线控转向系统前轮主动转向控制策略研究
2020-09-26 09:43杜明志孙跃东
汽车实用技术 2020年17期
杜明志 孙跃东

摘 要:文章的研究目的是实现线控转向系统前轮主动转向以改善车辆的行驶状态。文章首先对转向执行模块进行动力学分析,并设计出基于前馈控制的理想传动比;其次,结合理想传动比和状态反馈,建立前馈-反馈联合控制系统,以获得最优的前轮转角;最后,联合Carsim中的车辆模型进行仿真试验,并选取方向盘转角阶跃输入作为试验工况。结果表明,文章所采用的联合控制策略可实时调整前轮转角,有效地改善了车輛的行驶状态,为线控转向系统的研究提供了一定的参考价值。
关键词:线控主动转向;理想传动比;前馈控制;反馈控制
中图分类号:U463. 44+4 文献标识码:A 文章编号:1671-7988(2020)17-38-06
Study on front wheel active steering control strategy of SBW
Du Mingzhi, Sun Yuedong
( College of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093 )
Abstract: The purpose of this paper is to realize the front wheel active steering of the SBW to improve the working state of the vehicle. Firstly, the dynamic analysis of the steering execution module is carried out, and an ideal transmission ratio based on feedforward control is designed. Secondly, combined with the ideal transmission ratio and state feedback, a feedforward - feedback joint control system is established to obtain the optimal front wheel Angle. Finally, the vehicle model in Carsim is combined for simulation test, and the steering wheel Angle step input is selected as the test condition. The results show that the joint control strategy adopted in this paper can adjust the front wheel Angle in time and effectively improve the running state of the vehicle, and this provides a certain reference value for the research of the SBW.
Keywords: Active steering by wire; Ideal transmission ratio; Feedforward control; Feedback control
CLC NO.: U463. 44+4 Document Code: A Article ID: 1671-7988(2020)17-38-06
前言
在智能驾驶热潮的影响下,线控转向系统(SBW,steering-by-wire)也得到了较多的关注与研究。线控转向系统可实现路径跟踪及规避障碍和危险,它所采用的线控技术来源于飞机驾驶中的“包线控制”。但现阶段线控转向系统仍作为辅助助力转向系统,由驾驶员操控转向盘,目前该系统已装载与英菲尼迪Q50。线控转向系统的显著特征是用ECU控制器代替了转向操纵模块与转向执行模块之间的机械部分[1]。本文重点对线控转向系统前轮主动转向进行分析研究,设计出基于状态跟踪的反馈控制策略,以实时地修正车轮转角,改善车辆的行驶状态。
于蕾艳、施国标等人[2]重点研究了线控转向系统变传动比特性和主动转向功能,以横摆角速度和侧向加速度增益不变为控制基础以获得前轮修正转角,实现实时地对转向轮转动角度进行修正,有效地改善车辆的行驶状态。文献[3]利用遗传算法理论对变传动比特性进行了研究。文献[4]采用模糊控制理论对变传动比特性进行了分析。文献[5][6][7]针对线控主动转向进行了分析,提出基于状态变量的反馈控制策略,实现主动性修正前轮转角,结果表明所采用的控制策略较好地改善了车辆的行驶状态。
1 转向执行模块动力学及仿真模型的构建
1.1 线控转向系统概况
SBW主要由转向操纵和转向执行模块以及主控制单元组成。其结构如图1所示。
转向操纵模块主要包括:方向盘、路感电机及其相应组件、减速器等以及相应传感器。
转向执行模块主要包括:转向电机、电机控制器、转向器等以及相应传感器。
主控单元即电子控制器可以视为线控转向系统的的大脑、中央处理器等。它可以接受到由转向操纵总成和转向执行总成传递过来的信号,并根据其内部的控制算法对采集的信号进行分析和处理。
工作原理:首先主控单元接收到转角传感器和转矩传感器捕获信号值,根据其内部控制算法将该值转化成需要的输出值,即输出指令,并将该指令传递给转向执行电机控制器驱动电机进行工作;转向电机输出的电磁力矩经过减速机构传递给转向器,再通过转向主销实现车轮转向,这是从上层到下层的工作过程;其次,主控单元获取车速传感器及车轮转角传感器的值,根据车速和转角等信号计算回正力矩,并将回正力矩转化成输出指令传递给路感电机,路感电机产生相应的转矩以来模拟路感,给予驾驶员更好的驾驶体验,这是由下层到上层的工作流程。
1.2 转向执行模块动力学模型
1.2.1 转向执行模块动力学分析
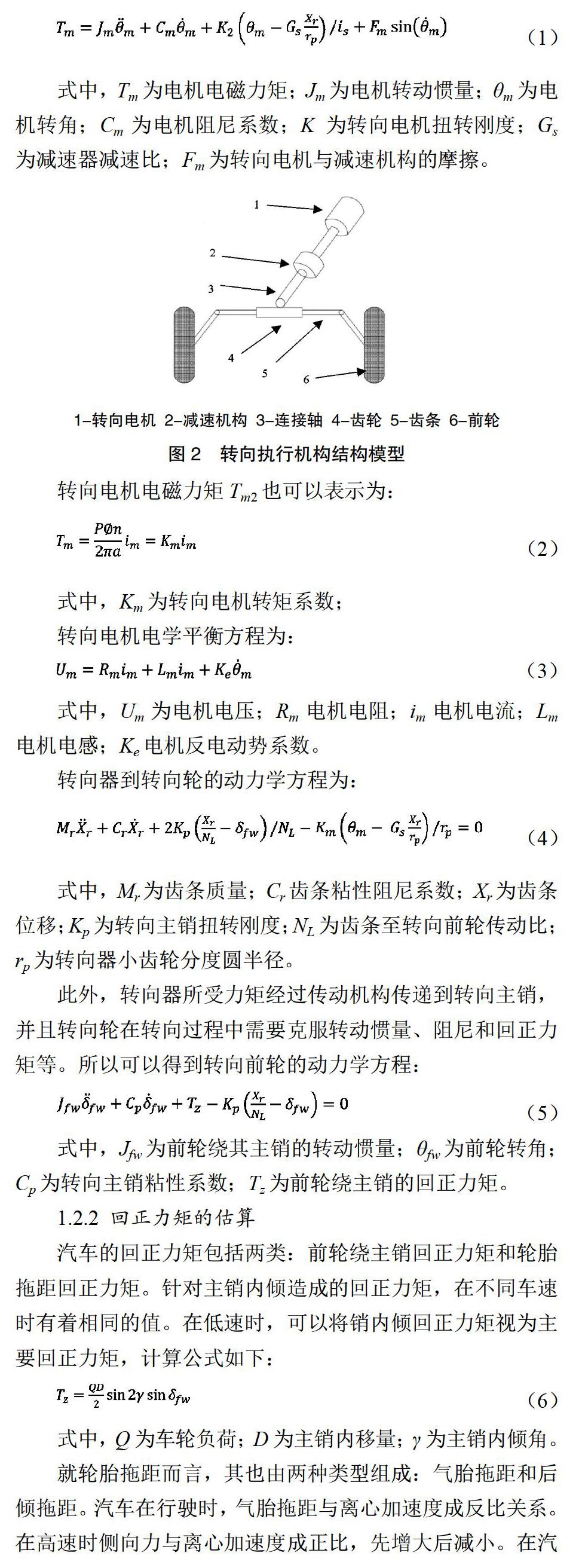
在转向执行模块中,转向电机通过减速器与将力矩传递给转向器齿轮齿条,再通过传动装置与前轮相连。所以在分析建转向执行模块的受力情况和数学模型时,应考虑的模块有电机、转向器、传动装置和前轮等。
电机本身存在着转动惯量和阻尼,并且电机轴也会受到扭转。所以動力学方程为:
(1)
式中,Tm为电机电磁力矩;Jm为电机转动惯量;θm为电机转角;Cm为电机阻尼系数;K为转向电机扭转刚度;Gs为减速器减速比;Fm为转向电机与减速机构的摩擦。
转向电机电磁力矩Tm2也可以表示为:
(2)
式中,Km为转向电机转矩系数;
转向电机电学平衡方程为:
(3)
式中,Um为电机电压;Rm电机电阻;im电机电流;Lm电机电感;Ke电机反电动势系数。
转向器到转向轮的动力学方程为:
(4)
式中,Mr为齿条质量;Cr齿条粘性阻尼系数;Xr为齿条位移;Kp为转向主销扭转刚度;NL为齿条至转向前轮传动比; rp为转向器小齿轮分度圆半径。
此外,转向器所受力矩经过传动机构传递到转向主销,并且转向轮在转向过程中需要克服转动惯量、阻尼和回正力矩等。所以可以得到转向前轮的动力学方程:
(5)
式中,Jfw为前轮绕其主销的转动惯量;θfw为前轮转角;Cp为转向主销粘性系数;Tz为前轮绕主销的回正力矩。
1.2.2 回正力矩的估算
汽车的回正力矩包括两类:前轮绕主销回正力矩和轮胎拖距回正力矩。针对主销内倾造成的回正力矩,在不同车速时有着相同的值。在低速时,可以将销内倾回正力矩视为主要回正力矩,计算公式如下:
(6)
式中,Q为车轮负荷;D为主销内移量;γ为主销内倾角。
就轮胎拖距而言,其也由两种类型组成:气胎拖距和后倾拖距。汽车在行驶时,气胎拖距与离心加速度成反比关系。在高速时侧向力与离心加速度成正比,先增大后减小。在汽车正常行驶的条件下,假设轮胎拖距为常量。
(7)
式中,Mz为由轮胎拖距回正力矩;Fy为侧向力;ξ1为气胎拖距;ξ2为后倾拖距。
Fy近似于离心加速度成正比,有 ,式中:m为质量;u为车速;R为转弯半径;l为轴距;lr为质心到后轴的距离。转弯半径公式为:
(8)
式中,lf为质心到前轮的距离;Cr为后轮侧偏刚度;Cf为前轮侧偏刚度。可得由轮胎拖距产生的回正力矩表达公式为:
(9)
所以可以得到汽车的回正力矩为:
(10)
1.3 转向执行模块仿真模型
根据对线控转向系统转向执行模块的动力学分析,在Matlab/Simulink环境中搭建其仿真模型,模型图3所示。
2 前轮主动转向控制策略研究
2.1 前轮转角控制策略分析
线控转向系统可以根据车速的变化获得此时的理想传动比,进而获得理想的前轮转角,该方法可以称为基于理想传动比的前馈控制。这种方法应用在汽车处于稳态工况下具有较好的控制效果。但在实际的驾驶过程中,汽车也会遇到非稳定工况,所以单单依靠基于理想传动比的前馈控制策略并不能满足汽车运行的多种工况,在此引入基于状态跟踪的反馈控制算法。具体的控制流程图如下图所示。
根据图4可知,结合理想传动比和状态跟踪反馈实现对车轮转角的联合控制,以反馈值与理想值的差值作为反馈控制系统的输入,期望的前轮修正转角作为输出,目标前轮转角再加上修正转角就可获得最优的前轮转角。
2.2 前轮主动转向控制策略设计
2.2.1 理想传动比下的前馈控制算法
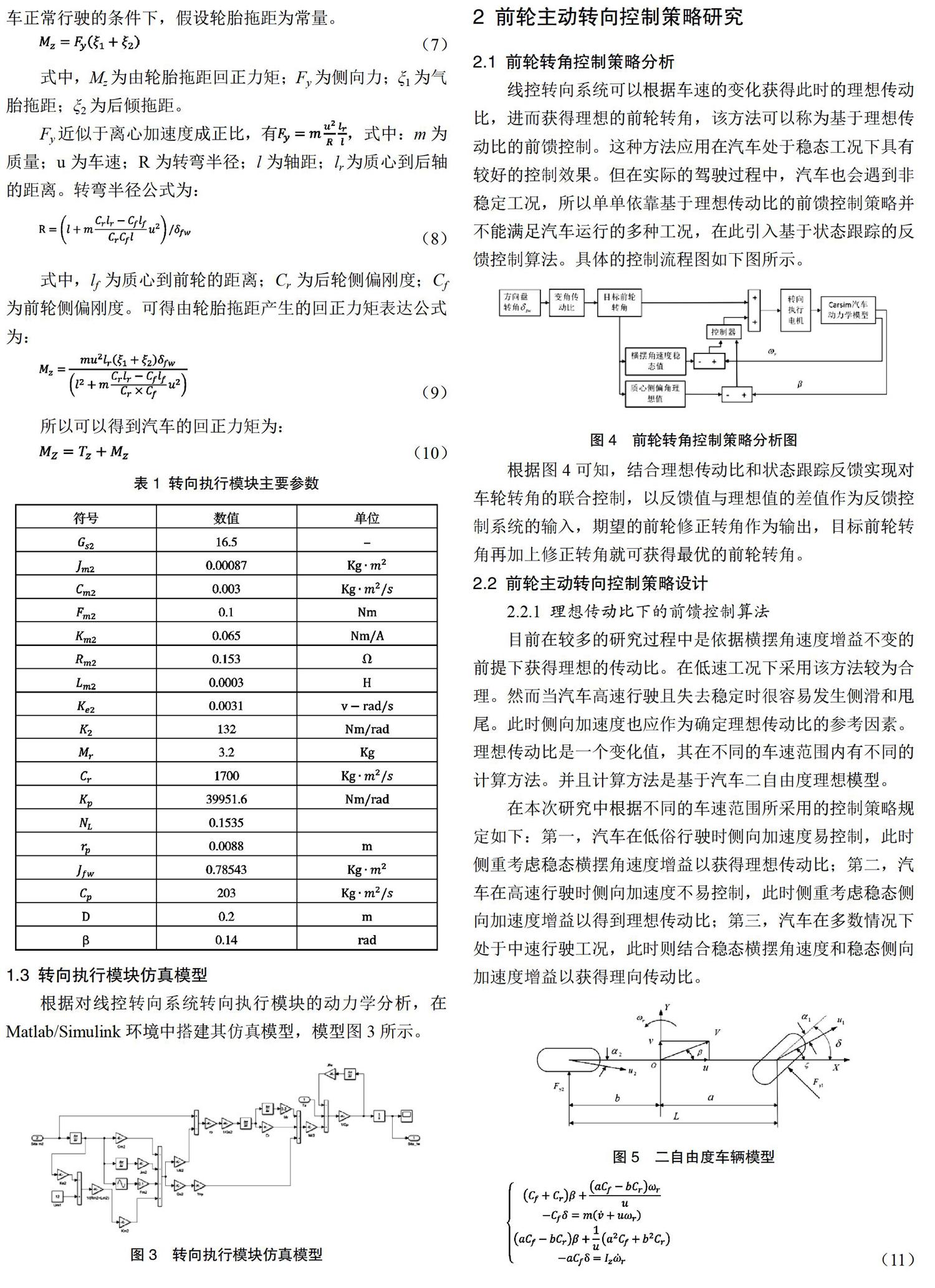
目前在较多的研究过程中是依据横摆角速度增益不变的前提下获得理想的传动比。在低速工况下采用该方法较为合理。然而当汽车高速行驶且失去稳定时很容易发生侧滑和甩尾。此时侧向加速度也应作为确定理想传动比的参考因素。理想传动比是一个变化值,其在不同的车速范围内有不同的计算方法。并且计算方法是基于汽车二自由度理想模型。
在本次研究中根据不同的车速范围所采用的控制策略规定如下:第一,汽车在低俗行驶时侧向加速度易控制,此时侧重考虑稳态横摆角速度增益以获得理想传动比;第二,汽车在高速行驶时侧向加速度不易控制,此时侧重考虑稳态侧向加速度增益以得到理想传动比;第三,汽车在多数情况下处于中速行驶工况,此时则结合稳态横摆角速度和稳态侧向加速度增益以获得理向传动比。
(11)
上式中:u为车辆沿X轴方向的速度;v为车辆沿Y轴方向的速度;ωr为横摆角速度;Mz为车辆的合力力矩;a、b为车辆的质心到前后轴的距离;δ为车辆的前轮转角; Cf、Cr为车辆的前后轮侧偏刚度;β车辆的质心侧偏角;ξ为u1与X轴的夹角;m为整车质量;Iz为车辆的横摆转动惯量;
根据二自由度理想模型,可得:
(12)
由式(11)可得:
(13)
当汽车处于稳态行驶时,其侧向加速度可略等于:
(14)
由式(13)、(14)可得基于车轮转角的侧向加速度增益表达公式为:
(15)
所以当汽车属于稳态工况时,可得横摆角速度和侧向加速度的增益值表达式为:
(16)
通常情况下,汽车转向系统的传动比定义为:
(17)
将式(16)带入式(15)中可得:
(18)
结合两个参数稳态增益的角传动比,可以得到理想的角传动比表达式为:
(19)
式中,Kx、Ky为比例系数,其值可以根据驾驶工况或者驾驶员的习惯来选定。在此,选定Kx=0.6,Ky=0.4。本次研究中选定iωr为0.22s-1,iay为4.12s-2。计算得到K=0.0022s2?m2,理想传动比的表达式如式(20)所示。
角传动比应设置最小限定值和最大限定值。最小限定值是為了消除汽车在较低车速行驶时车轮对于方向盘转动较于敏感的问题;而最大限定值则是为了避免汽车在较高速行驶时反应迟速的现象。经查阅文献,选定角传动比最小限定值为8,最大限定值为20。此外应对车速进行合理的划分,具体划分规则如表2所示。
(20)
2.2.2 LQR状态反馈补偿控制算法
由于汽车是一个非线性系统,单单依靠前馈控制并不能较好地对车辆进行控制,所以在此引入基于状态反馈补偿控制的最优控制算法。最优控制目标有两个:其一,横摆角速度稳态值应跟踪二自由度理性模型的值;其二,为了汽车能跟踪行驶轨迹,期望质心侧偏角应为0。据此建立理想状态向量表达式为:
(21)
式中,ωre为理想横摆角速度,δre是基于变角传动比获得前轮转角,Kre定义为稳态横摆角速度增益值,其表达式为:
(22)
根据二自由度模型可得横摆角速度达到的最大参考值为:
(23)
所以可得到期望横摆角速度修正值为:
(24)
实际与理想的状态向量的误差为:
(25)
评价指标表达式为:
(26)
式中,δ*是由LQR控制器输出的前轮修正转角。
LQR最优控制算法可在Matlab中直接调用,通过LQR函数可以得到状态反馈矩阵K,进而使得评价指标函数J获得最小值,所以前轮转角的最优调整值为:
(27)
所以最优前轮转角表达式为:
(28)
相应的转向执行电机最优转角表达式为:
(29)
计算出转向执行电机的最优转角之后,根据电机电学平衡方程:
(30)
式中,电机额定电压为12V。根据电压和电机转角可以求的电机电流,进而获得转向执行电机的最优输出的电磁力矩,控制前轮转动。
3 Matalb/Carsim联合试验仿真
在本次试验研究过程中,结合Carsim软件和Simulink来验证基于前馈和反馈联合控制的效果。Carsim软件侧重仿真车辆的操纵稳定性,其中“sim”即代表Simulation,意为仿真模拟。Carsim是MSC公司旗下的一款仿真软件,可实现软件及硬件的在环仿真试验,功能较为强大,不仅采用详细的物理模型来模拟高速公路车辆及其控制器的动态行为,还可以通过GUI界面访问车辆、道路、测试条件等,并且支持视频动画。此次研究选取B型底盘整车模型,除转向系统外,其他系统均采用默认设定的数值。
在Carsim软件中只配置了传统转向系统,并没有配置线控转向系统,可设置OPT_DRIVER_ACTION=0禁用其中的转向模块,将搭建的SBW模型嵌入到Carsim软件中。在仿真过程中设定输入到Carsim中的参数为车轮转角,输出到Simulink中的参数为横摆角速度、质心侧偏角和车速。
选择典型的极限工况,来验证采用的联合控制策略的控制效果。设置水平路面附着系数0.5,车速为80KM/h,方向盘转角输入为阶跃信号,大小为0.785rad,即45度,方向盘转角输入如图7所示。
从图8分析可得,当车辆以高速进入转弯状态时,前轮修正转角较大,主要原因是刚进入转弯时质心侧偏角的反馈权重更大,导致车轮转角会适当的减小以调整车辆的侧倾。随着输入转角的稳定,车轮修正转角也趋于一定值。
如图9所示,基于前馈-反馈联合控制所得的横摆角速度变化相对稳定,波动范围小,并且更加接近于理想值。
如图10所示,在采用基于理想传动比和状态反馈跟踪的联合控制策略下,由线控主动转向与Carsim联合仿真模型所得的质心侧偏角稳态值得到了较好的改善,变化曲线较为平稳,最终稳态值也更加接近于理想值。
4 总结
本文主要对线控转向系统前轮转角控制策略进行了研究与分析,设计出不同车速下的理想传动比以获得期望的前轮转角;采用状态反馈的控制策略,设计出LQR最优控制器以获得前轮修正转角,实现主动调整转向车轮的转动角度,进一步改善车辆的行驶状态;建立联合仿真模型,并进行仿真分析,结果表明,基于状态反馈的联合控制策略能够较好地跟踪和改善车辆的行驶状态,验证了控制策略的可行性。
参考文献
[1] 朱华.汽车线控转向系统[J].汽车电子,2011,(08):80-82.
[2] 于蕾艳,林逸,施国标.线控转向系统控制策略的研究[J].计算机仿真,2008年6月,P248-251.
[3] 于蕾艳,林逸,施国标.遗传算法优化线控转向系统角传动比的研究[J].计算机仿真,2008,25(8):268-270.
[4] 时间.基于虚拟样机技术的线控转向研究[D].西安:长安大学, 2008.
[5] 陈小兵.汽车线控转向主动转向控制策略与路感模拟研究[D].武汉科技大学,2013.
[6] 李东.汽车线控转向系统路感模拟控制策略研究[D].吉林大学,2011.
[7] 郑宏宇.汽车线控转向路感模拟与主动转向控制策略研究[D].吉林大学,2009.
[8] 何新毅.线控转向系统主动转向与路感控制策略研究[D].南昌大学,2017.
[9] 陈小兵.汽车线控转向主动转向控制策略与路感模拟研究[D].武汉科技大学,2013.
[10] 苏延霞.线控转向中路感控制系统设计及算法分析[D].武汉理工大学,2013.
[11] 王宁.线控转向汽车路感模拟及主动转向控制策略研究[D].辽宁工业大学,2016.
[12] 王冠一.线控转向汽车变传动比和主动转向控制研究[D].辽宁工业大学,2015.
[13] 李壮.轮边电驱动系统转向控制方法研究[D].哈尔滨工业大学,2012.
[14] 唐绍丰.基于模糊自适应PID控制的汽车线控转向系统研究[D].山东理工大学,2011.
[15] 欧阳海.线控转向系统控制算法研究[D].武汉理工大学,2010.
[16] 胡茹飞.汽车线控转向系统双向控制方法研究[D].吉林大学, 2012.