中级轿车E型多连杆后悬架结构解析及特性分析
2020-10-09 10:19卓书亮
汽车世界·车辆工程技术(上) 2020年5期
关键词:结构分析
卓书亮

摘 要:本文主要通过对E型多连杆后悬架的结构分析,基于ADAMS/Car模块,建立E型多连杆后悬架参数化模型,通过仿真研究E型多连杆后悬架结构参数与车轮定位参数、轮距等影响关系,利用 ADAMS/Insight建立E型多连杆后悬架优化模型,并进行悬架参数优化设计。
关键词:E型多连杆;后悬架;结构分析;几何定义;ADAMS
0 前言
E型多连杆后悬架是近几年来迅速发展起来的一种悬架结构,与非独立悬架相比,能同时兼顾更好的乘坐舒适性和操纵稳定性。
1 结构特征
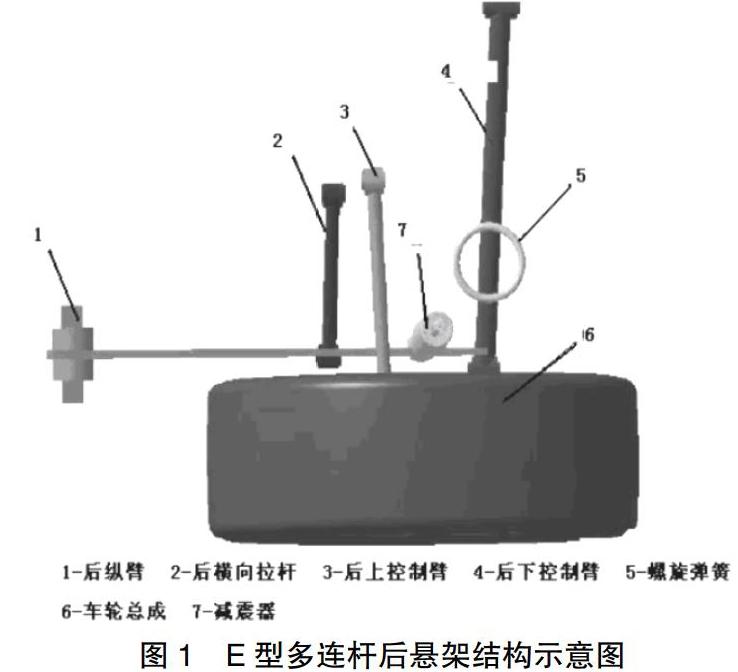
如图1所见,后纵臂、后横向拉杆、后上控制臂和后下控制臂形成“E”布置,故命名为E型多连杆后悬架。
2 功能分析
2.1 前束角控制
前束控制臂和下控制臂等长的情况,当车轮上下跳动时,运动轨迹是半径相同的圆弧,所以车轮在正常的平衡位置下设定的前束不会改变。前束控制臂和下控制臂不等长,当车轮上下跳动,运动轨迹是半径不同的圆弧,假设前束控制连杆较短,则无论车轮如何跳动,前束都会比平衡位置時增加。
2.2 外倾角控制
对于独立悬架而言,合理的车轮外倾变化是必要的,对于该E型多连杆悬架因后纵臂衬套的扭转刚度较大,外倾自由度无法全部通过衬套的扭转变形来提供,为此该臂设计成片状冲压结构,中间部位设计成状,并设有开口和角线,从而给车轮提供适当的外倾自由度。
2.3 侧倾稳定性
2.3.1 后纵臂对侧倾转向的影响
后纵臂是影响侧倾转向的重要因素,若铰链点在前,且该点的位置比车轮中心高,则侧倾后外轮后移,内轮前移。若铰链点比前轮中心低,则相反。
2.3.2 各横向控制臂对侧倾转向的影响
(1)几何特性转向。因后横向拉杆和后下控制臂非等长,非平行配置,通过运动分析发现,车轮上下跳时在后纵臂的影响下均趋于前束变化。
(2)侧向力转向(随动转向)。当后下控制臂的布置位置距离车轮中心较近,当车辆曲线运动时地面对轮胎产生侧向反作用力F,传递到后横向拉杆和后下控制臂上的力记作F1、F2,通过力矩平衡原理可得F1和F2。
当车辆转弯时,在地面侧向力的作用下,外侧车轮趋于前张,内侧车轮趋于前束。
2.4 纵向顺从性(退化性)
2.4.1 纵向缓冲
车辆在道路上行驶时,会遇到凸起和凹坑而受到纵向冲击力,设计时积极利用衬套挠曲变形的前后运动,即“纵向顺从性”,从而可以起到降低悬架的前后刚性的目的。E型多连杆悬架纵向柔性的设计要点:
(1)衬套X方向在满足纵向柔性要求的同时,不可过于柔软,否则,当汽车加速或制动时,车轮在纵向力的作用下因位移过大而发生摆动,从而影响操纵稳定性。(2)衬套X方向通过合理的腰型孔设计用来保证所需要的斜率呈递增变化的静弹性特性。(3)拖臂衬套在Z方向上会承受一定的垂直载荷。同时为了能够有效地传递横向稳定杆产生的力,在Fz方向上的弹性特性几乎是线性的。
2.4.2 纵向力柔性转向和几何特性转向
采用前束角变化来提高操纵稳定性的方法,称之为悬架的“车轮前束控制机能”,引起前束角变化的现象称之为“柔性转向效应”,可分为纵向力柔性转向和横向力柔性转向。
(1)纵向柔性转向和几何特性转向。对该研究对象,在纵向力的作用下,由于后下控制臂的退让性,车轮将向后方移动。这时因后横向拉杆比后下控制臂设计的较短,从几何学上讲,在纵向力作用下车轮将向前束方向回转。
(2)横向连杆和后下控制臂的柔性转向。当纵向力进入后,前后力作用于纵拖臂,根据力矩的平衡,横向连杆承受拉力,后下控制臂承受压缩力,在各衬套的挠曲变形下,车轮将向负前束方向回转。
3 运动特性分析
3.1 运动学模型建立
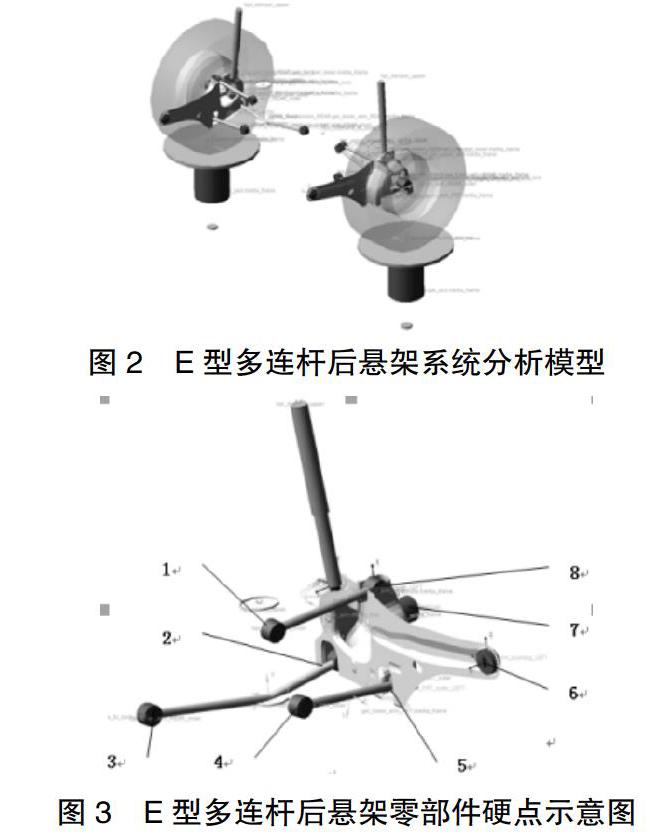
建立相应的ADAMS仿真分析模型,如图2。各零件连接关系如图3,硬点坐标如表1。
3.2 运动学特性分析
ADAMS中输入Vertical(Parallel)Mode,对于本文研究的车辆,取其跳动范围为常用的 -50~+50 mm,计算该E型多连杆式悬架的车轮外倾角、车轮前束、车轮轮距等的轮跳特性。
3.2.1 后轮前束角仿真
图4为车轮前束角随车轮跳动的变化曲线。在车轮跳动过程中,希望在车轮上跳时产生正的前束,下跳时产生负前束,这样可以使得后轴具有侧倾不足转向特性,有利于改善汽车操纵稳定性能。从图4中可以看出,在车轮跳动±50 mm的行程内,后轮前束角的变化范围为-0.26~0.76,变化趋势基本符合设计要求,但变化范围有些过大。
3.2.2 后轮外倾角仿真
通常设计中车轮都具有一定的外倾角,当车轮向上跳动时,外倾角一般向负值方向变化,而下跳时向正值方向变化,这样可以减小轮胎的磨损,提高汽车的操纵稳定性。一般车轮的后外倾角的变化不宜太大,其范围为-3°~3°,在车轮跳动±50 mm的行程内,外倾角变化量应尽量小于±1°。从图5中可以看出,后轮外倾角的变化范围为-2.33°~0.22°,基本符合设计要求,但变化量有些过大。
3.2.3 后轮轮距仿真
轮距变化从侧面反应了轮胎的磨损情况,轮距变化越大,轮胎磨损越严重,反之,则越小。从图6中看到在车轮上跳行程中,轮距变化从0增加到大约8 mm。而在下跳行程中,0减少到大约-13 mm,大于上跳行程。
3.3 参数优化
本文主要针对后轮前束角→后轮外倾角进行优化分析,此次优化以各后拉杆坐标和车身连接点坐标为设计变量,每个坐标值的变动范围为 - 10~10 mm之间,以车轮跳动过程中车轮外倾角、前束和车轮轮距变化量平均值最小为优化目标。
车轮前束角优化前后对比,如图7,优化后,前束角的变化量比之前大大的减小,这将对车辆直线行驶的稳定性有显著提高。
车轮外倾角优化前后对比,如图8,优化后,外倾角的变化量为-1.25°~-0.1°,更接近于-1.0°~1.0°设计范围。
车轮轮距优化前后对比,如图9,优化后的轮距变化量比优化前有所改善,轮距的变化范围从-13~8 mm变为-9~5 mm,在一定程度上减小了轮胎的磨损,延长了轮胎的使用寿命。
4 结论
通过建立E型多连杆悬架的运动学模型,分析了E型多连杆悬架的车轮定位参数、轮距随车轮跳动量的变化规律及其对车辆性能的影响,为今后的进一步分析提供了依据。同时对悬架结构参数进行优化并取得了明显的效果,符合独立悬架的设计要求,为提高悬架的性能提供了有力的帮助。但是,由于建模时没有考虑弹性元件的影响,会使结果精度略有降低。
参考文献:
[1]刘维信.汽车设计[M].北京:清华大学出版社,2001.
[2]余志生.汽车理论[M].北京:机械工业出版社,2000.
[3]马自达汽车株式会社.后悬架装置:中国,专利申请号.200610126235.0[P].2006.
[4]赵广辉.汽车转向运动特性与悬架系统的关系[C].北京,2008:3-10.
猜你喜欢
智富时代(2016年12期)2016-12-01
智富时代(2016年12期)2016-12-01
戏剧之家(2016年10期)2016-06-18
科技视界(2016年13期)2016-06-13
现代经济信息(2016年6期)2016-05-31
商(2016年9期)2016-04-15
科技视界(2016年5期)2016-02-22
人民论坛(2016年3期)2016-01-22
化学教学(2015年9期)2015-11-09