手术机器人性能评价方法的探讨
2020-10-12 01:31孟祥峰张超唐桥虹王浩王晨希李佳戈
中国医疗设备 2020年9期
孟祥峰,张超,唐桥虹,王浩,王晨希,李佳戈
中国食品药品检定研究院 光机电室,北京100050
引言
近年来,作为一个国家科技发展和高端制造业水平的重要标志,机器人特别是医用机器人产业发展受到了世界各国的高度关注。医用机器人在微创手术、骨科手术、患者疾病监控及护理、远程医疗、智能康复等领域展现了巨大的潜力[1-10]。机器人技术在医学领域的应用,对患者而言,使其住院时间缩短,并发症和手术瘢痕减少;对外科医生而言,它允许在手术时采用坐姿进行操作,控制更多的器械或执行多项任务,减少劳动力成本,实现精确的定位和稳定的操作,增加了外科手术操作的灵活性。医用机器人目前主要有两种形式,一是主从式:由现场操作人员连续控制或远程连接,并搭配3D 显示技术,实时显示手术画面[11-12]。腹腔微创手术多采用主从遥控操作技术,如达芬奇外科系统;二是图像引导式:手术计划由机器人执行,通常由导航系统或其他跟踪方法引导[13-14]。骨科和神经外科手术系统多采用图像引导技术,医用机器人根据医学影像进行3D 建模和手术规划,预先定义手术工具的导引方位,为手术提供所有需要的数据,并通过虚拟空间与患者空间的配准和追踪,监控工具尖端的位置,精准定位,帮助医生完成实时监控和手术。图像引导式手术机器人一般包含机械臂系统、导航系统和控制系统三大部分,如图1 所示,控制系统完成手术的规划及各部分的控制,对手术过程实时显示,机械臂系统实现精确定位与动作,导航系统实现患者坐标系、机械臂坐标系、术前影像坐标系的统一与实时追踪补偿。
医用机器人是指采用机器人技术的医用电气设备/系统[15],对于电气安全和电磁兼容国内外出台了部分标准[16-19],然而对于医用机器人的性能尚未出台相关标准。目前对于医用机器人的性能评价多参照一般工业机器人,关注机械定位、位姿准确性等指标[20],限于机械臂、导航相机等部件级性能,不能完整表达整个系统的实际应用精度,性能验证的指导意义不够全面。根据医用机器人的临床应用流程,如何建立基于医用机器人系统的评价指标体系和评价方法,是亟需解决的问题。本文以图像引导式手术机器人为例,对医用机器人性能影响因素进行分析,通过实验设计,实现系统性能评价。
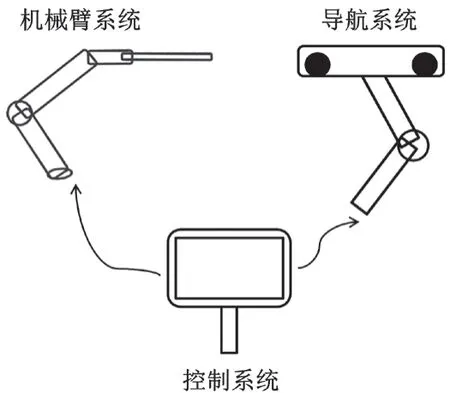
图1 图像引导式手术机器人组成示意图
1 实验设计
1.1 系统定位精度的评价
机械臂本身的定位准确度按照常规方法,即在有效工作空间内选定分布边长为300 mm 的立方体上8 个顶点和1个中间点:A、B、C、D、E、F、G、H、J,如图2 所示,从A 点出发,控制机械臂从A 点分别运动到B~J 点,每次运动完成,用三坐标测量仪测量器械末端坐标值,计算点A 与其他各点的距离XA[21],计算值与设定值的偏差为定位准确度。
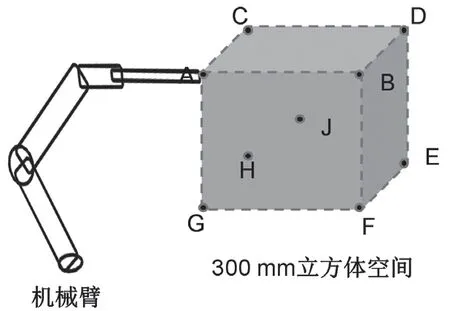
图2 机械臂定位准确度测量示意图
对于系统定位精度,通过对医用机器人的基本组成和工作方式进行分析,影响其系统定位精度的因素可归纳为四点:① 机械臂是定位实施的主体,其定位准确度会影响系统精度;② 导航系统追踪的准确性会影响系统精度,实际上导航的追踪能实时指示机械臂的当前坐标,一定程度上减小因机械臂本身定位不准对整体精度的影响;③ 机械臂末端器械安装的重复性也会影响系统精度,包括安装槽与器械的吻合程度、锁止装置的锁止力大小,这些都可能成为影响安装重复性的因素进而影响系统精度;④ 除硬件本身的性能外,软件算法的配准精度及医学影像本身的畸变、伪影等都会影响系统的整体精度。
如何纳入以上四点因素,并量化系统精度是本实验设计的难点。对于图像引导式手术机器人最常见应用为方向引导,如直线方向引导,本文将所引导的方向抽象为空间向量,通过比较空间两向量的夹角和模长实现系统定位精度的评价。
实验采用定位模体,模体结构如图3a 所示。通过规划模体上空间两点作为起点和终点(规划路径考量了机器人实际工作空间,其方位选择为临床代表性方位)。使用三坐标测量仪进行起点和终点位置探测,得到标称空间向量;进而控制机械臂使手术工具到达规划的起点和终点,对手术工具对应点进行测量,得到机器人实际到达的空间向量,如图3b 所示,比较二者的偏差。

图3 系统定位精度评价示意图
实际操作中,在软件中导入模体影像进行配准(纳入因素④),并进行手术规划,起点是圆柱顶端靶点的球心位置,终点是底部靶点的球心位置。进行视觉标记识别,通过导航相机获得模体和机械臂的相对位置关系(纳入因素②)。
使用空间坐标测量装置探测模体起点和终点位置,获得模体的起点位置坐标E(xE,yE,zE) 和终点坐标T(xT,yT,zT) 。
机械臂安装具有特殊标记点的手术工具(纳入因素③)到达规划起点和终点位置(纳入因素①),并用空间坐标测量装置获得器械末端的起点位置坐标和终点坐标
规划的轨迹方向向量见式(1)~(2):

距离偏差E 为规划轨迹向量长度E' T'与器械实际到达的轨迹向量ET长度的差值,见式(3):

角度偏差θi为规划轨迹路线向量方向与器械实际运动轨迹向量方向之间的夹角,见式(4):

1.2 系统延时的评价
对于图像引导式手术机器人,需要使用导航系统实时定位患者与机械臂之间的相对位置,导航系统的相机以一定刷新频率在不断地检测机械臂和患者身上标记点的位置,如果患者身上标记点的位置发生了移动,那么导航系统会指引机械臂做出相应动作进行补偿,保证手术的精度。由于在这个过程中需要进行探测、计算、反馈、补偿等动作,就会出现操作延时。这会直接影响医生的操作速度从而降低工作效率,增加操作失误的可能性,同时也会增加初期使用机器人医生的学习难度。
精准捕捉从位移—导航追踪-软件控制—器械运动全链条的运动延迟是实验设计的关键问题。运动的起点为模体,运动的终端为器械,二者的延时即为系统延时。为防止接触测量的震动对测试结果带来的影响,本文采用两个非接触式光学位移传感器,分别监测模体和机械臂的运动,并进行信号采集,如图4 所示。当使用稳定的驱动方式产生模体运动时,记录此时的位移传感器信号,同时经过导航系统的补偿机械臂运动,记录机械臂运动时的位移传感器信号,二者信号同步采集,计算二者信号的时间偏差,实现系统延时的评价如图5 所示。

图4 系统延时测试布置图

图5 系统延时信号采集
2 试验结果
2.1 系统定位误差
分别按照机械臂定位准确度的实验方法,以及本文设计的系统定位精度测量实验方法进行测量,机械臂定位准确度8 个距离最大偏差为0.8 mm。系统精度测量两空间向量ET与E′ T′如图6 所示。系统精度的长度偏差为0.12 mm,角度偏差为0.26°。
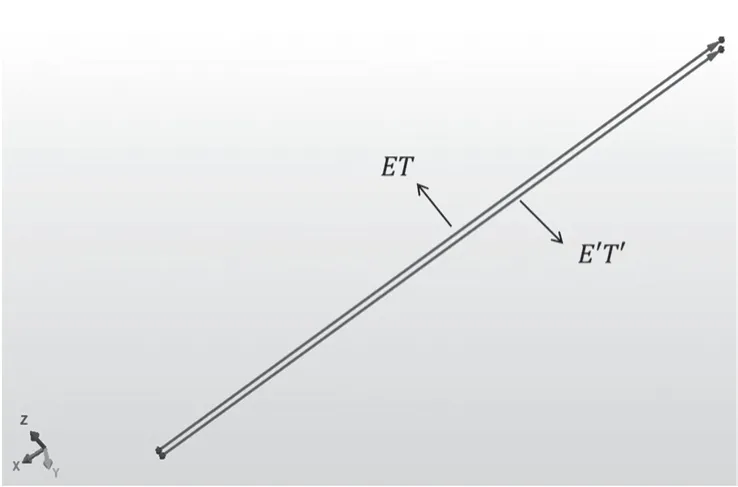
图6 系统精度测量三维向量
2.2 系统延时
瓣膜系统延时监测曲线如图7 所示。测量模体由静止到运动的情况下,从模体移动到机械臂移动的延时△t1;测量模体由运动到静止的情况下,从模体停止到机械臂停止的延时△t2;以移动距离偏差>0.1 mm 时作为启动开始时间,△t1 为301 ms,△t2 为287 ms。
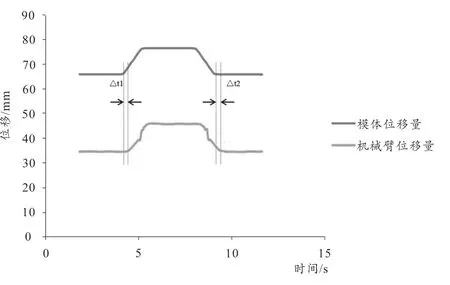
图7 系统延时位移量-时间曲线
3 讨论
在系统定位精度测量上,实验通过空间定位模体的测试,在设备正常工作范围内选择具有代表性的空间导引方向,通过起点、终点靶标点设计进行规划,模拟了临床方向引导规划应用的场景,同时将定位精度误差抽象为空间两向量相对位置的比较,达到系统精度评价的目的。该实验设计运用的模体可通过三维测量装置在检测前进行校准,便于实现测试工具的溯源。为了证明机械臂定位准确度并不能完全代表系统的定位精度,实验结果进行了系统精度的长度偏差与机械臂定位准确度的比较,二者存在差异,系统精度的长度偏差小于机械臂定位准确度。造成差异的原因分析为:① 实际规划长度要小于机械臂本身的运动空间大小,空间越大可能造成偏差增加;② 机械臂本身的偏差可能会被导航仪定位进行修正,机械臂定位准确与否不能直接证明系统精度的大小。机械臂虽是器械定位的实施主体,精度虽很重要,但不是唯一的影响因素。这也充分说明考量系统精度的必要性。
在系统延时测量上,考虑了整个系统的一个闭环反馈的系统延时时长,采用非接触式位移传感器,将光信号转换为电信号进行监测,避免了由于接触测量自身的抖动带来的非预期移动追踪带来的测量偏差。本文实验设计了从静止到动态和从动态到静止的两种不同运动状态下的延迟,二者大值为301 ms,相差14 ms,300 ms 的延迟明显会被人感知,带来一种滞后感,这是一个容易引起误操作的指标,应引起关注;两种不同运动状态下延时稍有差别,说明可能操作者对于设备的操作步骤,或者患者的固定方式对于延迟性能会带来一定影响,实验时应综合考虑各种不利情况。
4 结论
目前关于机器人的各种测量方法大多关注机械臂、导航系统等关键部件的性能,对于系统实际临床应用的性能考量还不够。本文分析了医用机器人的系统性能评价指标,并设计了评价方法,考量了由于各部件的综合因素造成的系统偏差,同时比较了机械臂与系统的定位精度,以及机器人不同运动状态下的延迟,结果说明评价方法可行,且系统性能是临床使用效果的客观表达,应重点考量。本文的实验方案也将为医用机器人性能评价方法标准化提供参考依据。
猜你喜欢
橡塑技术与装备(2022年3期)2022-03-17
桂林电子科技大学学报(2021年4期)2022-01-05
中学生数理化·高一版(2020年6期)2020-12-17
中学生数理化(高中版.高二数学)(2020年6期)2020-12-04
中国医疗设备(2020年5期)2020-05-20
电子制作(2019年14期)2019-08-20
智能计算机与应用(2019年1期)2019-01-11
消费导刊(2018年10期)2018-08-20
小天使·六年级语数英综合(2017年3期)2017-04-25
电子制作(2017年19期)2017-02-02