,并通过图像处理技术和目标识别算法,包括灰化二值化,目标识别,中心确定和点识别。等等,实现了拍摄功能,可以满足系统对实时性和可靠性的高要求。
2、弹丸结构设计方案
2.1拨弹结构
图3.1为拨弹电机结构:
为了做到弹丸的再次收集与排列,设计类似转盘的结构,对弹仓里的弹丸进行搅动,并收集至弹槽。将弹丸可控的送去发射机构,需要控制拨盘转动角度,我们选择带有旋转编码器且体积相对较小的2310电机。
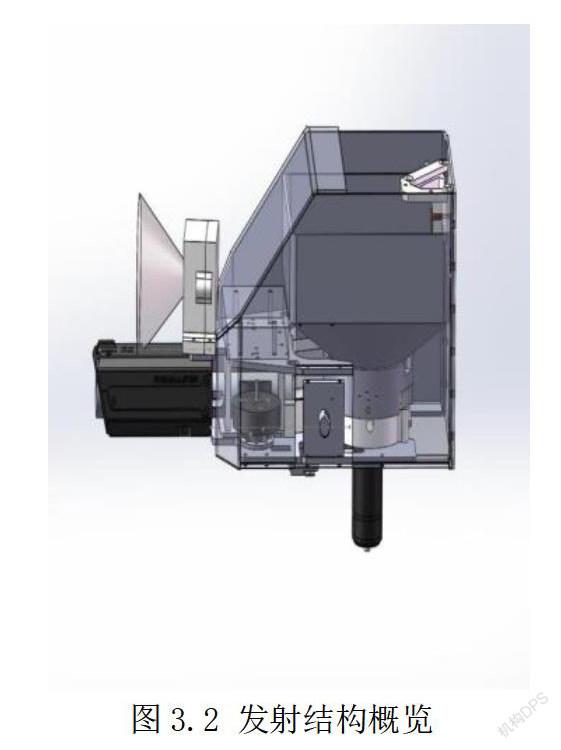
2.2发射结构
发射结构概览图如图3.2所示
输弹口末端,摩擦轮前端,放置有限位开关,当拨弹机构开始旋转,弹丸被摩擦轮挤出,下一颗弹丸触碰限
位开关,拨轮停止转动,能有效的减小发射延迟,也可简单修改编程的三连发,多连发的逻辑。
3、摄像头选择
3.1摄像头选型
我们选择500万AF自动对焦摄像头OV5640.
工作温度:0°C to 60°C
最高有效像素:2592 (H) *1944 (V)
物距:5CM-100M
中心清晰度:600LW/PH (Center)
信噪比:34dB
最低照度:0.5lux
结语
在软件方面,使用C语言编程方法来开发直流电动机和驱动器,从而实现控制相关组件完成各自任务的应用程序。在硬件方面,以STM3F407单片机为控制核心。摄像机和触摸屏用于完成图像信息的收集和显示,实现自动目标报告的功能。
参考文献
[1]李虎,张健.基于自动识别的自动打靶机器人系统[J].单片机与嵌入式系统应用,2017,17(12):71-74.
[2]罗杰,张之明.基于图像处理技术自动报靶系统综述[J].激光杂志.2016(07)
[3]任志敏.基于STM32F407的图像采集系统设计[J].山西电子技术.2016(03).
作者简介:徐春鹏(2000.01-),男,學历:本科,吉林省榆树市人,单位:沈阳理工大学,研究方向:机械设计。
猜你喜欢
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
科学与财富(2017年30期)2018-01-01
电脑知识与技术(2016年23期)2016-11-02
科技资讯(2016年9期)2016-05-14
小学生·多元智能大王(2015年12期)2015-12-05
网络与信息(2009年6期)2009-07-31
网络与信息(2009年5期)2009-05-29