仿生波动鳍推进的两栖航行器
2020-09-10 07:22谢萍张晓月
信息技术时代·上旬刊 2020年1期
谢萍 张晓月
本作品利用介电弹性体在外界电刺激作用下产生应力和应变,将电能转换为机械能的特性设计了一款模拟鱼类鳍部肌肉运动的海洋航行器。该装置有效地解决了现有海洋航行器不能在复杂的两栖环境中运行的问题,而且由于仿生波动鳍采用了柔性结构设计,对水下生物十分友好,不会影响行驶水域内的生态环境,在满足陆上工作与水下航行条件的同时,在一定程度上解决我国海洋资源探查、两栖作业等方面的现实问题。
波动鳍;介电弹性体;两栖航行器
一、研究背景及意义
浩瀚的海洋中蕴含有丰富的生物资源、矿产资源和能源,人类在水下环境中进行生产、科研等活动越来越频繁,水下任务的要求也不断提高,人工操作的方式从成本、安全性、效率上逐渐不能满足复杂水下任务的要求。近年来,一些智能的自主水下航行器被广泛应用于海洋开发、海洋研究、水下环境保护等领域。
目前多数水下航行器推进设计原理为:由螺旋桨产生推力,结合可操控的舵面产生机动控制力。这种机构设计对于推进器以巡航速度行驶于空旷平静海域的应用领域是經济有效的。但出于其机动控制力依赖于流体在操控舵面上的流动产生的升力,在低速下难以实现机动。此外这类推进器会在尾迹中产生大量大带宽的噪声,导致一些水下生态系统遭到严重破坏。因此,水下推进器在低速下的有效性、机动性以及噪声与尾迹的控制是制约当前水下航行器效能发挥的主要因素。
本项目为改进传统水下航行器使用的螺旋桨式推进方式,着眼于仿生技术,模拟利用鱼类游动,诸如弓鳍目、裸背鳗科和鳞纯科等鱼类,采用柔性长鳍波动的游动模式,生存于狭小恶劣的环境,具有良好的推进效率、机动性与稳定性,不仅能够远程迁徙,还具有灵活机动、抗扰动能力强,尤其擅长于低速下的机动等特点设计了一款水路两栖式波动鳍推进航行器。
二、设计方案
1 结构设计
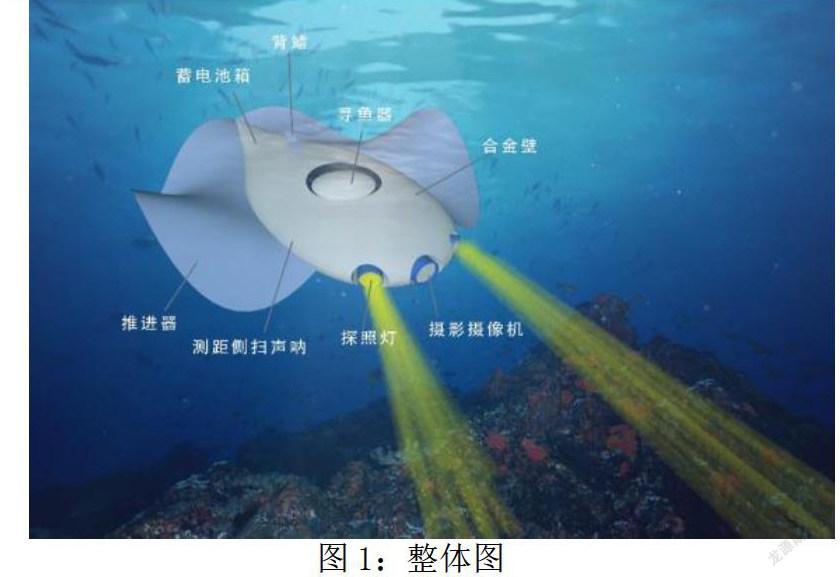
装置整体由主体结构和两侧波动鳍组成,主体结构的设计思路为图1所示,在航行器的艏端为摄影摄像机和探照灯用于海底勘探;中部搭载智能寻鱼器,可以检查鱼群数量数量和尺寸,近距离观察鱼群健康状况;艉部安装有蓄电池箱,能够将电能储存起来,在需要时通过其放电来提供动力;侧部安装有测距侧扫声呐,可以测量观测物与航行器之间的距离,有利于搜寻垃圾污染物以及收集海洋生物信息。航行器两侧为波动鳍,作为主要的推进器,实现航行器前进、后退、转向和浮潜的功能。
2 介电弹性体驱动器工作原理
介电弹性体驱动器是由介电弹性体薄膜和其两侧涂覆的柔性电极组成。当在驱动器上下电极施加外界电场,材料内部电荷重新排布,接近同一电极的材料表面形成相互排斥的同性电荷,使材料在宏观上表现为横向扩张;同时,在材料纵向方向形成相互吸引的异性电荷,使材料在宏观上表现为纵向压缩。当电场撤销后,材料内部的电荷又回到无序状态,使得材料恢复到原始的形状和体积,从而实现电能到机械能的转换。
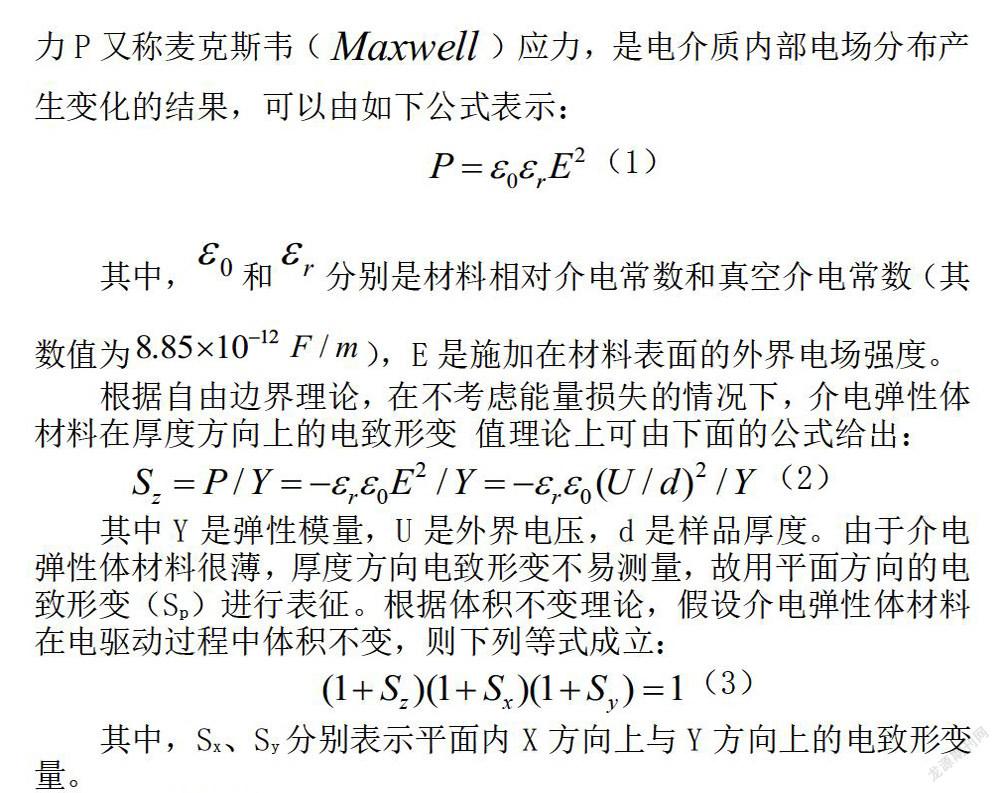
电致形变驱动是由静电应力和弹性应力的耦合产生的,静电应力P又称麦克斯韦(![]() )应力,是电介质内部电场分布产生变化的结果,可以由如下公式表示:
)应力,是电介质内部电场分布产生变化的结果,可以由如下公式表示:
三、创新特色
(1)基于波动鳍推进模式的设计方案为海洋航行器的仿生设计提供了一个新的思路和选择。
(2)波浪形飘带的柔性结构对海洋生物十分友好的同时避免了大范围的扰动。
(3)波状鳍的结构为海洋航行器提供了新的运动方式。
(4)采用新型材料的海洋航行器对环境的满足度很高,既可以水下航行,又可以在陆地上行走。
四、应用前景
(1)在近海及其他滩涂等复杂情况下,克服恶劣的环境条件,携带高性能作业和勘探设备,实现自主、快速、有效的两栖作业。
(2)针对野外传感干扰严重、两栖跨介质导航的特点,建立统一多模态传感框架,通过对绝对位置估计、多机相对位置估计以及环境地图描述,帮助人类在复杂环境下实现安全高效监测地形。
(3)海洋垃圾污染近些年来越来越受重视,此航行器对环境十分友好的特性有助于其在近海区域收集数据以及搜寻海洋污染物,保护海洋、保护海洋生物。
(4)航行器搭载了智能寻鱼器,可以通过手机APP实时动态监测海底鱼情、检查鱼群数量和尺寸,近距离观察鱼群健康状况。还可以对网箱、人工鱼礁、锚链进行安全检查,实现渔民对渔场的智能化管理。
参考文献
[1]王睿,王硕,魏清平.仿鱼长鳍波动推进水下航行器研究进展与分析[J].自动化博览,2015(07):70-74.
[2]王光明. 仿鱼柔性长鳍波动推进理论与实验研究[D].国防科学技术大学,2007.
[3]林龙信,沈林成,张代兵.仿生波动鳍的试验研究[J].哈尔滨工程大学学报,2008,29(5):489-490.
[5]姚洋.低电压下大电致形变聚氨酯介电弹性体的设计与制备[D].北京:北京化工大学:材料科学与工程专业, 2015:1-2.
[6]孙檀.仿生鳐鱼水下机器人的设计及数值模拟研究[D].宁波:宁波大学机械工程与力学学院,2018:13-14.
猜你喜欢
现代企业(2021年11期)2021-12-08
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
中国计算机报(2019年29期)2019-09-18
语文世界(小学版)(2019年3期)2019-03-18
小资CHIC!ELEGANCE(2018年24期)2018-08-13
创新作文(1-2年级)(2017年7期)2017-12-26
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
棋艺(2001年7期)2001-06-14