
一种探管式储粮害虫诱捕在线监测装置的设计研究
2020-10-21 08:48王威松周慧玲成思扬汪中明
中国粮油学报 2020年9期
王威松 周慧玲 秦 戈 成思扬 汪中明 崔 淼
(北京邮电大学自动化学院1,北京 100876) (国家粮食和物资储备局科学研究院2,北京 100037)
在长时间、大容量的原粮存储过程中,及时准确地监测粮仓内早期害虫的发生情况,是对储粮虫害进行综合治理、控制其发生和发展的主要依据。在粮仓内,蛀蚀性害虫主要有象甲科(米象、玉米象)和长蠹科(谷蠹),粉食性害虫主要有扁谷盗科(长角扁谷盗、土耳其扁谷盗、锈赤扁谷盗)、拟步甲科(赤拟谷盗、杂拟谷盗)和锯谷盗科(锯谷盗)。这两大类害虫一般在粮堆中同时存在,它们数量的快速增长对粮食的数量和质量会造成很大的危害。
近年来,对粮堆内部害虫发生的监测已经逐渐引入了电子化的手段,例如利用介质电导率、气味、声音和红外光信号等信息作为判别害虫的测量手段。其中电子探管,是基于探管式诱捕器[3]和红外光电传感器设计的一种监测装置,因其价格经济,既能够监测粮堆内部不同深度的害虫发生情况,又能够估计害虫密度[1, 2],具有广泛的应用前景。最先提出且具有代表性意义的电子探管是Litzkow等[4]的电子粮食探管害虫计数器 (Electronic Grain Probe Insect Counter, EGPIC),它通过一对红外光电发射和接受二极管监测通过其中的害虫。当害虫穿过时会对光束产生遮挡,电路将遮挡程度转换成对应的电信号,以遮挡程度是否超过预设阈值为特征来实现对害虫的计数。Shuman等[5]对EGPIC进行了改进,用同一层面相互垂直的两对二极管最大遮挡程度的和方根为特征,一定程度上降低了害虫下落姿态对计数准确率的影响,并实现了对米象和锈赤扁谷盗做二分类的功能[6],加拿大OPI Systems公司于2003年将其注册为了商业化产品Insector[7],但目前未在我国看到有销售和应用。Toews等[8]将探管式诱捕器对锈赤扁谷盗的捕获进行了详细的对比实验,验证了探管直径在26~60 mm范围内不影响害虫的捕获效果,15 cm长的捕虫段内的孔密度在40~120个范围内对害虫的捕获效果是一样的。国内熊鹤鸣等[9]将探管式陷阱诱捕法同扦插取样法进行了对比,发现探管式诱捕器比取样器更能准确地监测害虫种群的数量变化。上述研究为本研究装置的设计和实现提供了可靠的经验。但是对Insector相关的公开文献[10]进行分析,电子探管虽然对捕获的害虫实现了较高准确率的计数,但对害虫的分类识别仅关注了对害虫体长信息的粗糙提取[11],并没有充分利用害虫下落时整个遮挡过程对应的电信号,即整个红外光电序列,且对电子探管获得的红外光电序列数据的分布稳定性没有公开的论述。我们认为只有在确定了数据分布的稳定性后,后续的分类算法工作才有意义。

图1 储粮害虫诱捕在线监测装置
本研究基于探管式诱捕器,结合红外光电传感技术,主要做了以下工作:
a)研发了储粮害虫诱捕在线监测装置(下文简称装置),可采集完整的红外光电序列,并基于该装置建立了蛀蚀性害虫(米象、玉米象、谷蠹)和粉食性害虫(长角扁谷盗、土耳其扁谷盗、锈赤扁谷盗、赤拟谷盗、杂拟谷盗、锯谷盗)的红外光电序列数据集;
b)基于数据统计和数据可视化的方法验证了害虫进入诱捕段的位置(下文简称初始高度)不影响红外光电序列数据分布的稳定性,不同害虫样本之间的多样性也不会破坏红外光电序列数据分布的稳定性;
c)利用整个红外光电序列,基于高斯核支持向量机模型,给出了蛀蚀性害虫和粉食性害虫的二分类结果,以及这两大类害虫中不同种害虫的细分结果。
1 装置设计
本研究设计的装置原型及其示意图如图1a和图1b所示。它主要由5部分组成:诱捕模块、收集漏斗、监测及释放模块、数据采集电路板和数据传输电路板。监测电路的关键部件参数如表1所示。
1)诱捕模块:基于探管式诱捕器设计,用于对储粮害虫的诱捕。探管的高度可以通过增减该模块的个数而改变。本研究用可改变高度的纸盒替代诱捕模块,以模拟储粮害虫从不同初始高度进入装置的情况。
2)收集漏斗:储粮害虫从诱捕模块进入后往下掉落,收集漏斗约束掉落过程中害虫的运动轨迹,使得害虫能够进入红外光电传感器的监测范围。
3)监测及释放模块:由红外光电传感器和害虫释放出口组成。红外光电传感器采用对射型红外光电二极管。释放孔用于将采集完数据的害虫释放,在一定程度上保证了粮堆内部害虫的分布不被破坏。
4)数据采集板:用于对红外光电传感器数据的采集控制,主要由运算放大器、微控制器片上定时器和片上模数转换器完成。
5)数据传输板:用于将数据采集板采集到的数据通过串口传输至PC端并保存,以进行数据分析和建模。
一个完整的数据采集过程描述如下:储粮害虫从诱捕模块进入装置,跌落至收集漏斗后沿收集漏斗往下滑落,在下落至监测及释放模块处开始遮挡传感器的光束,传感器在不同面积的遮挡下将产生不同的光电流信号,数据采集板将光电流信号转化为离散的电压信号并放大,最后数据传输板将数据采集期间的所有电压信号上传至PC端,储粮害虫从释放孔逃走。

表1 监测电路的关键部件参数
2 数据分析
2.1 数据采集
2.1.1 红外光电序列
为模拟害虫进入诱捕段的自然掉落,将储粮害虫无初始速度地释放进装置中。将装置做遮光处理,以模拟粮堆内部的黑暗环境,完成数据采集过程,数据采集示意图如图2所示。当没有害虫掉落时,电路采集到的电压值在基准电压0.94 V上下波动,且不超过阈值1.03 V。原型装置采用了互相垂直的两组传感器,如图2a中的传感器1和传感器2,当有害虫掉落时,电压值将发生突变,产生一个凸起的波形,所以一个害虫样本对应两个波形,分别对应图2b中的蓝色波形和红色波形。将一个害虫样本对应的两个波形记为一个红外光电序列,将任意一组传感器的波形记为该红外光电序列的一个通道,即装置采集到的红外光电序列有两个通道。

图2 数据采集示意图
为深入理解红外光电序列,将一个害虫样本的数据采集过程分为两步进行描述:第一步从害虫刚进入红外光电传感器的光束范围开始到害虫在光束内的遮挡程度最大为止,对应波形的上升部分,即t0到t1时刻,如图2c所示;第二步从害虫在光束内的遮挡程度最大开始到害虫完全离开光束范围为止,对应波形的下降部分,即t1到t2时刻。记t2-t0为该害虫样本的采样时长,若装置的采样频率为fsample,则该害虫样本的红外光电序列数据的长度(采样点数)为(t2-t0)×fsample。其中t0时刻为红外光电序列任一通道最先超过阈值1.03 V的时刻,t2时刻为红外光电序列任一通道最晚低于该阈值的时刻。
2.1.2 数据集的建立
本研究的试虫来源于国家粮食和物资储备局科学研究院储藏所,均为成虫活虫,在实验期间养于实验室室温条件(温度22~25 ℃、相对湿度40%~50%),培养饲料均为小麦。设置10 kHz的采样频率,对9种害虫在不同初始高度下进行红外光电序列数据的采集。建立的储粮害虫的训练集和测试集的红外光电序列数量如表2所示。为避免分类器过拟合,均分不同种别的数据数量以保证不同小类的数据数量相同。其中:*3是指在三种不同的初始高度(50、100、150 mm)下进行的数据采集,被乘因子108为在各初始高度下采集的样本数量,训练集与测试集为三种初始高度下数据的均匀混合。
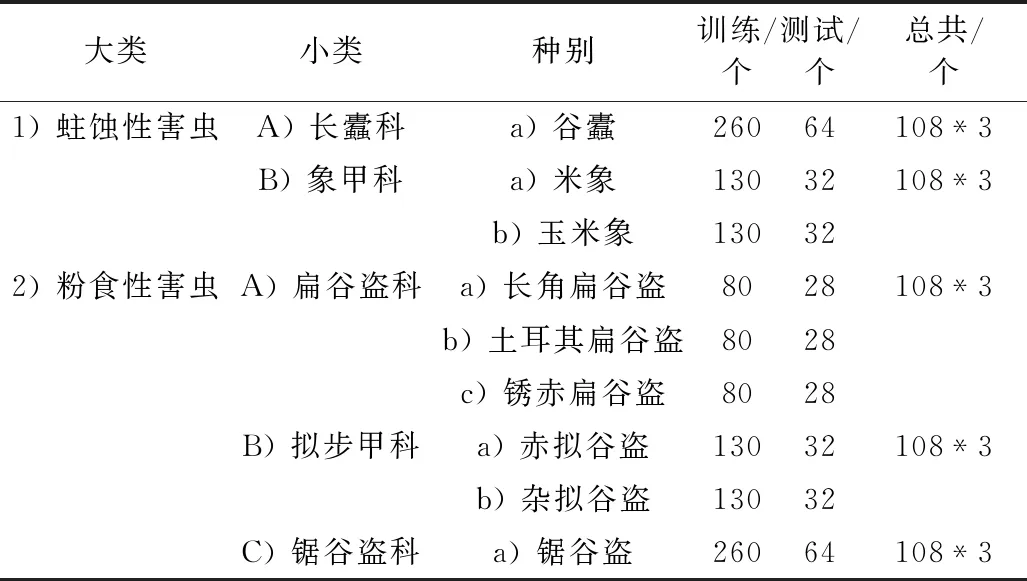
表2 训练集和测试集的红外光电序列数量

注:图a检测到两条数据90次(未发生抱团);图b检测到一条数据10次(发生抱团)。图3 两头长角扁谷盗害虫在同一高度同时进入装置的实验测试结果图
本研究提出的方法是用于对害虫的早期发生进行监测,虫口密度较低。但我们对两头害虫同时进入装置的低概率情况也做了模拟测试。将两头长角扁谷盗在同一高度无初始速度地同时释放进装置,在100次实验中,两头害虫抱团进入传感器监测范围而得到一条数据的情况只出现了10次,图3展示了模拟测试结果。所以本研究只对单头害虫逐一进入装置的情况进行了研究。
2.2 数据分布的稳定性分析
只有在确定了红外光电序列数据对初始高度的鲁棒性,以及对样本多样性的鲁棒性,才能进行后续的分类工作。
害虫种别是害虫采样时长的影响因子,体积越小采样时长越短。若不同的初始高度能导致害虫样本的采样时长具有很大的差异,即害虫样本的采样时长是初始高度的函数(如初始高度越高采样时长越短),那么低初始高度的小体积害虫和高初始高度的大体积害虫将可能具有相同的采样时长,而在不同初始高度的同体积害虫却可能具有不同的采样时长,这将会导致数据分布的不稳定。另外,若红外光电序列的分布不受初始高度影响,但受同种害虫不同样本多样性(下落姿态、个体差异等)的影响,那么数据分布依然会是不稳定的。
2.2.1 对初始高度的鲁棒性分析
害虫的下落过程大致包括自由落体、与收集漏斗的碰撞、在收集漏斗上的滑落和在监测及释放模块中的自由落体,整个运动过程十分复杂,所以本研究通过数据统计的方法进行了分析,而不对整个运动过程进行建模。考虑到任意一种害虫在红外光电序列数据对初始高度的鲁棒性的问题上均具有代表性,本研究以谷蠹为例进行了分析。基于谷蠹的红外光电序列数据,通过数据统计的方法得到谷蠹在不同初始高度下的采样时长的箱线图,如图4所示。通过分析发现,谷蠹在50、100、150、200 mm的初始高度下,箱线图的中心和散布均没有明显差异。将不同初始高度谷蠹的红外光电序列数据数量、采样时长与初始高度的方差分析结果列于表3,计算方法如式(1)~式(5)所示。不同初始高度下各样本采样时长的均值为
(1)
式中:i代表不同初始高度,j代表不同样本,xij为不同初始高度下不同样本的采样时长,Mi为各初始高度下的样本数量,式(2)、式(3)中符号含义均同式(1)。所有初始高度下各样本采样时长的均值为
(2)
式中:n为全部样本数量,k为初始高度种类,式(3)、式(4)中符号含义均同式(2)。处理均方为
(3)
误差均方为
(4)
F检验统计量为
(5)
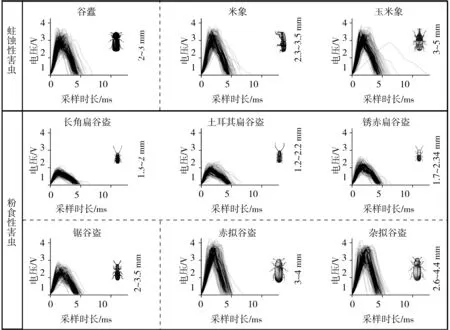
查F检验临界值表,N1=k-1=3,N2=n-k=428时,F0.05=2.626,F0.01=3.828,而谷蠹在4种不同初始高度之间F值为1.204 9,F 图4 谷蠹在不同初始高度下的采样时长的箱线图 表3 谷蠹的红外光电序列数据数量、及采样时长与初始高度的方差分析结果 2.2.2 对样本多样性的鲁棒性分析 基于红外光电序列训练和测试数据集,对每一种别害虫均随机采样108个样本,将红外光电序列不同通道的离散数据的和方根连接成线条,进行数据可视化,如图5所示。线条重叠次数越多的地方颜色越深,而只有一根线条的地方颜色最浅,我们通过颜色的深浅分布来判断红外光电序列数据分布的稳定性。每种害虫都有且只有一个颜色最深的区域带,即同一种害虫的样本数据均集中在同一个分布内,说明红外光电序列数据的分布对样本多样性具有鲁棒性。 图5 红外光电序列数据集可视化 害虫进入装置的初始高度和样本多样性均不影响装置采集到的数据的分布,即红外光电序列数据的分布具有一定的稳定性,可以利用整个红外光电序列做分类研究。 本研究采用将各通道同一时刻的电压值做和方根的方式进行数据预处理,采用高斯核的支持向量机[12]对经过预处理后的红外光电序列训练数据集进行建模,通过基于10折交叉验证的网格搜索的方式进行参数寻优,待求解到最优参数后,用该参数和训练数据集全体重新求解得到最优分类器,最后用该分类器在测试数据集上进行性能评估,其中准确率、召回率、F1值及其加权平均分别为 (6) (7) (8) (9) 式中:wi为类别i的样本数在测试集中占的比例。蛀蚀性害虫与粉食性害虫的分类结果如表4所示,两类的平均准确率达87.7%。召回率、F1值与准确率相近,说明该分类结果没有受到样本均衡问题的影响。 表4 蛀蚀性害虫与粉食性害虫分类结果 本研究还进一步对蛀蚀性害虫和粉食性害虫内的小类进行了细分识别,其结果如表5和表6所示。对于蛀蚀性害虫,因为长蠹科(谷蠹)和象甲科(米象、玉米象)的体长、体积相近,同时红外光电序列数据携带的形状信息太过粗糙,无法精准区分两者的形状差异。在粉食性害虫中,扁谷盗科(长角扁谷盗、土耳其扁谷盗、锈赤扁谷盗)、拟步甲科(赤拟谷盗、杂拟谷盗)和锯谷盗科(锯谷盗)这三类的红外光电序列的形状差异比较明显,三类的平均准确率为87.7%,对于数据差异最为明显的拟步甲科(赤拟谷盗、杂拟谷盗)的分类准确率可达95.3%,这与拟步甲科同另两类害虫的体长、体积差异最大这一事实相符。 表5 蛀蚀性害虫细分结果 表6 粉食性害虫细分结果 本研究提出了一种用于粮堆内部的储粮害虫诱捕在线监测装置,通过建立红外光电序列数据集和分析实验数据,验证了该装置具有在线监测害虫的可靠性。同时提出了充分利用害虫在下落时对红外光电传感器遮挡的整个过程的光电信号的方法,并基于高斯核支持向量机模型在测试集上达到了87.7%的加权平均分类准确率。此外,本研究还探索了更精细化分类的可能性,对于开发实际可应用的探管式储粮害虫发生监测设备具有指导意义。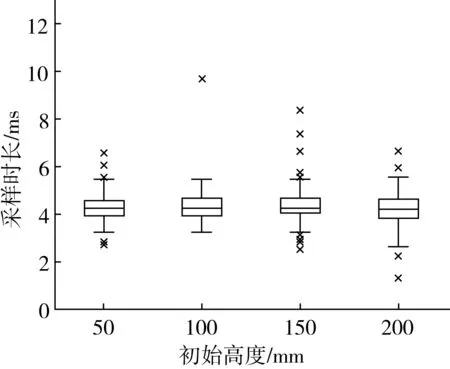

3 实验



4 结论
猜你喜欢
红外技术(2022年11期)2022-11-25
中国典型病例大全(2022年7期)2022-04-22
发明与创新(2021年39期)2021-11-05
好孩子画报(2021年9期)2021-09-26
纺织科学研究(2021年1期)2021-03-19
今日农业(2020年23期)2020-12-15
粮食科技与经济(2020年1期)2020-07-09
中国粮食经济(2020年1期)2020-01-08
青年时代(2017年4期)2017-03-10
营销界(2015年23期)2015-02-28
