基于六旋翼无人机的智能防控系统总体设计
2020-10-20 06:18王志刚马啸飞孟志
价值工程 2020年28期
王志刚 马啸飞 孟志
摘要:针对复杂环境下仓库智能管理的需求,探索新型的仓库管理方式来改进或取代现有的传统管理方式成为必要。本文以六旋翼无人机为平台,对仓库智能防控系统进行了总体设计,提出总体系统方案,利用数学模型对六旋翼无人机动力系统进行性能分析,设计逆向求解最优配置算法,并提出可供参考的实物和参数建议。
Abstract: To meet the needs of intelligent warehouse management in complex environments, it is necessary to explore new warehouse management methods to improve or replace the existing traditional management methods. In this paper, the six-rotor UAV is used as a platform for the overall design of the warehouse intelligent prevention and control system, and the overall system plan is proposed. The mathematical model is used to analyze the performance of the six-rotor UAV power system, the optimal configuration algorithm for reverse solution is designed, and the suggestions for real objects and parameters are put forward for reference.
關键词:智能防控;六旋翼无人机;系统;模型
Key words: intelligent prevention and control;six-rotor UAV;system;model
中图分类号:V279 文献标识码:A 文章编号:1006-4311(2020)28-0200-05
0 引言
目前仓库安防手段主要是定点监控和人员巡逻,随着定点监控的智能化越来越高,在一定程度上减少了人员巡逻的压力,但对于较大仓库,仍然存在一些问题:①定点监控位置相对较为固定,监控会存在一定死角,监控距离的调整和清晰度受到一定的限制。②大部分监控仅仅用于监视,将图像传输给值班人员,很少或者基本没有现场处置险情和处理出现可疑人员情形的能力。③人员巡逻最显著的一个缺点是容易出现较长空档期,在这个空档期内出现问题并不能及时处置,尤其是区域面积较大的仓库。
设计一种集仓库巡检、险情监测、实时报警、高效处置等功能于一体的智能安全防控系统,大幅提高仓库自主防控能力,显得极其重要并具有广阔的应用前景。本文设计了一种仓库智能防控系统,具备如下功能:能自主或非自主规划路径,并能自动避障;能及时发现、识别、跟踪可疑人物或目标;能发现微弱火源,并能半自主判别为意外火源和进行半自主灭火处理。
1 智能防控系统方案
智能防控系统是集无人机、灭火、非致命武器、光、机、电、信息和控制技术于一体的综合集成武器装备,其主要目的是对仓库库区全范围进行规划路线巡检,替代人员执行任务;探测初期火源并进行有效灭火;发现外来人员、车辆等敏感目标,并实施跟踪、报警、喊话、控制及驱离等任务。
以六旋翼无人机为平台,对仓库智能防控系统进行总体设计。其组成应由地面站系统、通信系统、无人机系统和任务系统组成。控制方式有三种,包括机载计算机自主控制、地面站中央控制台控制、飞手遥控器控制。初步方案如图1所示。
1.1 系统组成
仓库智能防控系统中的无人机系统和任务系统相互结合互为整体,由1套六旋翼无人机巡逻系统和1套六旋翼无人机处置系统组成。其中,六旋翼无人机巡逻系统可挂载高清可见光摄像机和红外热像仪用于广域巡逻侦察、火情初期预警及可疑目标快速搜索,六旋翼无人机处置系统可挂载喊话器、抛投器、催泪弹、灭火弹等多种载荷用于实现处置功能,包括初期火源扑灭、闯入人员驱离打击等。系统组成如图2所示。
整个系统区分硬件系统和软件系统。硬件系统是智能防控防控系统具体功能的实现载体;软件系统则是基于硬件系统实现功能的良好人机接口。
1.2 系统架构
地面站系统包括指挥中心与各仓库建筑物,建筑物之间采用通信光缆连接,保证数据的可靠传输。通信系统由无人机、建筑物和指挥中心的无线数传电台和通信光缆组成,各仓库建筑物的无线数传电台作为通信系统的中继通信节点,延长了指挥中心的对无人机的控制范围。六旋翼无人机采用“1+1”模式,即六旋翼巡逻无人机和六旋翼处置无人机互为补充和互相支持。系统架构如图3所示。
3 任务载荷
依据智能防控系统的应用需求,无人机有效载荷系统主要包括[9]:高清可见光详查相机、红外热像仪、激光测距模块、图像处理单元、防爆防火装置[10];辅助系统包括稳定平台、数传电台(收发双向且含天线)、数传地面站。
有效载荷系统采用小型化、轻量化、模块化设计思路,每个载荷可以单独拆卸及更换,同时有效载荷系统集成在小型的光电吊舱内(含双相机),整体光电吊舱与六旋翼处置无人机任务装置可以相互替换,可共用相同的无人机平台。
①高清可见光相机。高清可见光详查相机主要实现对视场内区域目标进行高清成像,其中镜头采用变焦镜头,兼顾远近距离成像。
②红外成像仪。鉴于需要检测库区的疑似火源主要是自然火,植被、树木火灾为主,并且载荷的体积重量功耗等主要受限于搭载无人机平台,所以建议采用长波红外热像仪,以实现30~50m的疑似火源探测识别及告警,其中镜头采用变焦镜头,兼顾远近距离成像。设计运用火焰分析技术,通过红外传感器和光学过滤器,对二氧化碳发射光谱具有较高的灵敏度,当检测到相应红外频谱模型的数据与火焰的红外频谱相一致时,可以给出报警信号,确保探测器准确无误的探测到火焰信号[11]。
③激光测距模块。激光测距模块可以对指向的目标位置进行距离测量,该激光测距模块与可见光相机及红外相机应采用平行轴向的安装方式,能够准确指向被探测目标的位置,便于准确测量被测目标的距离。
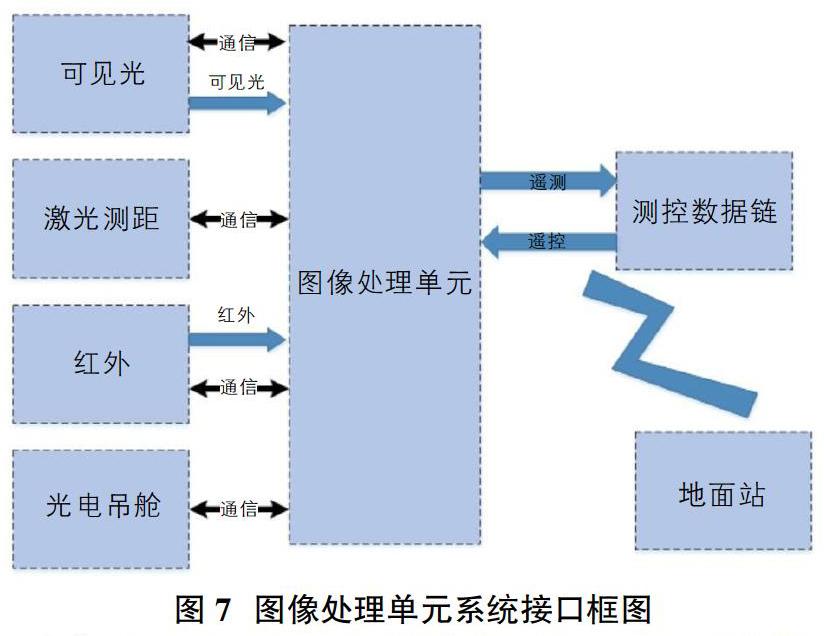
④图像处理及存储单元。图像处理及存储单元主要实现高清可见光/红外图像接收、可见光/红外目标检测识别、位姿距离解算、数传链路通信、原始数据存储等功能。图像处理单元处理图像处理功能之外,还要负责接收无人机平台的定位/姿态数据,接收地面站上行的控制命令并实现对载荷装置的控制,发送有效载荷的图像数据和目标识别数据等[12]。其接口框图如图7所示。
⑤光电吊仓。为了实现“巡逻系统+处置系统”即1+1模块化快速搭载方式,可以采用光电吊舱方式,将有效载荷集成在一个光电吊舱内。高清可见光详查相机、红外热像仪、激光测距机、图像处理单元、测控通信单元集成于一个光电载荷吊舱内,实现火焰探测识别及告警、可疑目标可见光详查与识别跟踪、激光测距及目标位置提取等功能。集成全部载荷之后的光电吊舱全载荷总重量不大于4.5kg,悬挂于无人机的下方,接收数传设备发出的搜索、变焦、捕获、跟踪等指令,完成对目标的搜索、定位、识别、跟踪以及报警,并可以输出图像给数传设备。光电吊舱主要功能[13]:一是通过稳瞄转塔实现惯性稳定,保持无人机在机动飞行、机体振动和其它干扰情况下稳定巡查、跟踪等功能;二是光电吊舱光机系统为方位、俯仰两轴结构,红外热像仪和可见光相机采用模块化,针对不同应用时,可自由更换;三是光电吊舱机载操控系统接收计算机发出的操作指令后,可以执行包括手动搜索、自动跟踪,红外热像仪与可见光CCD摄像机的操作控制指令,伺服系统的关停,以及无线传输等在内的控制指令;四是根据控制命令实时地对目标进行手动搜索和自动跟踪,把目标图像信息实时地传送给地面站监视器。
⑥数传电台。无人机与地面站之间具有双向通信能力,测控数据链路需要使用数传电台,满足4Mbps以上的下行数据通信能力[14],以及9.2kbps的上行通信能力,为确保指挥中心与六旋翼无人机的可靠通信,可设立多个无线电通信中继,以避免通信盲区造成的失联。
⑦防爆防火装置。为了能和光电吊仓互相更换,防爆防火装置,也是采用吊仓方式,增加弹射装置,可装配喊话器、催泪弹、灭火弹等多种载荷用于实现处置功能,标准化设计各种载荷,使载荷可互相更换,如装配的多于1种载荷,相互间互不影响。
4 地面站
地面站以高性能计算机为基础,与接收机一起采取一体化设计,方便安装和使用。整个系统的智能化主要体现在地面站的处理能力[15],地面站配以仓库智能防控软件系统,能实现通信、监视、目标识别与跟踪、控制无人机、数据记录和报警等功能,利用深度学习算法提高新型仓库管理方式的智能化。
5 结束语
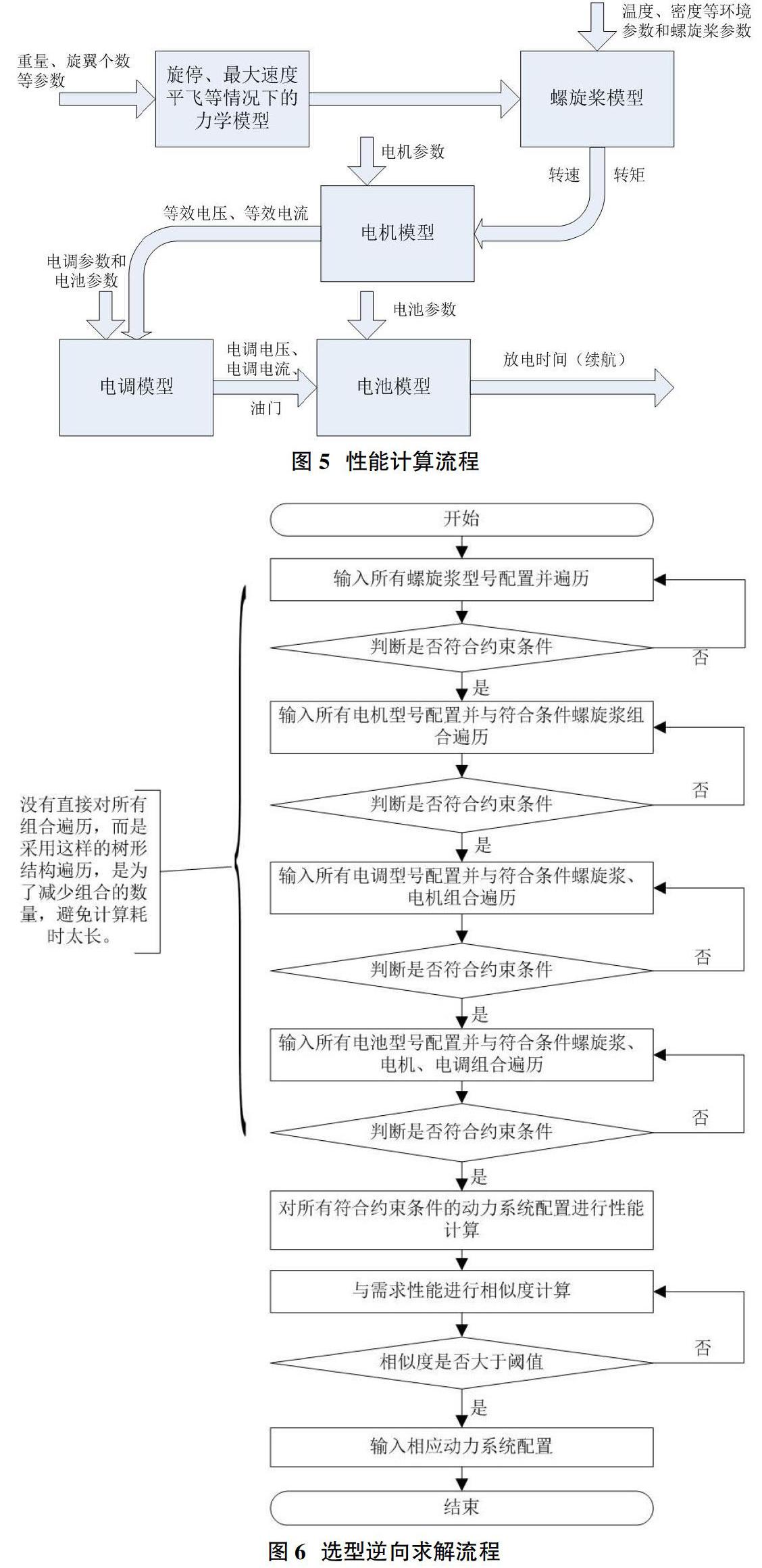
本文提出了以六旋翼无人机为平台的仓库智能防控系统总体设计,利用建模的方法对无人机性能进行分析[16],提出逆向求解无人机动力系统选型的算法,对任务载荷和地面站功能提出可供参考的意见。整个系统虽然仍然需要有人参与,大大增加了人的感知和处置范围,与现有仓库的防控系统相比,有很大的优势,为仓库管控智能化的推进提供一个可行方法。
参考文献:
[1]杨帆.微型四旋翼飞行器的建模与控制系统研究[D].太原理工大学,2014.
[2]张勇.一种具备空中作业能力的四旋翼飞行器系统设计[D].东南大学,2017.
[3]刘海涛,魏汝祥,田志强.基于非线性 PLS 回归的军用软件成本估算[J].系统工程与电子技术,2014(7):1352-1357.
[4]席亮亮,王海峰,王亚龙.螺旋桨动力系统测试平台设计研究[J].航空科学技术,2018(8):17-22.
[5]MOFFITT B A, BRADLEY T H, PAREKH D E, et al. Validation of Vortex Propeller Theory for UAV Design with Uncertainty Analysis[C]. In: Proc. 46th AIAA Aerospace Sciences Meeting and Exhibit, 2008, AIAA2008.
[6]MERCHANT M P. MILLER S. Propeller Performance Measurement for Low Reynolds Number UAV Applications[C]. In: 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 2006, AIAA 2006.
[7]郑华清.基于运动捕捉系统的多旋翼无人机室内导航与控制研究[D].南京航空航天大学,2017.
[8]全权.多旋翼飞行器设计与控制[M].电子工业出版社,2018.
[9]尹魯杰.基于小型涵道无人机地面站软件设计[D].青岛科技大学,2014.
[10]李宁.多DSP并行系统图像融合算法设计及优化[D].南京理工大学,2015.
[11]北京京盾消防设备公司.各种火焰探测器的性能对比[EB/OL].http://www.bjjdxf.com/baike/20190522301.html,2019-05-22.
[12]王静华.基于Camera Link标准的高速图像激励与采集系统[D].电子科技大学,2013.
[13]JCJ106.2017年无人机输电巡线系统项目解决方案[J/OL].道客巴巴,2017(07).http://www.doc88.com /p-4184927684792.html.
[14]李莹.基于移动通信网络的无人机远程监测系统的研究[D].天津大学,2016.
[15]马俊.基于GoogleEarth的无人机地面站监控系统[D].南京航空航天大学,2011.
[16]安高锋.某型无人机飞行控制器的设计与仿真[D].南昌航空大学,2015.
作者简介:王志刚(1987-),男,贵州贵阳人,硕士研究生,研究方向为毁伤理论与弹药工程;马啸飞(1993-),男,甘肃会宁人,硕士研究生,研究方向为武器系统保障工程。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
成都医学院学报(2021年2期)2021-07-19
军民两用技术与产品(2021年10期)2021-03-16
中学生数理化·七年级数学人教版(2020年10期)2020-11-26
数学物理学报(2020年2期)2020-06-02
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2019年10期)2019-10-26
中国洗涤用品工业(2019年4期)2019-05-11
家庭影院技术(2017年9期)2017-09-26
光学精密工程(2016年6期)2016-11-07