一种改进的浮动车地图匹配算法
2020-09-10 01:53丁闪闪刁含楼
交通科技与管理 2020年4期
丁闪闪 刁含楼



摘 要:为提高浮动车地图匹配精度,提出一种改进的浮动车地图匹配算法,综合利用道路拓扑关系和车辆定位误差,缩小候选路段范围,采用基于距离与方向的要素加权方法确定最终匹配点,减少正确匹配路段被剔除的概率。依托南京市局部路网以及浮动车定位数据进行实例分析,结果表明,该方法具有较好的精度和实时性。
关键词:浮动车;地图匹配;道路拓扑;要素加权
中图分类号:P228.4 文献标识码:A
0 引言
随着智能交通系统的应用发展,安装车载定位设备的车辆越来越多,浮动车数据采集技术开始广泛应用于城市路况信息获取、道路建设和出行规划上[1]。地图匹配是浮动车技术的重要组成部分,由于路网环境、电子地图误差和定位设备误差的影响,浮动车采集的定位点会随机分布在道路两侧一定宽度范围内,只有将这些定位点修正到其行驶的道路上,才能开展相关应用。
目前,国内外学者研究的地图匹配算法主要包括几何匹配算法、概率统计匹配算法、相关性匹配算法、基于要素加权的匹配算法、模式识别匹配算法等[2]。其中,基于要素加权的地图匹配算法具有逻辑简单、速度快、实时性好等优点,得到较为广泛的应用。邹珍提出一种改进的基于权重的地图匹配算法[3],将权重模型与交通规则约束、最短路径算法相结合。曾嘉郦等提出一种出租车地图匹配算法[4],基于定位点到路段的距离、以及车辆行驶方向与道路方向的夹角确定候选路段,根据距离和方向的综合权重进行轨迹点匹配。在对以往的研究进行分析后发现,充分利用道路拓扑和多个要素可以进一步提高浮动车地图匹配精度。
本文从这一角度出发,综合利用道路拓扑关系和车辆定位误差,缩小候选路段范围,然后采用基于距离与方向的要素加权方法确定最终的匹配点,以期能够提高浮动车地图匹配精度,并确保匹配的实时性。
1 理论基础
1.1 基于网格法的误差区域初步确定
在算法设计时,默认车辆总是行驶在道路上,由此可知误差区域以一定的范围包含着车辆的实际位置,通过确定误差区域,可以排除大量不相关的路段,减少算法的复杂度。
本文采用网格法确定误差区域,在栅格地图基础上建立网格,利用折半查找法快速寻找出浮动车轨迹点所在的候选区域。由于定位接收机接收到的数据误差95%都在20 m以内,而数据投射到电子地图上的误差为15 m左右。综合考虑,取每个网格的边长为40 m。
根据浮动车定位点的经纬度数据,可以确定定位点在哪个网格块,选取定位点所在网格及其周边的8个网格作为误差区域。
1.2 基于道路拓扑的误差区域缩小
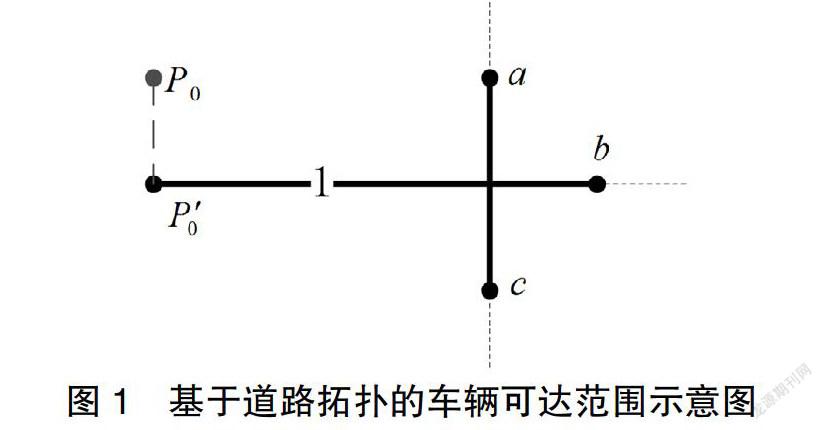
在电子地图中,道路拓扑关系是指节点与弧段之间的相互关系,在道路联通的情况下,一定时间范围内,由于车辆的行驶速度有限,因此存在着一个最远能够到达的距离。如图1所示,假设此时车辆行驶在道路1上,当前匹配点确定为,则由于行驶速度的限制,下一时刻,车辆最远只能到达、或点,即下一匹配点的位置只能存在于图中黑色实线部分的路段上。
传统的考虑道路拓扑关系的地图匹配算法中,通常是在确定误差区域后,将定位点向误差区域内的所有候选路段做投影,确定多个虚拟匹配点,然后将车辆无法到达的匹配点所在的路段去除,对剩余的虚拟匹配点,根据多要素计算综合匹配度,确定最终的匹配位置。如图2所示,为当前定位点,和为候选路段2和3上的虚拟匹配点,考虑道路拓扑关系后,认为点无法到达,因此将候选路段2去除,候选路段3成为最终的匹配路段,而成為最终的匹配点。但是从图中下一匹配点的位置可以判断,为错误匹配点。
针对以上可能出现的错误匹配情况,本文做了一定程度改进,在采用网格法确定候选路段后,并不急于将定位点向各路段进行投影,而是先根据前一匹配点的位置和道路拓扑性,另外确定一个匹配点可能存在的误差区域。将该误差区域与网格法确定的误差区域叠加,得到最终误差区域。将最终误差区域内路段上的每一个点均作为虚拟匹配点,以避免图2将路段2整条去除、造成错误匹配的情况。
1.3 基于要素加权的最终匹配点确定
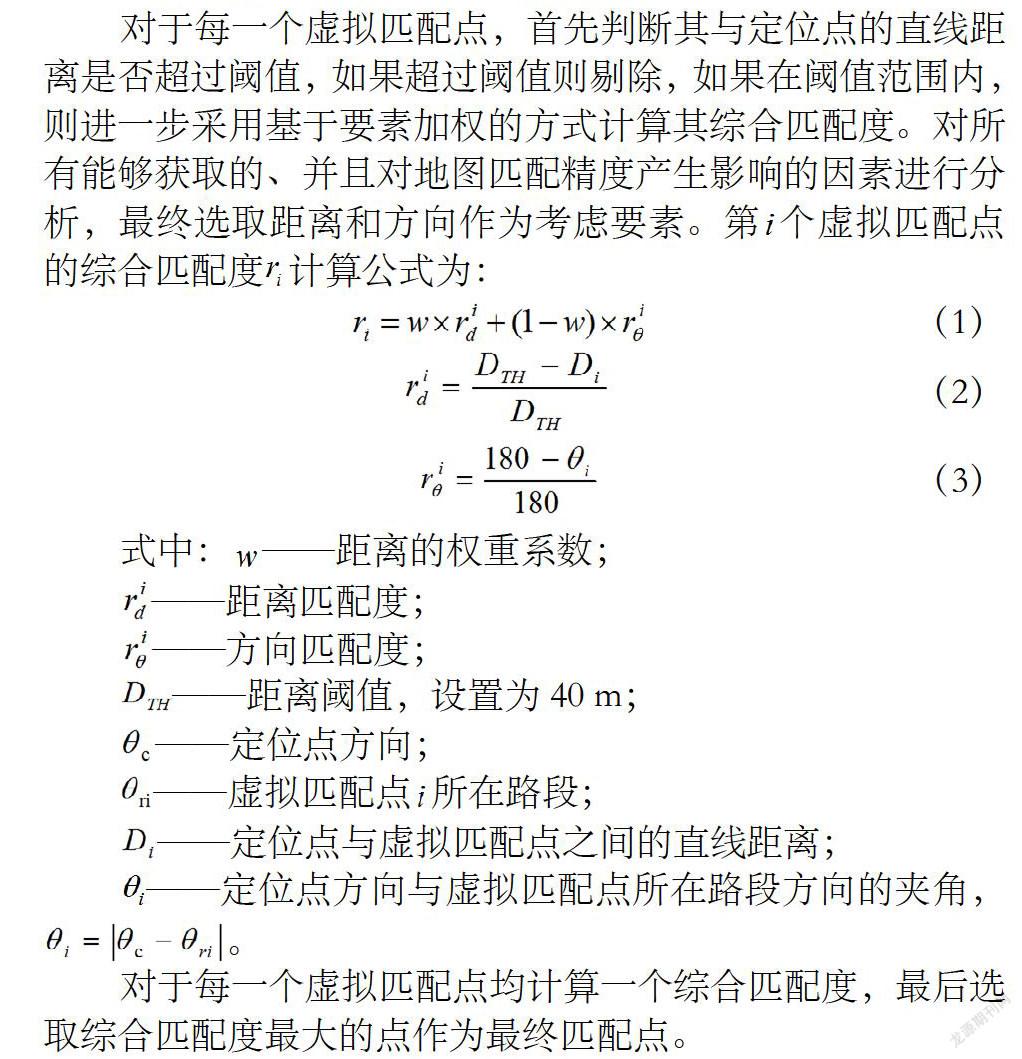
对于每一个虚拟匹配点,首先判断其与定位点的直线距离是否超过阈值,如果超过阈值则剔除,如果在阈值范围内,则进一步采用基于要素加权的方式计算其综合匹配度。对所有能够获取的、并且对地图匹配精度产生影响的因素进行分析,最终选取距离和方向作为考虑要素。第个虚拟匹配点的综合匹配度计算公式为:
式中:——距离的权重系数;
——距离匹配度;
——方向匹配度;
——距离阈值,设置为40 m;
——定位点方向;
——虚拟匹配点所在路段;
——定位点与虚拟匹配点之间的直线距离;
——定位点方向与虚拟匹配点所在路段方向的夹角,。
对于每一个虚拟匹配点均计算一个综合匹配度,最后选取综合匹配度最大的点作为最终匹配点。
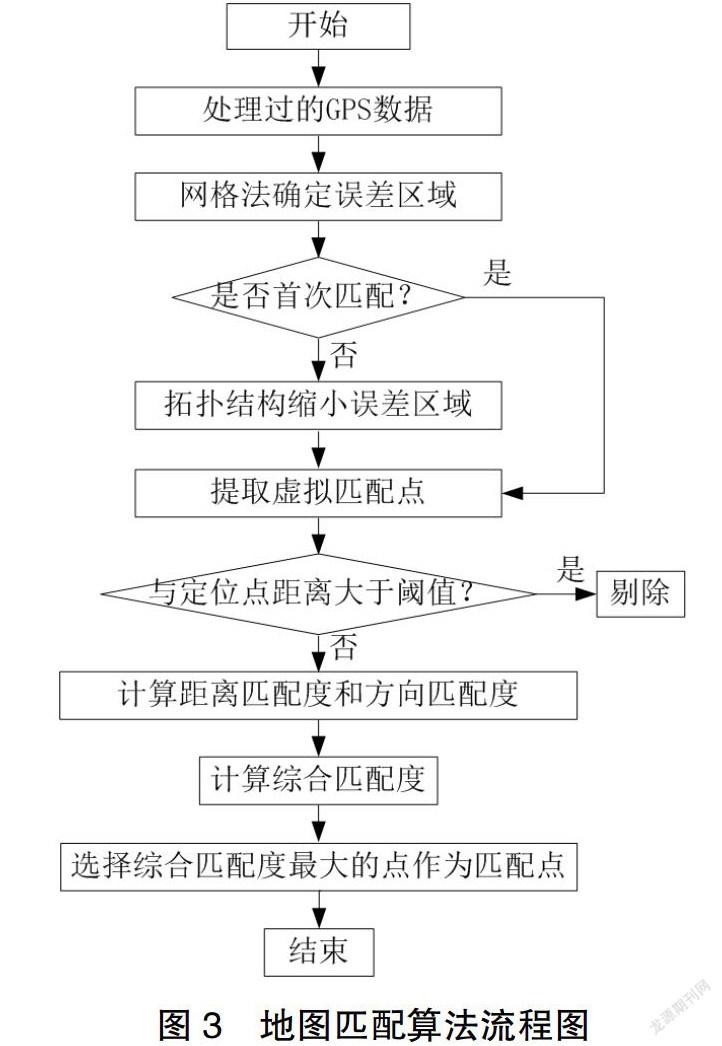
1.4 完整算法的流程图
2 实例分析
选取一小部分南京市城市路网作为研究对象,浮动车数据采样间隔为30 s,通过实现匹配过程,并将匹配路段分为普通路段和交叉口,结果如图4、5所示:
图中,“。”代表的是浮动车定位数据,“*”为浮动车地图匹配点。由图可知,普通路段共16个定位点,均准确匹配到道路上,匹配准确度100%,交叉口共7个定位点,其中6个准确匹配到道路上,匹配准确度85.7%。普通路段和交叉口的匹配时间分别为0.3 s和0.7 s,具有较好的响应速度。
3 结束语
本文提出一种改进的浮动车地图匹配算法,通过综合考虑要素加权与路网拓扑确定匹配路段,主要结论如下:
(1)基于网格法初步确定误差区域,提高了算法的运行效率,虽然网格范围较大,可能包含了与定位点距离超过阈值的点,但这些点可在后续步骤中快速判断和删除。
(2)对于存在前一匹配点的情况,根据道路拓扑关系缩小误差区域,同时完整保留匹配点可能存在的范围,减少了匹配到错误路段的概率。
(3)选取不同的权重系数会对结果产生不同影响,本文中采用了固定的权重系数,下一步将研究根据道路特征、车辆运行状态等动态调整权重系数,以期进一步提高算法精度。
参考文献:
[1]丁闪闪,王维锋,季锦章,等.一种城市快速路主辅道的浮动车地图匹配方法[P].中国发明专利,ZL201510259876.2,2015-05-20.
[2]孙棣华,张星霞,张志良.地图匹配技术及其在智能交通系统中的应用[J].计算机工程与应用,2005,42(20):225-228.
[3]邹珍.基于GPS的浮动车数据与实地图匹配的算法研究[D].武汉理工大学,2013.
[4]曾嘉郦,孙立双,王晓明.北京出租车GPS轨迹数据地图匹配算法研究[J].北京测绘,2019,33(03):255-260.
猜你喜欢
小资CHIC!ELEGANCE(2018年34期)2018-11-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
智族GQ(2018年1期)2018-05-14
现代职业教育·高职高专(2017年11期)2017-10-19
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
金点子生意(2016年7期)2016-04-09
海峡科学(2013年3期)2013-10-21