机载声呐浮标处理系统设计
2020-10-17 12:09张颜岭陶智
声学与电子工程 2020年3期
张颜岭 陶智
(1.第七一五研究所,杭州,310023;2.海装装备项目管理中心,北京,100071)
声呐浮标处理系统是固定翼反潜巡逻飞机、反潜直升机的重要装备[1]。在搜潜任务中,声呐浮标处理系统接收投放到海上的声呐浮标发射的无线电信号,对其进行解调,得到声呐浮标探测数据、海洋环境测量数据、浮标自定位数据等搜潜信息,系统对这些数据进行处理和显示,并与操作员进行人机交互,获取水下目标信息。声呐浮标处理系统还可获取浮标位置信息,与浮标自定位信息综合处理后,构建持续、稳定的浮标阵态势。另外,处理系统可对投放到海上的声呐浮标进行遥控,改变浮标的工作参数。
1 功能需求
在航空搜潜任务中,机载声呐浮标处理系统与声呐浮标配合执行任务,声呐浮标将探测到的水声信号或海洋环境测量信号通过无线电发送到机载声呐浮标处理系统进行接收、处理。机载声呐浮标处理系统主要功能需求如下:
(1)利用被动声呐浮标、主动声呐浮标、多基地声呐浮标等不同类型的声呐浮标对水下目标进行搜索、跟踪和识别。
(2)利用环境测量浮标获得任务海区的温深剖面和环境噪声数据。
(3)获取浮标位置信息。
(4)对投放到海上的声呐浮标进行遥控,改变浮标工作参数。
(5)与飞机上的任务管理、机内通信等系统进行数据交联。
(6)提供声呐浮标的显示控制画面,与操作员进行人机交互。
2 系统组成
根据需求,机载声呐浮标处理系统由数据接收单元、数据处理单元、显示控制单元、位置获取单元、遥控单元、显示器、键盘/轨迹球等组成,如图1所示。

图1 机载声呐浮标处理系统组成
在机载声呐浮标处理系统中,数据接收单元对声呐浮标上传的无线电信号进行接收和解调,并将解调结果通过系统总线发送到数据处理单元。数据处理单元对浮标阵元域数据进行信号处理、目标识别、目标定位等处理,再通过系统总线将结果发送到显示控制单元。对收到数据进行显示处理后,显示控制单元输出视频信号。显示控制单元还可发送控制命令,对系统的其它设备进行控制,并可接收键盘等操作设备输入的命令,实现人机交互。
位置获取单元负责获取投放到海上的浮标位置并发送到显示控制单元,用于建立浮标阵探测态势。遥控单元收到显示控制单元发送的遥控命令,通过无线电将此信息发射出去,对投放到海上的声呐浮标无线电通道、工作深度等参数进行修改,并可遥控主动声呐浮标、声发射浮标发射声脉冲信号,任务结束时遥控浮标自沉。
3 数据交联
3.1 系统内部交联
机载声呐浮标处理系统内部数据交联主要如表1所示。
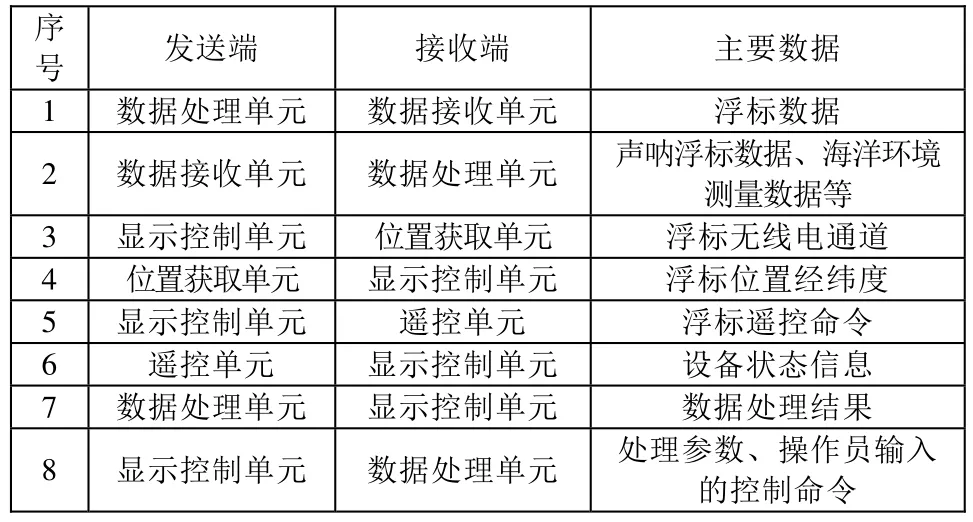
表1 系统内部数据交联
3.2 系统对外交联
机载声呐浮标处理系统主要与机载任务管理系统、导航系统、雷达系统等通过以太网、RS485等总线进行数据交联(图2);并向机内通信系统传输声呐音频信号,用于操作员收听。机载浮标处理系统与机上其他系统交联的数据主要如表 2所示。
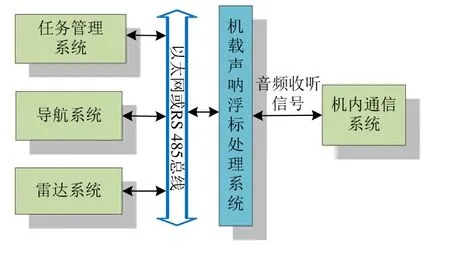
图2 系统对外交联示意图
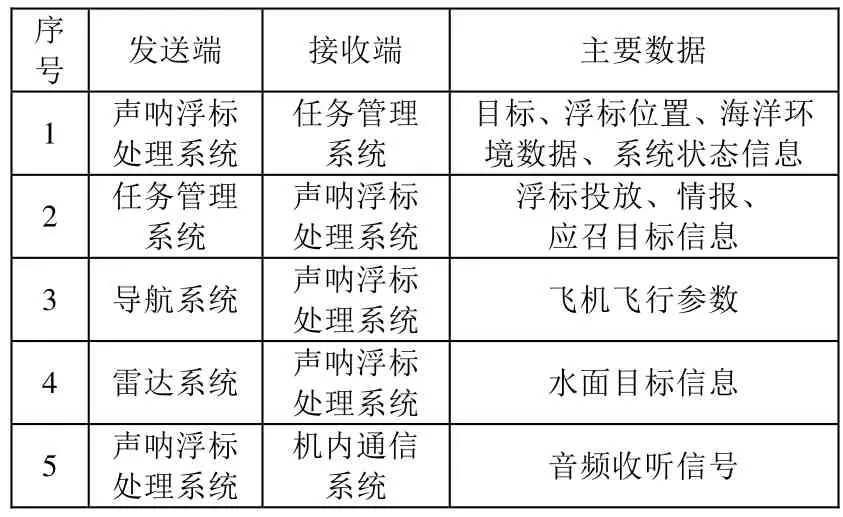
表2 系统外部数据交联
4 功能设计
4.1 目标探测
机载声呐浮标处理系统利用被动声呐浮标对目标实施被动探测;利用主动声呐浮标对目标实施主动探测;使用多基地浮标对目标实施多基地探测。
4.1.1 被动探测
被动声呐浮标完成布阵开始工作,将接收的水声信号通过无线电发送至机载声呐浮标处理系统,数据接收单元对上传的无线电信号进行接收解调,输出浮标阵元域数据至数据处理单元进行处理。根据浮标类型,数据处理单元对浮标的阵元域数据进行低频线谱分析(Low Frequency Analysis and Record,LOFAR)、噪声解调分析(Demodulated Noise,DEMON)、定向低频线谱分析(Directional Low Frequency Analysis and Record,DIFAR)、音频收听(Audio Listening,AUDLI )等处理,结果发送至显示控制单元,输出各枚浮标的显示画面,操作员查看显示画面并收听声呐浮标音频,实现对水下目标的被动探测。
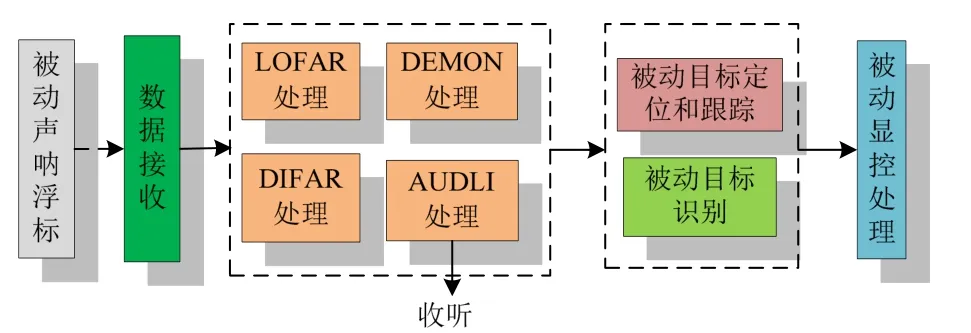
图3 被动探测功能设计
数据处理单元中还运行被动目标定位和跟踪、目标识别等任务,探测过程中,操作员综合视频画面和音频收听情况,适时启动这两项处理任务,处理结果发送至显控处理机作显示处理。
4.1.2 主动探测
主动声呐浮标完成布阵开始工作,浮标按预设程序周期发射声脉冲信号,或接收遥控命令发射特定声脉冲信号。浮标接收水下目标反射回波信号,将回波信号通过无线电发送至机载声呐浮标处理系统。
数据接收单元对浮标上传的无线电信号进行接收解调,输出浮标阵元域数据至数据处理单元。数据处理单元中先进行发射同步信号检测,再根据主动声呐浮标发射的声脉冲参数(如波形、脉冲长度等),对浮标上传的回波数据进行匹配滤波、音频收听处理,对于主动定向浮标,还需进行方位估计。结果发送至显控单元进行显示,输出各枚浮标的探测显示画面,操作员查看显示画面并收听声呐浮标音频,实现对水下目标的主动探测。
与被动探测类似,探测过程中操作员综合视频画面和音频收听情况,适时启动主动目标定位和跟踪、主动目标识别,处理结果发送至显控单元进行显示处理。
4.1.3 多基地探测
多基地探测时,声发射浮标按遥控命令发射声脉冲信号,声接收浮标接收直达波信号和目标回波信号,并将接收到的声信号通过无线电发送至机载声呐浮标处理系统[2],如图4所示。
机载声呐浮标处理系统接收到上传数据后,根据声发射浮标和声接收浮标之间的几何构型、声发射浮标发射声脉冲时刻,在数据处理单元中计算声脉冲直达波到达声接收浮标的时刻,并结合直达波的检测结果,启动对声接收浮标各波束数据的处理,检测目标回波信号,确定目标位置。声接收浮标各波束数据的处理结果发送至显示控制单元中作显示处理,输出各枚声接收浮标的探测显示画面。
对声接收浮标阵元域数据处理时,先进行波束形成,然后根据声发射浮标发射脉冲的拷贝数据进行匹配滤波,对匹配滤波后的数据求包络、选抽降采样后,与噪声估计数据一同送显示控制单元作显示处理。
4.2 海洋环境数据测量
机载声呐浮标处理系统利用温深浮标获得任务海区温深剖面数据,利用海噪声浮标获得任务海区噪声数据。海洋环境数据可用于估计声呐浮标在任务海区的作用距离,为操作员优化调整浮标布阵间距提供参考。
4.2.1 温深剖面测量
温深浮标投放入水后,按预设程序释放温度测量探头,并将探头释放信号上传至机载声呐浮标处理系统。探头释放后,在水中匀速下降,感应海水温度,海水温度变化会使探头输出电信号频率按一定规律发生变化。
数据处理单元对数据接收单元输出的浮标数据进行温深剖面(Bathythermograph,BT)处理。此过程中,先检测探头释放信号,确定释放时刻,然后结合探头在水中的沉降速度,计算得到不同时刻探头在水中的深度。同时对浮标数据进行频率分析,并根据频率与温度的对应关系计算得到探头感应的海水温度,最后将温度信息与深度信息进行关联,获得任务海区的温深剖面。
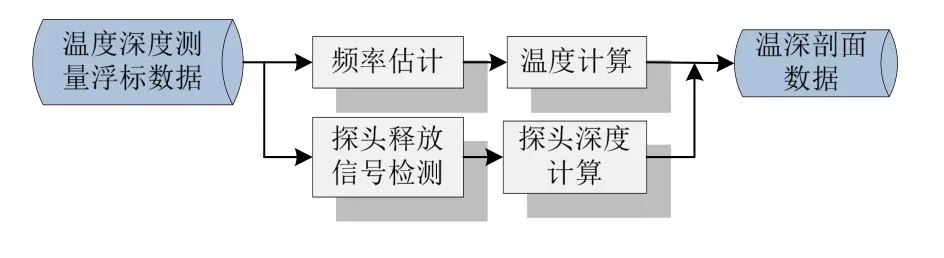
图6 温深剖面处理流程
4.2.2 海洋环境噪声测量
海噪声浮标投放入水后,全向接收海洋环境背景噪声信号,并通过无线电发送至机载声呐浮标处理系统。数据处理单元对数据接收单元输出的浮标数据进行海洋环境噪声测量(Ambient Noise Measurement,ANM)处理。先对浮标数据进行频谱分析,按预设的海洋环境噪声分析频点选择对应频带内的谱线进行求模、求和、积分处理,最后进行谱级转换输出各预设频点的海洋环境噪声谱级值(dB/Hz)。
4.3 声呐浮标位置获取
在机载声呐浮标处理系统中,通过两种方式获取投放到海上的声呐浮标位置信息[3]:一是通过系统中的位置获取单元对浮标进行无线电定位,获取声呐浮标位置;二是接收声呐浮标上传的自定位信息。两种途径获得的浮标位置信息综合处理后用于目标位置计算、浮标阵探测态势构建。
4.3.1 位置获取单元对浮标定位
位置获取单元采用干涉仪测向体制对声呐浮标辐射的无线电信号进行测向,再利用飞行航路上多个站点的测向数据融合处理后获取声呐浮标位置信息。位置获取单元由天线阵、接口调理、开关切换、信号采集、位置计算等模块组成,见图7。
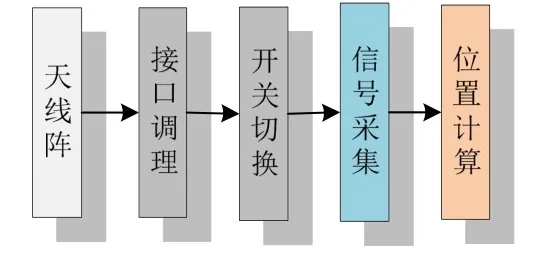
图7 声呐浮标参考分系统组成
天线阵接收声呐浮标发射的无线电信号,接口调理对天线接收的射频信号进行限幅、滤波和相位校正等操作,输出的信号经由开关切换模块分路后,输入信号采集模块,由其进行信号采样和来波方位测量,获取无线电信号的方位信息,并将方位信息发送至位置计算模块进行解算,得到声呐浮标位置信息。
4.3.2 浮标自定位
若声呐浮标中配置有卫星定位模块,浮标投放入水后,可通过卫星定位模块获取浮标位置信息,通过无线电发送至机载声呐浮标处理系统。一般情况下,浮标自定位的位置精度优于位置获取单元对浮标的定位精度。
4.3.3 浮标位置信息使用规则
对于位置获取单元获得的浮标位置信息和浮标自定位信息,机载声呐浮标处理系统在使用时,可按如下规则处理:(1)如果浮标自定位信息有效,系统使用浮标自定位信息;(2)如果未获得浮标自定位信息,则:(a)若位置获取单元输出的无线电定位信息与系统获得的最后一批自定位结果之间偏差小于门限值,则使用位置获取单元的定位结果;(b)反之,则使用最后一批浮标自定位结果作为初始值的位置外推处理结果。
4.4 声呐浮标遥控
在机载声呐浮标处理中,显示控制单元生成输出浮标遥控命令,通过遥控单元向外发射,实现对投放到海上的声呐浮标的控制。遥控单元接收到命令后,判断是否在设备发射保护时间内,若超过发射保护时间,则立即将遥控命令向外发射;若在发射保护时间内,则等待一段时间,超过发射保护时间后再发射。遥控命令发射成功后,将发射完成状态信息上报显示控制单元。
声呐浮标接收到遥控命令后,对命令进行解析并执行,同时上传遥控成功状态信息。在收到遥控单元发送的发射完成及声呐浮标上传的遥控成功状态信息后,显示控制单元向操作员提示遥控成功。若遥控发射成功,但在规定的时间内未收到浮标上传的遥控成功状态,显示控制单元向操作员提示本次遥控未成功,需进行二次遥控。遥控工作流程见图8。
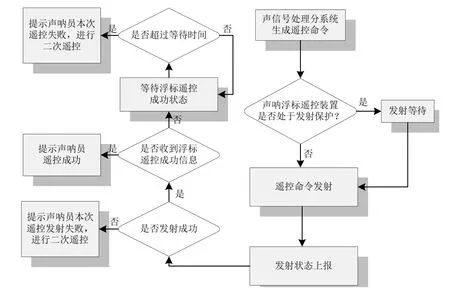
图8 声呐浮标遥控工作流程
4.5 人机交互
机载声呐浮标处理系统通过显示器、键盘、轨迹球等设备与操作员进行人机交互。显示器一般采用20"以上显示器,分辨率优于1280×1024像素。键盘采用通用标准机械键盘;轨迹球采用手型轨迹球。操作员通过键盘快捷键、轨迹球对机载声呐浮标处理系统进行操控。
4.5.1 显示画面布局
系统显示画面由菜单栏、数据显示区、表单区和系统状态栏组成,画面布局如图9所示。数据显示区展示各型声呐浮标的任务态势画面、各型浮标的分析结果画面、系统管理和维护画面等。菜单栏显示系统一级菜单项。表单区显示系统的分析处理参数、目标信息等。系统状态栏显示设备工作状态信息、操作提示信息、已投浮标信息、系统时间等。
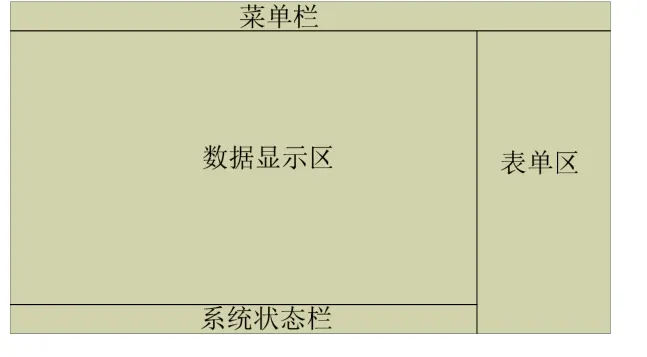
图9 显示画面布局示意
4.5.2 一级菜单项
机载声呐浮标处理系统的一级菜单项主要包含任务态势、被动分析、主动分析、多基地分析、环境分析、系统管理等。操作员可通过各菜单项进入如下画面:
a.任务态势:进入任务态势显示画面,查看浮标阵态势、目标态势、飞机飞行态势、水面目标态势等。
b.被动分析:进入被动声呐浮标分析结果显示画面。
c.主动分析:进入主动声呐浮标分析结果显示画面。
d.多基地分析:进入多基地分析结果显示画面。
e.环境分析:进入环境测量分析结果显示画面,查看任务海区的温深剖面和海洋环境噪声值。
f.系统管理:进入系统管理参数配置、系统状态汇总管理画面。
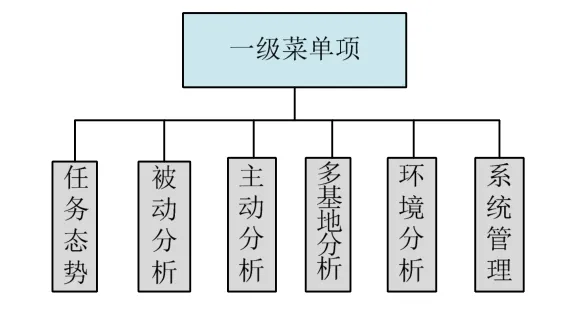
图10 系统一级菜单项
4.5.3 浮标分析结果显示格式
在机载声呐浮标处理系统中,对于被动浮标的分析结果,主要采用频谱瀑布图(横轴为频率轴,纵轴为时间轴)、频率幅度图(横轴为频率轴,纵轴为幅度轴)、频率方位图(横轴为频率轴,纵轴为方位轴)进行显示。频谱瀑布图如图11所示。对于主动浮标的分析结果,采取速度-距离-方位历程图的方式进行显示(图 12),历程图上的每个显示元素上关联方位信息,光标移动到该元素处,显示方位信息。
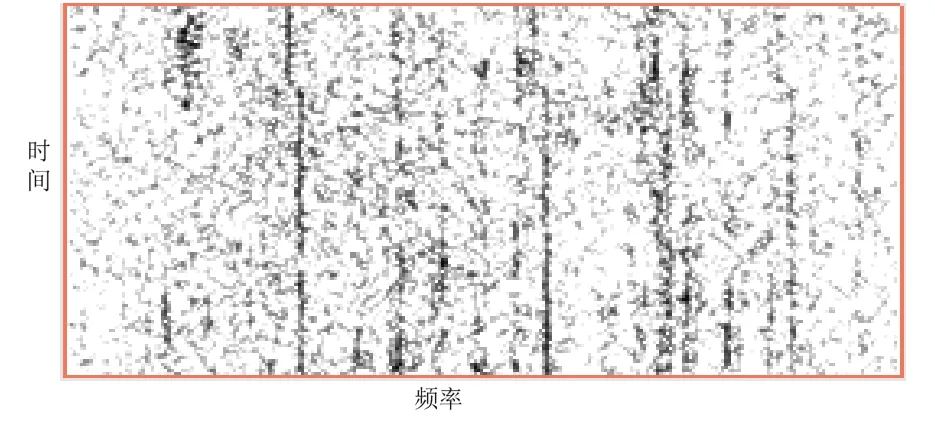
图11 频谱瀑布图示意

图12 主动浮标分析结果显示示意
对于声接收浮标的分析结果,对每个波束采用速度-时间方位历程图进行显示(图13)。纵轴的时间零点为直达波到达声接收浮标的时刻。
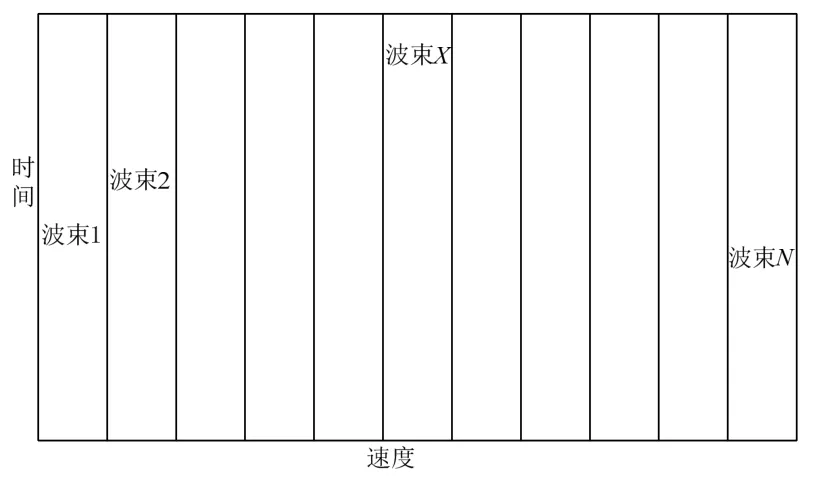
图13 多基地探测分析结果显示示意
5 总结
机载声呐浮标处理系统对浮标上传的探测数据或海洋环境测量数据进行接收、处理和显示,获取浮标位置信息,对浮标进行遥控。在本文中,从系统需求分析出发,综合考虑被动声呐浮标、主动声呐浮标、多基地浮标等不同类型声呐浮标的技术特点,完成了机载声呐浮标处理系统组成架构、数据交联、目标探测、海洋环境测量、声呐浮标位置获取、声呐浮标遥控、人机交互等设计,形成了工程实现前景好的机载声呐浮标处理系统方案。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
小学生优秀作文(低年级)(2021年11期)2021-12-06
舰船电子工程(2021年5期)2021-06-04
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
垂钓(2019年2期)2019-09-10
语文世界(小学版)(2019年2期)2019-02-24