
浅析三维点云数据的预处理过程
2020-10-09 02:09王杏王正伟王丹
科教导刊·电子版 2020年20期
王杏 王正伟 王丹

摘 要 随着三维激光扫描技术的快速发展,使得获取的三维点云数据的精度和规模越来越大,从而提高了对海量点云数据的存储、编辑、预处理、特征的提取等相关技术的要求。但由于野外扫描环境的限制,使得获取的点云数据不可避免地会产生像树木、车辆等的噪声和冗余数据。所以在实际的研究过程中,需要先对获取的点云数据进行预处理之后,才能得到我们工程拟研究的对象,继而才可对它作进一步的有限元分析。本文简要介绍三维激光扫描数据处理流程及点云数据的配准和拼接、去噪和精简、修复等预处理过程。
关键词 三维 点云数据 处理
中图分类号:TP391.41文献标识码:A
1三维激光扫描数据处理流程
三维激光扫描数据处理的主要过程包括:制定计划、外业数据采集、内业数据处理三部分。首先需要制定可行和详细的工作计划,做好相应的准备。根据扫描对象和精度不同的要求,确定合适的扫描站点和路线,根据研究的对象和目的,选取合适的采样密度、扫描仪距扫描实体的距离、设站数等等。外业数据采集的主要任务是采集点云数据、分析数据是否符合要求、进行初步的质量分析等几个部分。内业数据处理在点云数据处理中是很关键的,也是工作量比較大的环节。主要包括显示外业采集的原始数据、对点云数据进行规则网格化、配准、去噪、压缩、建模、图形图像处理等。
2外业数据采集
不同的专业领域可根据自己的需求,采用不同的三维数据获取方法、扫描仪器及相应的数据处理软件和技术。例如在可视化地理信息系统中,获取三维点云数据的方法主要通过户外测量、摄影测量或从地形图中进行采集;在医学研究中,通过一系列的二维图像获取人体器官的三维点云模型,这些二维图像主要有计算机断层扫描CT、核磁共振MRT图像等。本文研究主要是应用于建立工程结构有限元分析中的有限元模型,故选取户外测量模式,仪器选用Optech公司ILRIS-3D仪器。
2.1扫描过程
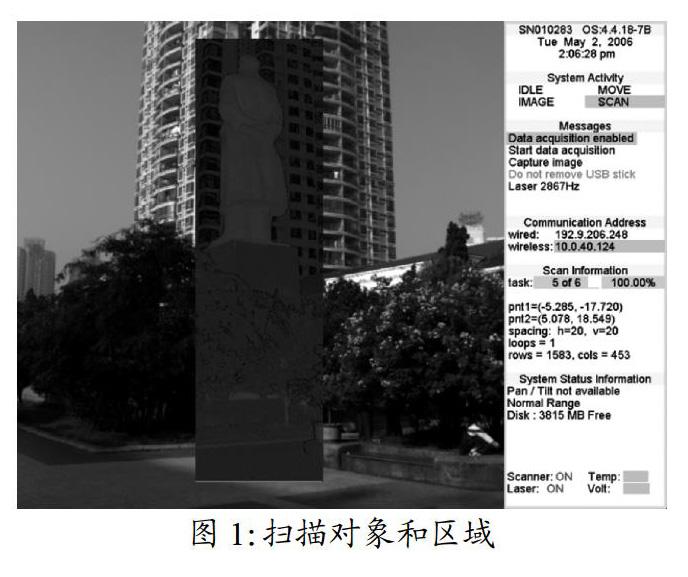
本文研究的对象是位于贵州省贵阳市云岩区贵州师范大学宝山校区的毛主席像座基下的石墩。由于毛主席像旁边都是建筑物,空地不是很大,所以按照现场的实际情况,确定每站距离目标物体的距离为25m左右,扫描分辨率确定为1/8(每360吧?000个点),扫描点距为10mm,共设三个站。其中,第一个站扫描了一次,第二个站和第三个站扫描了两次,扫描对象和区域如图1所示。
3内业数据处理过程及结果
3.1 点云数据生成
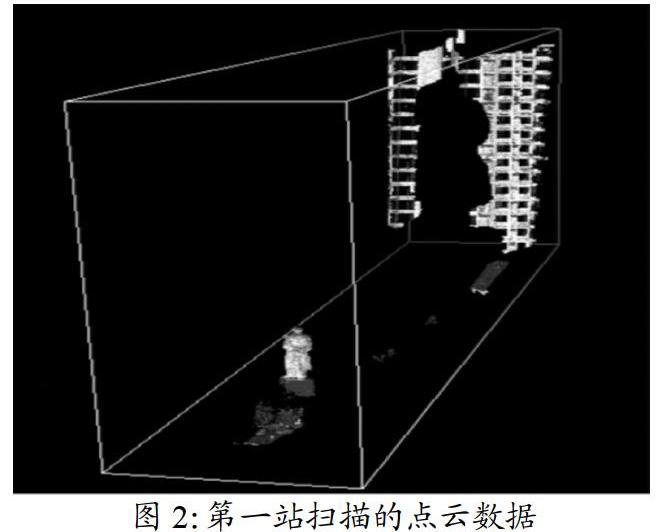
将三维激光扫描点云数据导入PolyWorks软件,生成点云数据的原始模型。其中第一站的原始点云数据如图2所示:
3.2点云去噪和粗简
户外测量采集到的点云中往往会有树木或错误点,我们将它们统称为噪声点。这些噪声点一般是由于设备标定的参数或外界环境的改变造成的,由含有噪声的点云数据重构出来的模型可能会严重偏离实际物体,影响到检测质量,所以需要通过去噪及平滑滤波等方法进行处理。对于规则的点云数据,通常可使用标准高斯算法、平均或中值滤波算法进行处理,其中高斯滤波能较好的保持原数据的外形,中值滤波能较好的消除冗余数据。
在三维激光扫描的过程中,大量无关点也扫入其中,这大大增加了点的数量。为了减少数据的运算量,利用PolyWorks软件将毛主席像周边的树木、建筑物、电线等冗余噪声去除,只留下目标物体—毛主席像及其座基下石墩的扫描数据,得到相对较少的点云数据。结果如图3所示。
3.3点云配准
由于受到扫描设备和环境的限制,往往不能一次扫描到完整的点云模型,总需要经过多站测量,才能得到物体表面完整的点云数据。所以扫描完毕之后,首先要做的就是对这些多站扫描得到的局部点云数据进行配准和拼接。
点云配准方法是将不同站点和方向测得的点云数据,通过坐标转换到同一坐标系下,获取整体的点云模型。通常情况下是通过一定的算法或者数学规律,选取多视点云之间公共部分的点,从而得到几片点云自动配准的结果。现目前的配准算法主要有迭代最近点算法(Iterative Closest Point,ICP)、基于曲面的配准算法和基于集合的特征配准算法。本节利用PolyWorks软件将前面5次扫描得到的点云数据(如图4),进行点云数据配准与拼接,得到的结果如图5所示。
3.4点云精简
当经过粗减后的点云数量还是十分巨大的时候,就有必要通过精简过滤来去除冗余点,这样不但可以减小存储空间,还可以降低后期处理点云的时间。点云精简的比例要在其误差范围内,否则会丢掉特征信息,特别是尖角、棱线和曲率变化大的区域。当点云类型为散乱点云数据时,可使用随机采样、均匀网格等方法实现简化的目的;而扫描线与多边形点云数据则应选用等间距缩减、倍率缩减等方法;网格点云数据应使用分布密度法与最小包围区域法等方法进行简化。
由于本文研究的是毛主席石像座基下的石墩,故还需进行点云数据精简,将毛主席石像删掉,删掉之后的结果如图6所示。
3.5修复模型
基本处理好的表面模型建立以后,由于扫描过程中,受到遮挡物的影响,致使模型的部分区域精度不高甚至缺失,需将精简后的模型修复完整。修复后的点云模型如图7所示:
4结束语
本文介绍了三维激光扫描仪的数据处理过程,主要包括制定计划、外业数据采集和内业数据处理,本文最终获取的石墩点云模型是利用polyworks软件直接进行预处理,为下一步研究特征提取算法奠定了基础,提供研究对象。
参考文献
[1] 刘阳阳.三维点云数据预处和分割算法的研究[D].西安:西安工程大学,2019.
[2] 俞浩.基于点云数据的预处理算法研究[D].合肥:合肥工业大学,2019.
[3] 楚如丽.基于三维点云数据的目标识别研究与实现[D].上海:上海师范大学,2019.
猜你喜欢
科技创新与应用(2017年3期)2017-02-18
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
