高压输电线路救援机器人结构设计与分析
2020-09-22 21:39顾晓阳
名城绘 2020年7期
顾晓阳
摘要:本文针对现有高压输电线路巡检机器人技术尚不成熟,及当巡检机器人在地线上出现故障时需人工上线拖回所存在的弊端,提出一种单档段救援作业机器人。设计了救援机器人的总体结构形式和各总成的具体结构,并对所设计的结构进行了三维建模仿真。
关键词:高压输电线;救援机器人;结构设计;分析
引言
随着高压输电线路巡检机器人技术的发展与应用,国内外电力系统越来越多的使用巡线机器人完成巡检任务。近年来,国内外的巡线机器人功能逐渐多样化,巡检设备逐步完善,机器人结构及控制方法日趋复杂。在机器人结构和控制方法复杂化的同时,伴随出现的一些故障也随之增加,如在巡检过程中可能出现的电池电量不足、温度过高导致工控机死机等,这些故障都可能引起巡检机器人滞停在巡检线路上。当机器人滞停在两塔之间的档段地线上时,目前国内外都是采用人工上线拖回机器人的方式处理这类问题的。但是人工上线操作危险性高,效率低下,劳动强度大,同时受到地理条件的限制,且多数情况需要停电操作,而高压输电线路停电不仅流程繁琐且会造成较大的电能损失。
1 救援机器人设计原理及作业规划
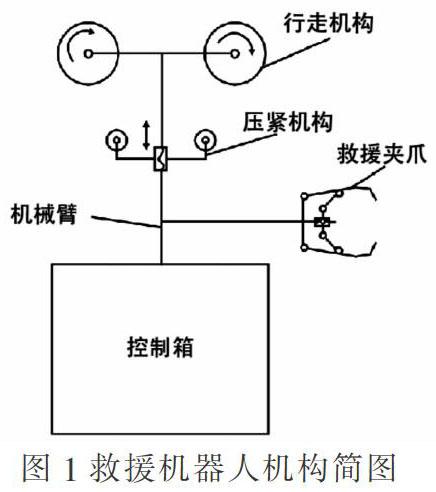
根据线路的结构,以及对作业任务的分解,救援机器人设计成单机械臂悬挂双滚轮式结构,且在两行走轮中间配一对压紧轮,以此达到护线和增加摩擦力的作用。由于穿/跨越机器人机械臂较长,且机械臂处空间较大,易于夹持,故选择救援机器人夹持穿/跨越机器人机械臂的救援形式。救援机器人整体设计机构简图,如图1 所示。行走机构提供机器人沿地线的移动(滚动),压紧机构提供护线所需的压紧运动,救援夹爪末端提供夹持被救援机器人所需的运动。
2 救援机器人机械结构
由图1知,救援机器人由行走机构、压紧机构、机械臂、救援夹爪及控制箱组成。其中控制箱由各种控制元器件和电池组成,安装在机械臂的下端。
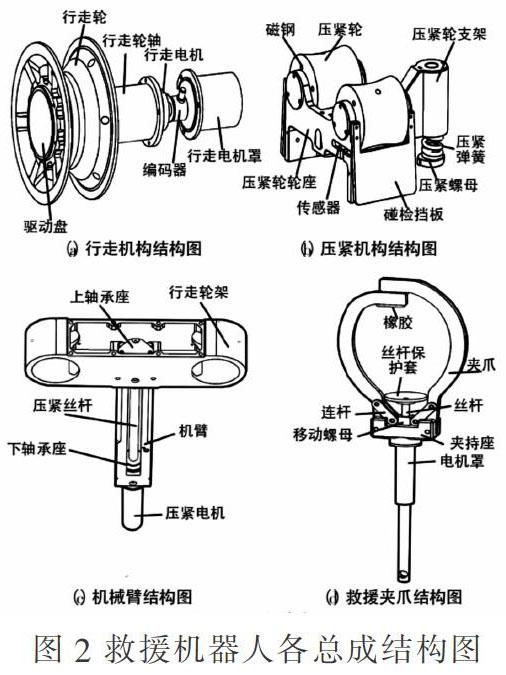
(1)行走机构的结构设计,如图2(a)所示。行走机构由行走轮、行走轮轴、行走电机及减速器、编码器、行走电机罩、驅动盘、轴承等组成。行走电机与驱动盘相连,驱动盘带动行走轮转动,行走轮与行走轮轴之间装有轴承,实现机器人沿地线的滚动运动,其中编码器接在电机的后端,实现对机器人行驶路程的记录与反馈。其中,行走轮采用“V”型槽回转结构适应地线形状,当巡检机器人在地线上行驶时,行走轮将地线包覆。“V”型槽结构能使行走轮与地线接触面积增加,与压紧轮一起,将地线约束在结构中,使得机器人在行驶中过程具有高安全性。
(2)压紧机构的结构设计,如图2(b)所示。压紧机构由压紧轮、压紧轮支架、压紧轮轮座、压紧弹簧、压紧螺母、碰检挡板、磁钢、霍尔传感器等组成。压紧机构通过丝杆螺母与机械臂连接,压紧轮支架一端与压紧螺母相连,一端套入压紧轮轮座孔内,并可使压紧轮轮座绕压紧轮支架轴线左右摆动,以适应不同倾斜角的导线。压紧轮采用尼龙66 材料制作,使压紧轮耐磨、耐热,且电绝缘性好。在压紧轮的断面均布四个磁钢,压紧轮每旋转一周,安装在压紧轮轮座上的传感器就会检测到四个信号,由此可以计算压紧轮转速和行走距离。碰检挡板通过两弹簧与压紧轮轮座侧面柔性连接,并且挡板上装有磁钢,对应压紧轮轮座上固定有霍尔传感器。当机器人行走遇到防振锤等障碍物碰到碰检挡板时,碰检挡板受压力与压紧轮轮座贴紧时,传感器传出信号,从而告知前方有障碍物,此时电机驱动压紧丝杆转动从而带动压紧螺母及压紧机构向下移动,以避开障碍物前行。
(3)机械臂的结构设计,如图2(c)所示。机械臂总成由行走轮架、上下轴承座、压紧丝杆、机臂、压紧电机、轴承等组成。压紧丝杆通过轴承和上下轴承座与机臂相连,压紧机构的压紧螺母与压紧丝杆螺纹连接,两行走机构通过行走轮轴与行走轮架相连,机械臂总成连接了行走机构、压紧机构、救援夹爪机构和控制箱,并使它们相互配合与协调。根据地线上的路况,压紧电机带动压紧丝杆转动,从而通过压紧螺母带动压紧机构上下移动,以调整姿态适应不同的路况。
(4)救援夹爪机构的结构设计,如图2(d)所示。救援夹爪机构由电机、电机罩夹持座、移动螺母、连杆、丝杆、丝杆保护套、夹爪和橡胶等组成。电机罩与夹持座固定在救援机器人机械臂上,电机罩内的电机转动带动丝杆转动,从而带动移动螺母沿丝杆轴向方向的移动,通过连杆实现夹爪的开合。夹爪终端装有橡胶材料,防止夹爪磨损被救援机器人的机械臂。丝杆末端装有塑料材料的丝杆保护套,防止丝杆直接与被救援机器人的机械臂接触,保护了丝杆与穿越机器人的机械臂。
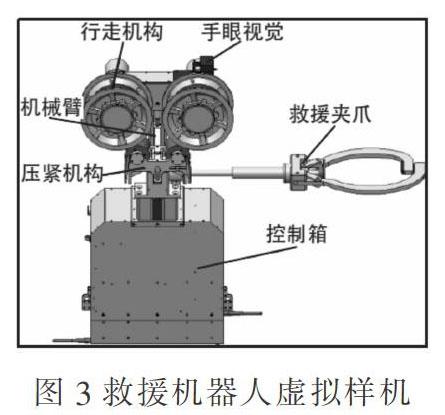
采用Solidworks 三维建模软件对救援机器人各总成进行实体建模并完成装配,其虚拟样机,如图3 所示。
3 试验运行
根据以上设计开发出样机。穿越机器人在对杭州市某松长甲线上巡检时,出现了一次故障,停滞在一档段内,使用救援机器人将其拖回。由于救援机器人的结构设计紧凑,故其重量也较轻,只需一个工人背动其攀爬至杆塔上,并将其挂在底线上即可,操作简单方便且需作业的人数很少。
救援机器人在救援过程中,机器视觉效果良好,碰检系统判断准确,控制系统控制机器人各运动流畅且高效。机器视觉、碰检系统及控制系统的良好配合使救援夹爪与穿越机器人对接精准,拖动穿越机器人行驶平稳,并成功将其安全拖回至杆塔处。避免了高压输电线路停电及人工上线操作,既节约了电能也保障了工人的人身安全。
参考文献:
[1]无配重欠驱动输电线路巡检机器人研究与试验[J]. 张利霞,杨志成,张景胜.机械设计与研究.2017(03).
[2]输电线路检修作业风险及安全监督管理分析[J]. 周耀湘.中国高新技术企业.2016(33).
[3]可全程越障架空输电线巡线机器人设计[J]. 刘国平,孙茂文,缪航,秦科技,俞振东.工程设计学报.2016(05).
(作者单位:杭州市电力设计院有限公司)
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
科学与财富(2021年36期)2021-05-10
科学与财富(2021年36期)2021-05-10
孩子(2020年12期)2020-01-06
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
作文评点报·低幼版(2018年17期)2018-07-12
神州·上旬刊(2017年9期)2017-10-15
财经理论与实践(2014年1期)2014-04-02