基于RoboDK的机器人搬运工作站的建立与仿真
2020-09-10 21:23卿笛
内燃机与配件 2020年17期
关键词:工业机器人
卿笛

摘要:随着科技的发展,工业机器人已广泛应用在搬运、激光切割、装配等领域,本文主要利用仿真软件RoboDK,设计工业机器人复杂搬运的仿真工作站,完成机器人工作站的离线编程和仿真,对搬运机器人在工业自动化生产线中提高生产效率提供理论依据。
关键词:工业机器人;RoboDK;离线编程;搬运工作站
0 引言
在工业机器人应用中,ABB工业机器人在搬运应用方面有诸多案例,在医药、食品、机械制造、化工等领域均有广泛的应用。采用机器人搬运可以大幅度节省劳动力成本、提高定位精度、降低搬运过程中的产品损坏率、提高生产效率。
1 RoboDK离线编程与仿真
随着机器人行业的发展,国内也推出了具有自主知识产权的通用型离线编程软件,RoboDK是江苏汇博公司推出的自主品牌离线编程软件,是一个多平台的机器人离线编程软件,同时也是一款机器人手操器对机器人本体进行模拟操作的虚拟仿真软件。RoboDK支持ABB、KUKA、FANUC、安川等多种品牌机器人的离线仿真,RoboDK具有可扩展机器人关节的外部轴模型和不同品牌的机器人工具模型。它包含加载文件、开放的在线图书馆、保存的电台、添加一个参考框架、添加机器人目标、移动帧/对象/工具、移动框架,对象工具、转开/关的碰撞检查、碰撞映射设置、快速仿真、添加一个Python脚本(宏)、添加一个新的机器人程序、添加一个机器人运动、使站可分发各种文件等菜单项,让学生迅速掌握机器人的基本操作、机器人坐标系转换、机器人运动学、机器人的控制等基本操作知识。
RoboDK软件的主要功能:
①RoboDK的机器人模型库;
②离线编程;
③逼真的仿真效果;
④导入导出机器人程序;
⑤Python API;
⑥支持多平台;
⑦支持多品牌机器人。
2 创建机器人搬运工作站
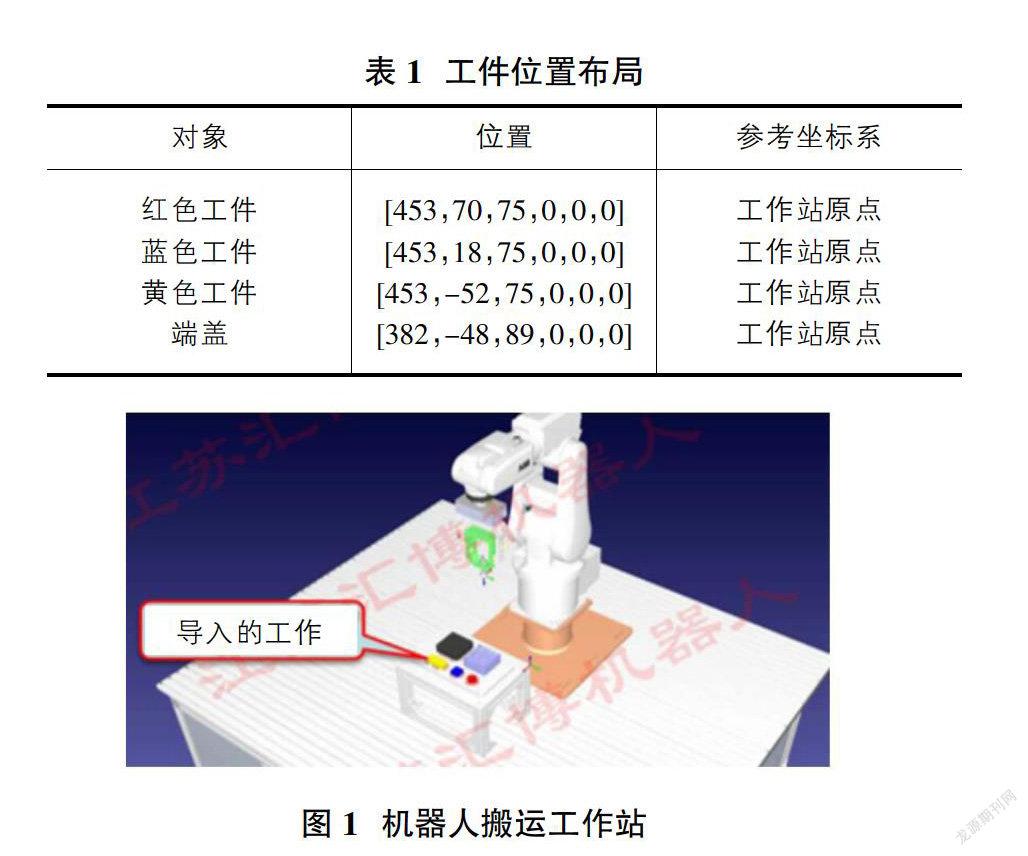
根据实际生产场景,在UG软件中建立基础模块,导入RoboDK软件中,导入工作站模型:工作台stp.和搬运模块stp.,根据机器人载荷、工作环境、安全防护等方面的具体要求,选定机器人的型号,本次项目任务使用的机器人为IRB120,导入机器人模型ABB-IRB-120-3-0-6.robot,并安装在机器人底座上,导入工具模型(吸盘工具stp.),导入在UG软件中建立的工件模块(红色工件、蓝色工件、黄色工件、端盖),并布局,布局位置如表1所示。创建完成机器人搬运工作站。(图 1)
3 搬运流程设计
整个搬运流程如图2和图3所示,先将红色工件从初始位置搬运至搬运位置,然后完成蓝色工件和黄色工件的搬运,最后将端盖盖上,即完成搬运流程。
在搬运之前先对基本信息进行设置:将机器人回到初始位置,设置为Phome点,新建Program程序,命名“红色工件搬运程序”,依次建立“蓝色工件搬运程序”、“黄色工件搬运程序”、“端盖工件搬运程序”,添加指令Simulation Event,同时选中四个工件,设置四个工件的初始位置-“替换物体”。添加设置工具与工件坐标系的指令,工件坐标系为机器人基坐标系,工具坐标系为吸盘工具。添加机器人速度指令,设置机器人搬运速度,线性速度设置为20,关节速度设置为20。
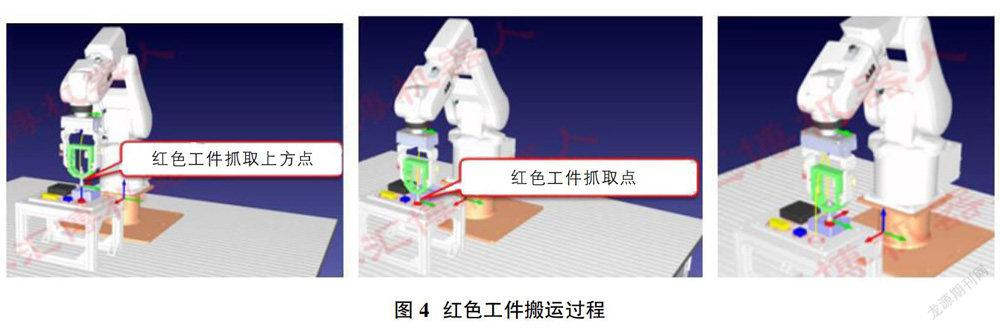
基础设置完成,进行搬运操作。示教红色工件抓取上方的目标点[153,-80,75,180,0,180],然后添加机器人移动到该点的指令,示教红色工件抓取目标点[153,-80,25,180,
0,180],然后添加机器人移动到该点的指令,当机器人工具吸盘到达红色工件抓取点时,双击添加指令“附加到吸盘工具”,执行该指令,机器人抓取工件,随后机器人返回抓取点上方,添加机器人移动到红色工件放置上方点[97,-87,95,180,0,180]和放置点[97,-87,45,180,0,180]的指令,双击添加指令“分离与吸盘工具”,执行该指令,机器人放置工件,机器人返回红色放置点上方点,至此完成红色工件的搬运过程。(图4)
按照这种方法,依次搬运蓝色、黄色、端盖工件。蓝色工件抓取上方点[153,-132,75,180,0,180],蓝色工件抓取点[153,-132,25,180,0,180],蓝色工件放置上方点[97,-118,95,180,0,180],蓝色工件放置点[97,-118,95,180,0,
180];黄色工件抓取上方点[153,-201.5,75,180,0,180],黄色工件抓取点[153,-201.5,25,180,0,180],黄色工件放置上方点[66,-101,95,180,0,180],黄色工件放置点[66,-101,
45,180,0,180];端盖工件抓取上方点[82,-198,89,180,0,
180],端盖工件抓取点[82,-198,39,180,0,180],端盖工件放置上方点[82,-102,113,180,0,180],端盖工件放置点[82,-102,63,180,0,180],参考坐标系都为搬运坐标系。
4 搬运程序示教
①偏移量OFF:抓取上方点是相对于抓取点的Z轴方向的偏移点,放置上方点是相对于放置点的上方Z轴方向偏移点,固可以采用偏移OFF功能完成,其他数据不变,Z轴沿正方形偏移50的量。
②配置轴参数。目标点路径验证完成后,需要对关节轴的参数进行配置,右击路径,选择下拉菜单“配置参数”下的“自动配置”,机器人会沿着创建的搬运的路径运动一个循环完成周参数的自动配置。完成配置,使得搬运过程中无机器人运动死点位置即可。
③指令添加。1)添加指令-运动指令。Move Joint Instruction(机器人关节运动指令Move J)和Move Linear Instruction(机器人直线运动指令Move L)。例如:搬运一个红色工件时,添加4个目标点,分别设置为红色工件的(预)抓取点和(预)放置点,添加指令“move joint”,关联至“red_pick_app”,添加指令“move linear”,关联至“red_pick”;2)指令添加-抓取动作。添加抓取工件动作指令:“simulation event”,选择“Attach object”;3)指令添加-等待。添加等待语句,等待0.2s指令:“pause”;4)指令添加-放置动作。添加释放工件动作指令:“simulation event”,选择“detach object”,选择放置位置。
④完成搬运-装配流程,最后利用Python编写仿真程序,生成机器人搬运装配程序。在该复杂搬运工作站中,采用循环语句,由于抓取上方点、抓取点、放置上方点,和放置点相的参考坐标系都是一样的,在利用Python进行编程的过程,利用偏移量,只需读取工件的抓取位置。
5 程序后处理
①轨迹可达性检测。右击Training,选择“Check path”,当出现“No problems found for this path”,即可说明可达性完成。
②运行程序,并进行碰撞检测。在单元格中双击,切换是否检测该项两物体间的碰撞,开启碰撞检测,如有碰撞,两个碰撞对象的颜色会变成深红色。
③生产离线程序。右击主程序,生成离线程序。在“RAPID”功能选项卡,单击“程序”,选择“新建模块”,创建MainMoudle模块,即可生成、创建搬运仿真离线程序。
④生产仿真视频。为了便于展示创建的工作站,RoboDK提供了仿真视频和仿真视图录制功能,为确保录制视频的质量,录制前可以设置屏幕录像的相关参数与保存路径。在“仿真”功能选项卡中,可生成仿真视频。
6 结束语
利用RoboDK离线编程方法,建立复杂的搬运仿真工作站,完成机器人工作站的离线编程和仿真,降低了重复性操作,充分体现了离线编程的优势,对搬运机器人在工业自动化生产线中提高生产效率提供理论依据。
参考文献:
[1]李慧.基于RoboDK的工业机器人搬运工作站仿真设计[J].自动化应用,2020(06):76-79.
[2]李慧.基于RoboDK的工业机器人搬运工作站设计与仿真[J].工程机械文摘,2020(04):6-9.
[3]白蕾,侯伟,张小洁.基于RobotStudio的机器人搬运工作站设计与仿真[J].国外电子测量技术,2018,37(06):114-118.
[4]唐静.基于Roboguide的搬运機器人离线编程与运动仿真[J].常州信息职业技术学院学报,2018,17(02):41-43.
[5]方伟.工业机器人离线编程与仿真软件开发[D].武汉:华中科技大学,2019.
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30
成才之路(2016年4期)2016-03-23