一种五轴联动式3D打印机的结构设计
2020-09-10 22:23姜汝意李同洲陈星一周洋
内燃机与配件 2020年6期
姜汝意 李同洲 陈星一 周洋

摘要:三轴3D打印机打印过程中的支撑会对打印质量造成很多影响,例如,支撑难以去除、表面质量不佳、打印时间长、材料利用率低等问题。为此,我们在三轴3D打印机运动原理基础上结合自动焊变位机[1]工作原理,在原有三轴打印机的基础上增加A轴(翻转轴)及B轴(旋转轴)设计出五轴联动式3D打印机。可以达到无支撑打印,提高打印速度,减少材料浪费的目的,为3D打印的高效化生产提供了新的发展方向。
关键词:五轴联动;无支撑打印;3D打印;变位机构
0 引言
3D打印(3Dprinting)被认为是“一项将要改变世界的技术”,第三次工业革命的重要标志。由于其在复杂三维结构、高深宽比结构和复合(多材料)材料结构制造方面具有很高的潜能和突出优势,而且还具有设备简单、成本低、效率高、可使用材料种类广、无需掩模或模具、直接成形的优点,经过三十多年的发展已经形成了FDM、SLS、SLA等形式3D打印机[2]。但是目前几乎所有3D打印机的运动形式均为X、Y、Z三轴联动,此三轴3D打印机的打印质量受打印过程中支撑结构的影响,存在支撑结构难以去除、产品表面质量不佳、打印时间长、材料利用率低,容错率低等问题,制约3D打印技术的发展。
本文针对上述问题,提出了基于三轴3D打印机运动原理方式的五轴联动式3D打印机。即在X轴、Y轴、Z轴的基础上新增了A轴(翻转轴)及B轴(旋转轴),使得被加工工件可在做三维运动同时实现绕轴旋转和不同工作面的转换,满足了在不同位向的加工面上打印的需求,实现无支撑打印。
1 工作原理
1.1 三轴3D打印机运动原理
三轴3D打印机是以空间直角坐标系为基础,通过三个方向丝杠配以驱动电机,构建起X、Y、Z三个互相垂直的运动方向,分别将喷头、打印平台等放置在不同的轴上以完成打印。如图1所示,打印平台固定在X轴上,在X轴电机驱动下沿X轴方向运动;打印喷头与Y轴固定,Y轴再与Z轴固定,在Y、Z轴电机驱动下打印喷头可以完成Y—Z平面的二维运动,辅以打印平台的X轴向运动即可完成打印工作。
1.2 五轴联动式3D打印机运动原理
本文所述的五轴联动式3D打印机是在三轴3D打印机运动原理基础上结合自动焊变位机工作原理设计而成,变位机的翻转机构和旋转机构可以作为五轴3D打印机A轴(翻转轴)和B轴(旋转轴)的基础。
本文所述五轴3D打印机的运动原理就是将三轴3D打印机的X轴、Y轴、Z轴与变位机的A轴、B轴联动。当待打印制件中存在悬空结构时,利用A轴和B轴的翻转及旋转功能可以使打印平台偏转到适合喷头打印的角度,从而省去支撑。例如待打印工件为一空心圆柱且有上下底面,在X轴、Y轴、Z轴配合运动下可完成除上底面外其余部件的打印,此后打印平台可在A轴和B轴的带动下翻转一定角度,使得上底面材料的堆积方向由X轴方向或Y轴方向转变为Z轴方向,即可实现空心圆柱上底面的无支撑打印。
2 五轴联动式3D打印机的结构设计
2.1 五轴联动式3D打印机变位(A、B轴)结构设计
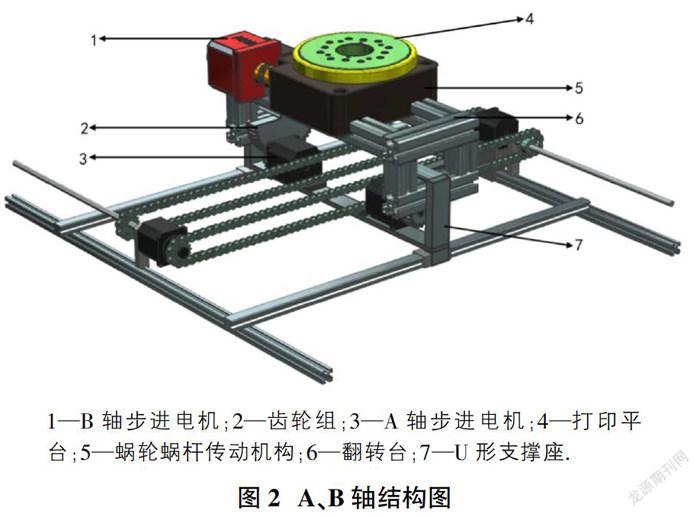
五轴联动式3D打印机设计难点在于打印物体如何实现自身的旋转与倾斜,为此本文结合了焊接变位机设计原理。A轴(翻转轴)可带动打印平台在X轴方向两侧来回摆动,B轴(旋转轴)可带动打印平台绕打印平台的法线方向旋转。故设计打印平台置于B轴上,由B轴带动其转动。B轴所在旋转台置于A轴摆动台之上,由A轴带动旋转台及其上面的打印平台完成摆动动作,如图2所示。
A轴采用步进电机配合齿轮传动的形式。摆动平台由Y轴上的U形支撑座支撑,支撑座两侧侧板装有轴承座与摆动平台两侧主轴配合,使摆动平台可自由绕摆动平台主轴旋转。摆动平台驱动力源于U形支撑座支撑两侧对称的步进电机,步进电机带动小齿轮与半圆形齿轮啮合,半圆形齿轮与摆动平台固定在一起,通过调节电动机转动轴的转角的控制摆动角度。
B轴采用步进电机配合蜗杆的传动形式。由步进电机控制蜗轮蜗杆机构的行程,涡轮与打印平台相配合,带动平臺旋转。
2.2 五轴联动式3D打印机结构设计
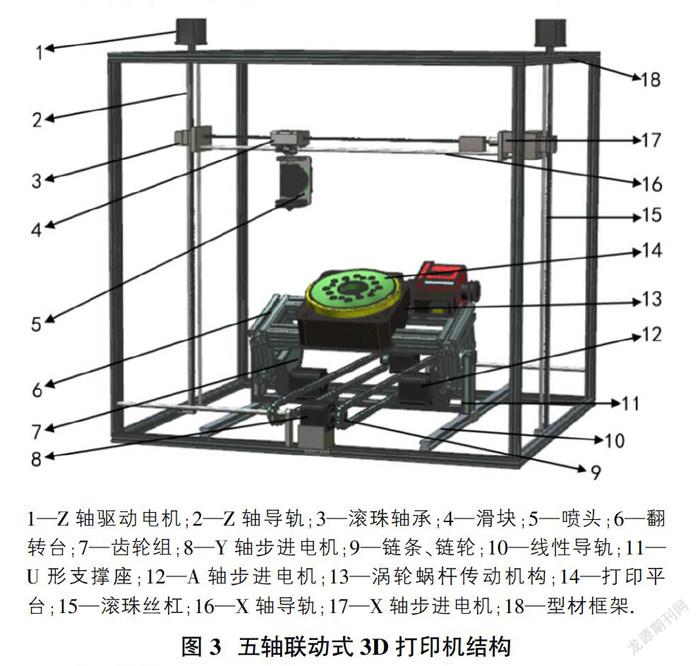
本文所述的五轴3D打印机秉承模块化设计理念,总体结构可以分为五个模块,分别是X轴模块、Y轴模块、Z轴模块、A(翻转)轴模块、B(旋转)轴模块。
X轴模块负责左右方向移动,由滑动平台、挤出头、步进电机、散热片、风扇、加热头等部件组成;Y轴负责前后方向移动,采用精密链条、链轮、步进电机、线性滑轨等组成;Z轴带动X轴上下的移动,由滚珠丝杠、光杠、步进电机构成;A轴负责X轴方向左右两侧的摆动,主要由步进电机、翻转台以及两组传动比为3:10的精密齿轮组成,通过控制步进电机的步数实现齿轮组的转动角度,从而控制工作平台翻转;B轴负责绕打印平台法线方向旋转,由步进电机、涡轮蜗杆传机构、打印平台等部件构成。
3 结语
本文阐述了一种基于三轴3D打印机运动原理和自动焊变位机工作原理的五轴联动式3D打印的机械结构。通过X轴、Y轴、Z轴与A轴、B轴联动,可以实现悬空部件的无支撑打印,具有打印质量高、打印速度快、材料利用率高等优点,为3D打印机的高效打印提供了新的发展思路。
参考文献:
[1]胡义华,蒋桂平,张政泼,赖显渺.基于桁架式的自动焊接装置结构设计的研究[J].轻工科技,2015,31(12):54-55.
[2]吴卫国,汪建晓,魏翱翔,李肖溪.一种多色3D打印机的设计与分析[J].制造技术与机床,2019(08):17-21.
[3]李小军,兰明霞.基于CAXA制造工程师五轴加工应用[J].内燃机与配件,2019(24):85-87.
猜你喜欢
老年博览·上半月(2021年3期)2021-03-30
红领巾·探索(2020年2期)2020-05-19
读者·校园版(2020年10期)2020-05-19
电脑爱好者(2020年1期)2020-04-28
电脑报(2019年10期)2019-09-10
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
航空模型(2016年1期)2016-03-01
股市动态分析(2015年24期)2015-09-10
中学生数理化·高二版(2008年4期)2008-11-12