气吸式胡萝卜起垄播种一体机研制
2020-10-23 00:57王方艳鲍余峰江景涛
农业工程学报 2020年17期
王方艳,杨 亮,鲍余峰,江景涛
气吸式胡萝卜起垄播种一体机研制
王方艳,杨 亮,鲍余峰,江景涛※
(青岛农业大学机电工程学院,青岛 266109)
该研究结合山东等地的胡萝卜垄作种植模式,研制了一种集起垄、开沟、精量播种、覆土、镇压等功能于一体的气力式胡萝卜精量播种机,实现胡萝卜垄上窄行精量播种作业。该机采用负压吸种、正压吹杂完成单粒精量播种,主要由气吸式精量排种器、起垄整形装置、开沟分种装置、覆土器、机架及传动系统组成。根据吸种及投种过程的种子受力及运动分析,得到排种器气室真空度临界值,明确了投种位置及株距均匀性的主要影响因素。设计了双圈型孔排种盘,排种盘内外圈型孔所在圆周半径分别为87.5和95.0 mm,每圈型孔数量为30个。依据清种要求及作业空间,设计锯齿刮板式及偏心式刮种器,实现型孔两侧刮种;根据种植农艺要求,确定FL-2.5型风机,实现不同播种风量要求;采用3个双翼铧式犁起垄,并通过整形装置对垄形进行修整,一次完成2个梯形垄;遵循单体双窄行、浅开沟及少覆土要求,确定了开沟分种结构及覆土板参数。依据投种过程分析,采用低位投种方式,最低限度布置排种器,开沟分种装置总体高度在100 mm左右。以排种盘型孔直径、排种盘转速和气室负压为试验因素,以粒距合格率、漏播率和重播率为试验评价指标,进行三因素五水平的二次回归正交旋转组合试验,获得排种器最佳参数组合为型孔直径1.6 mm,排种盘转速18 r/min,气室负压4.4 kPa。田间试验结果表明,该机播种粒距合格率大于94%、漏播率小于5%、重播率小于4%,满足相关国家标准及胡萝卜种植农艺要求,可为胡萝卜精量播种机具的设计提供参考。
农业机械;设计;播种机;胡萝卜;气吸式
0 引 言
中国的胡萝卜种植面积及产量均居世界首位,但机械化精密播种水平不高[1]。山东、河南及福建等地区是主要的胡萝卜种植区,多采用一垄两行和一垄四行的垄作种植模式,种植行距窄、种植密度大、产量高,已被广大种植户认可,但机械化播种要求高。同时,当前胡萝卜起垄、播种环节是分开的,不利于耕地保墒及种子发芽。包衣胡萝卜种子形状圆整规则,解决了裸种形状不规则、流动性差而引起播种机型孔堵塞及易伤种的难题,为实现机械化播种提供了条件[2]。
欧、美、日、韩等发达国家的播种技术及装备较为成熟,精密播种机多采用气吸式排种器,通过更换排种盘可实现胡萝卜等多种蔬菜的精量播种[3]。以意大利马斯奇奥(Maschio)公司、美国满胜(Monosem)公司和德国阿玛松(Amazone)公司生产的蔬菜精量播种机为代表[4-5]。这些播种机适应多种小籽粒蔬菜的精密播种,幅宽大,能一次完成多种作业工序,性能稳定,但配套动力大、价格较高,不适应中国的胡萝卜垄作种植模式。在借鉴国外先进技术的基础上,国内研发了几种胡萝卜精量播种机,各具特色且适用于不同的工作环境。王晋[6]研制的气力式胡萝卜播种机,配套动力为22 kW,无起垄装置,排种盘型孔直径为0.6 mm,播种胡萝卜裸种易堵塞型孔,不适合播种包衣胡萝卜种子。王海等[7]研制了电动双行胡萝卜播种机,采用机械式排种器,结构简单、造价低,但播种效率仅为0.13~0.27 hm2/h,适合小地块播种。王家胜等[8]研制了胡萝卜种绳播种机,主要完成已编胡萝卜种绳的铺放,播种机性能指标受种子编绳精度的影响,且播后浇灌溶绳,多配套滴灌带铺设。袁鹏飞等[9]研制的2HBJ-4型胡萝卜精量播种机,配套动力为44.1~51.4 kW,可一次完成起垄、施肥、播种和覆土等作业环节,但一个排种器仅能播种单行胡萝卜,整机结构尺寸较大、造价高,未见推广应用。黑龙江德沃科技开发有限公司研制的2BQS-8X型气力式胡萝卜播种机,可完成4垄8行的垄上播种作业,采用2个排种器错位排列实现窄行距播种,但动力消耗大、整机结构不够紧凑,且不能起垄作业[10]。
胡萝卜的垄作种植模式具有保墒、防涝及提温的效果[11]。将起垄与播种作业融合,一次性完成起垄、播种、覆土等作业工序,可减少机具多次进地造成的土壤过度压实,提高种子发芽率。因此,本文针对山东等地区胡萝卜一垄两行窄行距的种植模式,优化起垄成型结构、窄行开沟播种等关键部件,研制了一种气吸式胡萝卜起垄播种一体机,这对实现胡萝卜的单排种器窄行精密播种作业具有重要意义。
1 整机结构与工作原理
胡萝卜垄作种植模式便于灌溉、排水,有利于提高胡萝卜品质,而且便于机械化种植和收获。山东、河南及福建等胡萝卜主要种植区采用一垄两行和一垄四行的种植模式[12-16],种植模式如表1所示。
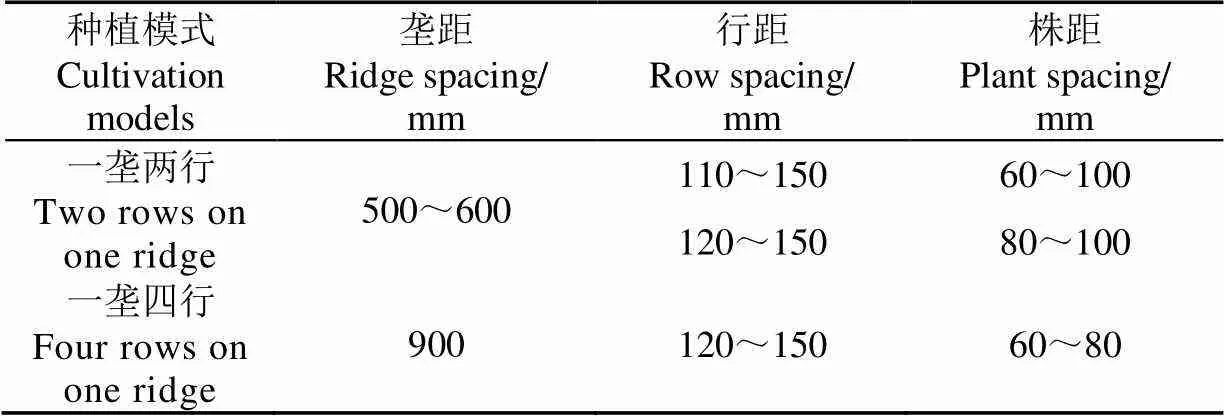
表1 胡萝卜各地种植模式
播种机主要由机架、风机、地轮、起垄整形装置、开沟分种装置、排种器、覆土器、镇压轮等组成,具体结构如图1所示。

1.风机 2.机架 3.起垄犁 4.整形装置 5.仿形机构 6.传动系统 7.开沟分种装置 8.排种器 9.覆土器 10.地轮 11.镇压轮
工作时,拖拉机牵引机具前进,拖拉机后动力输出轴带动风机转动,为排种器提供正、负气压。位于机具前方的3个铧式犁开出3条垄沟,形成2个垄形,并在鼓形整形装置的滚动镇压下形成梯形播种垄。2个播种机单体分别通过四连杆仿形机构挂接在机架上,保障播种单体随地浮动,播种深度一致。同时,地轮借助与土壤的摩擦力滚动,通过链传动带动排种器中的排种盘转动,将种子由种箱带到分种管,并落入开沟器开好的种沟内,并经覆土器和镇压轮完成覆土、镇压,完成播种。其中,排种器为气吸式排种器,通过壳体的负压区吸种,零压区投种,正压区吹杂,可通过改变链传动比,调整机具前进速度与排种盘转速的配比,满足不同播种株距要求。播种机主要技术参数如表2所示。

表2 气吸式胡萝卜起垄播种一体机主要技术参数
2 关键部件设计
气吸式胡萝卜起垄播种一体机主要包括传动装置、排种器、起垄整形装置、开沟分种装置、覆土器等。起垄整形装置完成开沟、起垄、镇压工序,借助双翼式犁体结构形成梯形垄。开沟分种装置具有开浅沟和分种导向功能。排种器通过风机负压吸种、双向刮种、零压投种、正压吹杂,实现胡萝卜种子的单粒播种。覆土器需完成种子的定量覆土。
2.1 排种器设计
气吸式胡萝卜排种器主要由左、右壳体、气吸垫、排种盘、种箱、导种器、上刮种器、下刮种器等部件组成,负压气室在左壳体上,种箱和右壳体为一体结构,排种器工作分为吸种、清种、携种、投种和吹杂5个过程。排种器结构示意图如图2所示。

1.壳体盖 2.左壳体 3.负压接口 4.气吸垫 5.气吸垫压盘 6.压盘套 7.排种盘 8.传动轴 9.上刮种器 10.下刮种器 11.种箱 12.挡种板 13.右壳体 14.导种器 15.正压接口
1.Housing cover 2.Left housing 3.Negative pressureinterface 4.Air sealing gasket 5.Air sealing gasket platen 6.Platen liner 7.Seed-metering plate 8.Transmission shaft 9.Upper scraping device 10.Lower scraping device 11.Seeds box 12.Clapboard of seeds 13.Right housing 14.Seed-guiding plate 15.Positivepressureinterface
注:Ⅰ为充种区;Ⅱ为清种区;Ⅲ为携种区;Ⅳ为投种区;Ⅴ为吹杂区。
Note: Ⅰ is seed filling area; Ⅱ is seed clearing area; Ⅲ is seed carring area; Ⅳ is seed planting area; Ⅴ is impurity treatment area.
图2 排种器结构示意图
Fig.2 Schematic diagram of seed-metering device
2.1.1 充种过程分析


式中Hmax为气室临界真空度, Pa;为一粒种子的质量,kg;为种子重心与排种盘之间距离,m;为排种盘型孔直径,m;ν为排种盘型孔处的线速度,m/s;为型孔所在圆周半径,m;为种子的摩擦阻力综合系数,=(6~10)tan,为种子的自然休止角,(°);1为吸种可靠性系数,1=1.8~2.0[17-18];2为工作稳定可靠性系数,2=1.6~2.0[17-18]。
试验测得包衣胡萝卜种子自然休止角22.6°,千粒质量11.34 g,种子流动性较好,取=6tan;包衣胡萝卜种子外形较圆整,且千粒质量较小,取1=1.8;试验时受到的振动或冲击较小,取2=1.6;排种盘取试验时最高转速30 r/min;型孔直径取理论最小值1.47 mm;按内圈型孔所在圆周半径取87.5 mm;按种子宽度尺寸取大值1.65 mm;由式(1)可计算得到Hmax=1.5×103Pa。因此,试验时气室实际真空度必须大于1.5 kPa。
2.1.2 投种过程分析
种子随着排种盘转到投种区后,由于投种区负压气室被隔断,种子受到的吸附力消失,仅受自身重力、离心力和空气阻力的作用,种子沿型孔圆周切线方向做抛物线运动。因种子粒径较小,在此忽略空气阻力的作用,投种过程运动学分析如图3所示。

注:r1、r2分别为外、内圈型孔所在圆周半径,mm;v1、v2分别为外、内圈种子脱离型孔时的线速度,m·s-1;v1x、v2x分别为v1、v2的水平分速度,m·s-1;v1y、v2y分别为v1、v2的竖直分速度,m·s-1;H1、H2分别为外、内圈种子脱离型孔时的离地高度,mm;L1、L2分别为外、内圈种子触地时的水平位移,mm;DL为外、内圈种子脱离型孔时的水平距离差,mm;Lx为外、内圈种子触地时的水平距离差,mm;θ1、θ2分别为外、内圈种子脱离型孔处的法线与水平线的夹角,(°);ω为排种盘角速度,rad·s-1;νm为播种机作业速度,m·s-1。
外圈种子脱离型孔时的速度为

1时间内种子从脱离型孔到触地的水平和竖直运动距离为

联立式(2)和(3)有:

同理,可得到内圈种子触地时的水平位移:

内、外圈种子触地时的水平距离为

由公式(4)~(6)可知,种子从离开型孔到触地的运动轨迹,与排种器转速、型孔所在圆周半径和投种高度等因素有关,在设计排种器离地高度及开沟分种装置时应予以考虑。
2.1.3 排种盘的设计
由吸种、投种过程分析可知,排种盘的型孔直径影响种子受力及气室临界真空度,决定种子在排种器中的运动状态。排种盘直径影响种子的离心力、种子触地水平位移及排种器整体尺寸。通常, 型孔直径根据种子尺寸确定[18],即
=(0.64~0.66)(7)
式中为种子平均宽度,mm。
试验选用山东地区广泛采用的“红喜三红七寸”胡萝卜种子,使用青岛农业大学研发的HYN-II型种子包衣机进行包衣,从中随机抽取100粒包衣种子,用精度为0.02 mm的游标卡尺测量种子的宽度尺寸,做出概率分布直方图,如图4所示。由图4可知,种子宽度尺寸范围为2.3~3.3 mm,计算得到排种盘型孔直径为1.47~2.18 mm。

图4 种子宽度尺寸概率分布直方图
借鉴现有蔬菜排种盘结构尺寸[19],确定采用厚度1.0 mm、直径220 mm的不锈钢排种盘。为实现一垄双行,行距110~150 mm的胡萝卜种植要求,排种盘设计2圈型孔,型孔交错排列成三角形,以利于种子均匀分布[20-21]。考虑排种器左壳体气道空间、清种位置及型孔尺寸要求,确定内、外圈型孔所在圆半径2为87.5 mm、1为95 mm。
在播种机作业速度一定的情况下,排种盘转速影响种子的离心力及投种状态,与排种型孔数共同决定播种作业效率。增加型孔数量可降低种子的线速度,有利于提高吸种性能,但会增加风机的风量损耗。排种盘型孔数量计算公式[22]为

式中d为排种盘型孔所在圆周直径,mm;为地轮滑移系数;ν为播种机作业速度,m/s;ν为排种盘型孔处的线速度,m/s;为株距,mm。
通常,胡萝卜株距为60~100 mm,播种机作业速度为0.83~1.39 m/s(3~5 km/h),滑移系数一般为0.05~0.12[22],排种盘型孔处的线速度一般小于0.35 m/s[22],根据参考文献[22]并结合预试验,本文取0.08,ν取0.32 m/s,由公式(8)得,排种盘种型孔数为17~47。综合考虑排种盘转速和充种性能等,确定排种盘每圈型孔数为30个。
2.1.4 刮种器设计
上刮种器一般有杠杆式、橡皮刮板式、锯齿形等,本文上刮种器对内、外圈型孔上侧吸附的多余种子进行清除,采用锯齿形(如图5所示),锯齿形对种子多次间断撞击,刮种效果较好[18]。

1.排种盘 2.锯齿刮板 3.调节手柄 4.刻度盘
1.Seed-metering plate 2.Saw-tooth scraper 3.Adjusting handle 4.Dial plate
注:1为调节手柄转动点;2为调节手柄弧槽所在圆的圆心;1为调节手柄偏心距,mm;L为锯齿刮板锯齿段弧长,mm;3为锯齿刮板滑动销,4为锯齿刮板转动销;3为调节手柄弧槽半径,mm;4为调节手柄外圆半径,mm。
Note:1is rotation point of the adjustment handle;2is center of the circle where the curved groove of the adjustment handle is located;1is eccentricity of the adjustment handle, mm;Lis arc length of the sawtooth section of the sawtooth scraper, mm;3is sliding pin of the sawtooth scraper,4is rotation pin of the sawtooth scraper;3is radius of the curved groove of the adjustment handle, mm;4is the outer radius of the adjustment handle, mm.
图5 上刮种器结构示意图
Fig.5 Schematic structure of upperseedscraping device
锯齿刮板上有2个圆柱销3和4,3为滑动销,可在刻度盘直槽内滑动,4为转动销。调节手柄弧槽所在圆为偏心圆,圆心2与转动点1的距离为1,在此取值2.5 mm,逆时针转动调节手柄时,弧槽到1的距离变小,带动圆柱销3在刻度盘直槽内向右上滑动,即锯齿刮板远离排种盘型孔,反之靠近型孔。锯齿刮板锯齿段弧长L设计为50 mm。
下刮种器对内、外圈型孔下侧吸附的多余种子进行清除,采用偏心刮种装置(如图6所示),偏心距2取值2 mm,通过旋转调节旋钮使偏心刮种刀接触吸附的多余种子,刮种刀接触端设计成圆锥形,锥面对不同粒径的种子适应性好。排种盘内外圈型孔圆心距为7.5 mm,据此刮种刀小端直径1设计为2.5 mm,大端直径2设计为5 mm。固定套固定在排种器右壳体上,为了不使调节旋钮接触壳体,固定套与调节旋钮的最小间距2应大于右壳体壁厚。同时,刮种刀大端面与固定套的最大间距1应大于排种盘到右壳体的距离,使大端面在弹簧的张紧力作用下紧贴排种盘,工作时拨动调节旋钮使刮种刀斜面接触种子。

1.刮种刀 2.固定套 3.张紧弹簧 4.调节旋钮
1.Scraper 2. Adapter sleeve 3. Tightener spring 4.Adjusting knob
注:1为刮种刀小端直径,mm;2为刮种刀大端直径,mm;2为刮种刀偏心距,mm;1为刮种刀大端面与固定套的最大间距,mm;2为固定套与调节旋钮的最小间距,mm。
Note:1is diameter of the small end of the seed picking knife, mm;2is diameter of the large end of the seed picking knife, mm;2is eccentricity of the seed picking knife, mm;1is the maximum distance between the large end of the seed picking knife and the adapter sleeve, mm;2is the minimum distance between the adapter sleeve and the adjusting knob, mm.
图6 下刮种器结构示意图
Fig.6 Schematic structure of lowerscraping device
2.2 风机选型与参数确定
作业时,拖拉机动力输出轴通过万向节带动风机工作,使排种器真空室产生负压,把种子吸附在型孔上;地轮转动,通过链轮、链条传动系统带动排种器转动。
离心式风机风量大、风压小,适于同时为多个排种器提供风量。此类风机技术成熟,本文确定风机参数后直接从外厂采购。风机由拖拉机万向输出轴提供动力,为排种器提供正、负气压,通过调节阀门开度控制气压大小。田间试验拟选用的拖拉机万向输出轴转速有540和1 000 r/min两档,由于风机出厂已通过皮带传动提速,无需再进行传动比设计,按风机使用说明书选择对应档位即可。
根据公式(1)计算气室临界真空度值,结合排种器性能试验,当气室负压为4.4 kPa时,排种器作业性能良好。气室负压为5 kPa时,风量为7.4×10-3m3/s[23],风机同时为2个排种器提供风压,所需风量为
Q=21(9)
式中z为排种器所需总风量,m3/h;为风量泄漏系数,=1.05;1为单个排种器所需风量,m3/h。
风机所需的轴功率[24]为

式中P为风机所需的轴功率,kW;为风机所需的总风压,Pa;0为风机内效率,一般为0.75~0.85[24],本文取0=0.75;1为机械传动效率,本文风机采用平带传动,取1=0.85[24]。
由式(9)和式(10)可知,该播种机所需风机的总风量为56 m3/h,风机的轴功率为0.23 kW,考虑到播种通用性及扩展性,本文选用的风机为FL-2.5型播种机通用风机,轴功率2.5 kW。
2.3 起垄整形装置设计
起垄整形装置主要由起垄犁和整形装置组成。起垄犁采用双翼结构,通过U型螺栓固定在机架上,根据垄距调整起垄犁间距。整形装置由柱形镇压辊与锥形辊组成。锥形辊可以根据垄距、垄面宽调整间距。作业时,土垡沿起垄犁两侧对称的曲面先上升一定高度后再翻转到两侧垄面,并在鼓形辊的镇压下形成播种垄。
根据开沟筑梗犁设计方法,结合胡萝卜垄型参数,起垄犁犁体曲面尺寸按下式确定[18]:

式中为犁体高度,mm;为垄高,mm;为犁体宽度,mm;为沟底宽,mm;2为修正系数,2≥1.1[18];为垄床底角,一般在50°~70°之间[25-26];L为垄面宽,mm;L为垄底宽,mm。根据山东省莱西市(试验地)的胡萝卜种植起垄要求,即=200 mm,L=300 mm,L=480 mm,=120 mm,代入式(11)求得=260 mm,65°,=340 mm,如图7所示。
双翼式犁体导曲线位于犁体曲面的对称中线处,是控制水平直元线位置的指导线,通常由3个线段组成,即起始端直线段S,挖深以下曲线段和挖深以上线段,挖深以下曲线有抛物线和对数螺线等形式。本研究选择适用于较黏重土壤的抛物线形式,挖深以下为抛物线,挖深以上部分为该抛物线的平滑延伸线。
挖深处的抛物线开度

式中0为起土角,0=25°;α为挖深处的起土角,α≤(90°−);为土壤对钢的摩擦角,(°);3为修正系数,3=1~1.2[18],取小值时沟壁较为坚实,但阻力较大,此处取3=1.1。将=150 mm代入公式(12)计算得,挖深处的抛物线开度x为151 mm,起始端直线段长度S取60 mm,然后采用包络作图法绘制成抛物线。
为了避免土壤在犁壁下部向沟壁位移,挤压沟壁,增加阻力和造成壅土现象,铧式犁犁体曲面的元线角应有规律变化。起始元线角0应较大,取0=60°,且在一定高度内保持不变,以利于土壤沿着犁体曲面上移,随后元线角逐渐减小,在挖深处至最小值γ,取γ=15°,这样有利于土壤侧移。挖深处以上元线角随犁体高度增加而增大,这样有利于翼部翻垡压埂,元线角变化规律曲线由2段构成。
挖深处以下的元线角变化规律:
挖深处以上的元线角变化规律:

式(13)和(14)中,为和a的差值,(°);0为0和a的差值,(°);为元线距导曲线始端(直线段末端)的垂直高度,mm;为挖深,mm;0为导曲线始端直线段末端垂直高度,mm;为元线距挖深处的垂直高度,mm。
为避免整形装置质量大而过分压实垄面土壤,柱形辊直径d设计较小,为160 mm。同时,为避免整形装置两侧锥形辊接触垄沟底部造成柱形镇压辊脱离垄面,失去镇压效果,应控制锥形辊大端直径D,D=490 mm。起垄整形装置结构如图7所示。

注:H为犁体高度,mm;C为犁体宽度,mm;c为沟底宽,mm;La为垄距,mm;Lt为垄面宽,mm;Lb为垄底宽,mm;a为挖深,mm;h为垄高,mm;dt为柱形辊直径,mm;Dt为锥形辊大端直径,mm;θ为垄床底角,(°)。
2.4 开沟分种装置设计
胡萝卜种子胚小,顶土能力弱,播深应控制在10~20 mm,一垄双行,行距110~150 mm。针对此农艺要求,结合各开沟器的特点,基于现有的滑刀式开沟器设计一种集开沟和分种一体的装置。该装置左右各有一套开沟器,前后错位排列,作业时开沟器以钝角入土,侧板向两侧挤压土壤形成种沟,不会因为土壤反转造成干、湿土混合,开出的种沟呈“V”字型,沟宽度小、深度低,种子落入种沟后,种子和土壤接触紧密,有利于发芽。开沟器的刃口曲线是决定切土性能的关键因素,刃口曲线通常为抛物线函数或指数函数[27-28]。为了便于加工制造,方便控制刃口曲线的形状,本文选取抛物线函数曲线作为刃口曲线。
设滑刀刃口曲线方程为:
0=2(15)
刃口曲线上任意点点与点的斜率为:

式中1为刃口曲线在点的斜率,2为刃口曲线在点的斜率。点的坐标为(11),点的坐标为(22),、两点的垂直距离为

联立式(16)和式(17)有:

代入式(15)得刃口曲线方程为

从式(19)可以看出,刃口曲线与滑刀高度和滑切角有关。设计时为保证滑刀的入土性能,需满足滑切条件,起始滑切角θ应大于摩擦角(=14°~38°),在此摩擦角取23°[29],则θ>23°,因θ=90°−B,所以θ<67°,即滑切角的取值范围为23°<<67°。根据顾耀权等[27]的研究,滑切角在35°~55°时入土性能较好,刃口曲线按这一取值范围设计。
开沟器作业时,被切割的土壤颗粒沿刃口的两斜面向后滑移,以刃口斜面上任一土壤颗粒为研究对象,进行受力分析,土壤颗粒向后滑移的条件是:1>,即tan(90°−1/2)>tan1,所以有1<180°−21134°,又根据Kostritsyn[30]理论,切削阻力在刃口角1=45°时最小,在此1设计成45°。
开沟器侧板尾部一般设计成阶梯形或斜口,能防止沟壁上层干土先落入沟底覆盖种子,干土覆盖种子不利于种子吸收水分和发芽。一器双行排种器分种管一般设计为叉形[31-32],本文分种管设计为倾斜U型槽结构,焊接在开沟器侧板上,左右对称、前后错位布置,排种盘上外内圈型孔上的种子从连接板中间方孔分别落入左右分种管,分种管将改变种子运动方向,使其由前后向左右运动,实现窄距双行播种。由试验测得包衣胡萝卜种子的休止角为22.6°,故分种装置倾斜角1>22.6°,在此设计成40°。开沟分种装置结构如图8所示。
由上文分析可知降低投种高度能减小种子触底位移量,本文开沟分种装置总体高度h约100 mm,分种管离地间隙小,为避免分种管触地损坏及壅土,在分种管下部加装一弧形底板。
2.5 覆土器设计
现有的覆土器主要有单圆盘式、双圆盘式、拖链式、刮板式、弹齿式等,刮板式常在玉米、大豆、谷子等中耕作物播种机上使用[33-34]。胡萝卜种子覆土厚度1~2 cm,要求一次性完成覆土、镇压作业。覆土量过大会引起土壤流动速度大,从而影响覆土厚度和播种均匀性;同时也将造成干湿土混合覆盖种子,影响种子发芽[35-36],这就要求设计一种与胡萝卜种植农艺相适应的覆土器。

1.滑刀2.侧板3.连接板4.分种管5.底板
1. Sliding knife 2.Side board 3. Connection board 4. Seed-guiding tube 5. Bottom board
注:为土壤颗粒受到的摩擦力,N;为土壤颗粒受到滑刀的压力,N;1为压力沿刃口斜面的分力,N;2为压力在前进速度方向的分力,N;1为刃口角,(°);1为土壤与刀刃的摩擦角,(°);1为分种管倾斜角,(°)。
Note:is the friction force on soil particles, N;is the normal pressure of sliding knife on the soil, N;1is the component of pressurealong the slope of the sliding knife edge, N;2is the component of pressure in the direction of forward speed, N;1is the sliding knife edge angle, (°);1is the friction angle between soil and sliding knife edge, (°);1is the inclination angle of the seed-guiding tube, (°).
图8 开沟分种装置结构及正视图方向的土壤颗粒受力分析
Fig.8 Structure ofditching and seeding device and stress analysis of soil particles in the direction of front view
本文采用的刮板式覆土器在传统八字形刮板式覆土器基础上进行了改进(如图9所示),主要由2块角度和高低都可调的刮板组成,角度调节范围θ为0°~37°。刮板上端用弹簧连接,弹簧拉力使刮板紧贴地面,作业时可随地形浮动。刮板尾部向上倾斜以增大接触面积,并向内侧折弯,刮板随着播种机向前运动时,刮板内侧面把种沟两侧的土壤推入种沟内,调节刮板角度可以获得不同的覆土量。2片刮板分别安装在播种单体两侧,间距S= 150 mm,刮板长度L=270 mm,刮板宽度W=30 mm,刮板折弯角度α=145°。

1.机架 2.弹簧 3.刮板 4.拉力调整板
1. Body frame 2.Spring 3. Scraper 4. Tension adjustment plate
注:L为刮板长度,mm;W为刮板宽度,mm;S为两刮板间距,mm;θ为刮板与水平线夹角,(°);α为刮板折弯角,(°)。
Note:Lis length of the scraper, mm;Wis width of the scraper, mm;Sis distance between the two scrapers, mm;θis the angle between the scraper and the horizontal line, (°);αis the bending angle of the scraper, (°).
图9 覆土器结构示意图
Fig.9 Schematic structure of soil coverer
3 排种性能试验
试验采用与上述种子物理特性测定试验同品种的包衣胡萝卜种子,千粒质量11.34 g,含水率3.81%。依据GB/T 6973-2005《单粒(精密)播种机试验方法》规定的试验方法和指标,选取合格率、重播率、漏播率为评价指标,进行气吸式胡萝卜起垄播种一体机的田间生产试验评价。播种粒距合格率、重播率、漏播率的计算方法如下:
1)播种粒距合格率
式中0为播种粒距合格率,%;0为粒距合格种子数;为测量的种子总数。
2)重播率

式中1为重播率,%;1为重播的种子数。
3)漏播率

式中2为漏播率,%;2为漏播的种子数。
3.1 室内试验
在JPS-12型排种器性能检测试验台对型孔直径、排种盘转速、气室负压和吹杂正压进行单因素试验,每个水平重复3次,每次试验选取100粒种子,试验结果如表3所示。
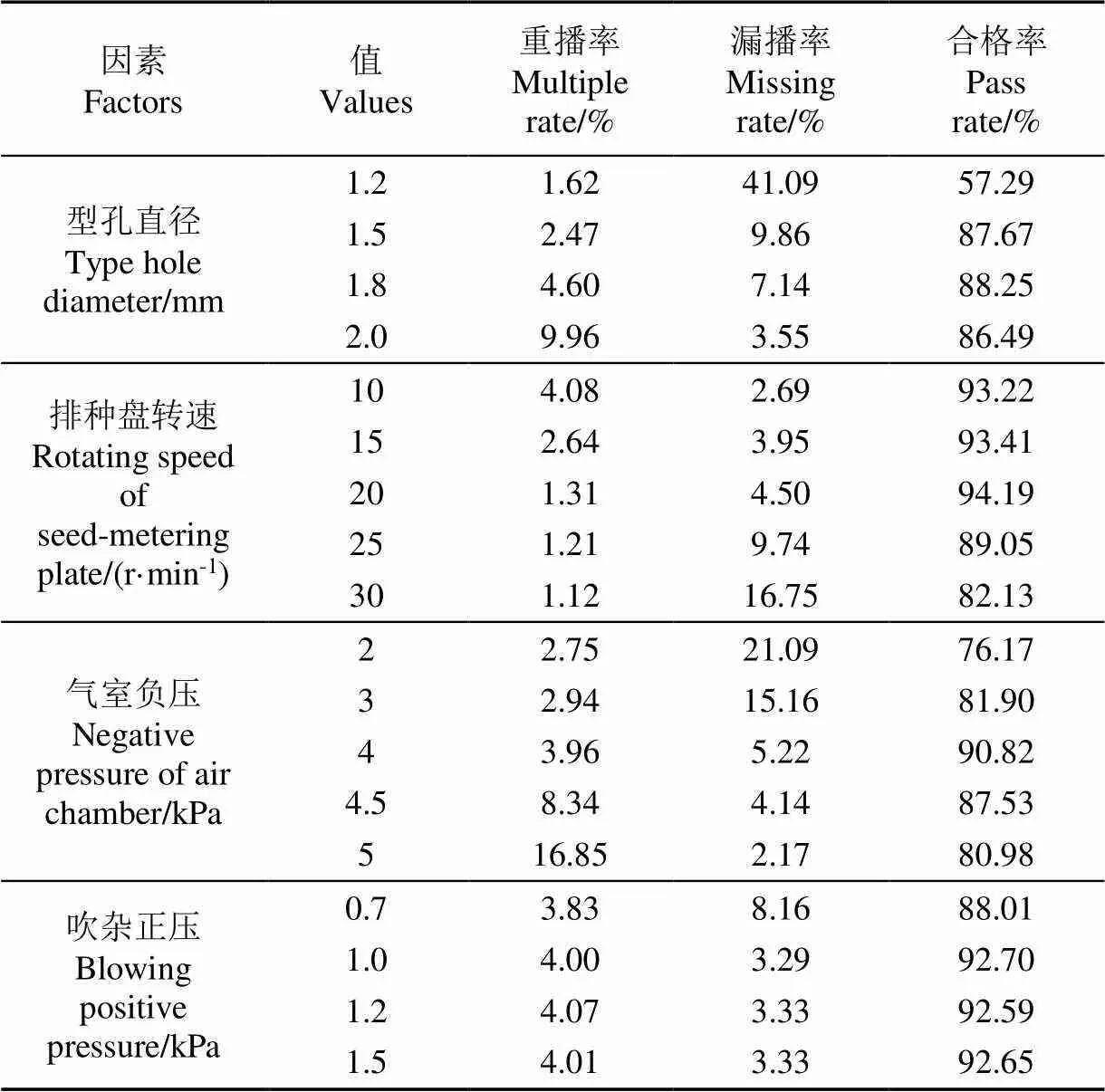
表3 单因素试验结果
注:因素为型孔直径的试验条件:排种盘转速25 r·min-1,气室负压4 kPa,吹杂正压1 kPa;因素为转速的试验条件:型孔直径1.8 mm,气室负压4 kPa,吹杂正压1 kPa;因素为负压的试验条件:型孔直径1.8 mm,排种盘转速25 r·min-1,吹杂正压1 kPa;因素为正压的试验条件:型孔直径1.8 mm,排种盘转速25 r·min-1,气室负压4 kPa。
Note: Test conditions with the factor of type hole diameter: rotating speed of seed-metering plate is 25 r·min-1,negative pressureof air chamber is 4 kPa, blowing positive pressure is 1 kPa; Test conditions with the factor if rotating speed: type hole diameter is 1.8 mm,negative pressureof air chamber is 4 kPa, blowing positive pressure is 1 kPa; Test conditions with the factor of negativepressureof air chamber: type hole diameter is 1.8 mm,rotating speed of seed-metering plate is 25 r·min-1, blowing positive pressure is 1 kPa; test conditions with the factor of blowing positivepressure: type hole diameter is 1.8 mm,rotating speed of seed-metering plate is 25 r·min-1, negative pressureof air chamber is 4 kPa.
由单因素试验结果可知:随着排种盘型孔直径、排种盘转速和气室负压的变化,重播率、漏播率和合格率变化范围较大;当吹杂正压≥1 kPa时,重播率、漏播率和合格率变化范围较小,因此不考虑。为寻求排种盘型孔直径、排种盘转速和气室负压3个因素的最佳参数组合,以排种粒距合格率、漏播率和重播率为评价指标,进行三因素五水平的二次回归正交旋转组合试验[37]。根据单因素试验结果确定试验因素水平设置,因素水平及编码见表4,试验方案及试验结果见表5。

表4 试验因素水平

表5 试验方案及试验结果
运用Design Expert 8.0.6软件对试验结果进行方差分析,结果见表6~表8。由表6~表8可知,重播率1的回归模型中,回归项1、3、23、12、22、32对方程影响显著(<0.05),其余项影响不显著(>0.05)。漏播率2的回归模型中,回归项1、2、3、12、22、32对方程影响显著(<0.05),其余项影响不显著(≥0.05)。合格率3的回归模型中,回归项1、2、3、12、22、32对方程影响极显著(<0.05);而其余项影响不显著(≥0.05)。剔除不显著项,回归方程为




表6 重播率方差分析
注:<0.01表示极显著;<0.05表示显著;>0.05表示不显著。下同。
Note:<0.01 means highly significant;<0.05 means significant;>0.05 means not significant. The same below.

表8 合格率方差分析
为明确各试验参数的最佳组合,运用Design Expert 8.0.6软件对性能指标进行优化求解,其目标函数和试验参数的约束范围为

由此求得各试验参数的优化组合为:型孔直径1.6 mm,排种盘转速18 r/min,气室负压4.4 kPa,此时目标函数预测值分别为:重播率1.03%、漏播率3.04%、合格率95.93%。采用上述优化获得的最佳参数组合进行台架验证试验,试验重复3次并取平均值作为试验验证值,试验结果分别为:重播率1.52%、漏播率3.23%、合格率95.25%。重播率、漏播率和合格率的试验验证值与回归模型预测值基本一致,且均达到了设计要求。
3.2 田间试验
2019年10月,在山东省莱西市店埠镇进行样机播种适应性试验和性能试验。试验用种子品种和参数与室内台架试验相同。试验地块长100 m,宽30 m,旋耕整地,土质为壤土,土壤含水率为18.2%,土壤坚实度为869 kPa,牵引拖拉机为昊田604,功率为44 kW,设置播种机的理论株距为70 mm。试验现场见图10。
播种机风机由拖拉机输出轴带动,为2个排种器提供气压。播种时根据室内试验最佳参数,把气室负压调节到4.4 kPa,吹杂正压调节到1 kPa,选择型孔直径为1.6 mm的排种盘。由于排种器由地轮驱动,变速箱控制,播种机作业速度直接影响排种器转速,为此分别在3、4、5 km/h的作业速度下进行播种试验,每种速度播种6垄。为方便测量数据,播种后,每种作业速度随机选取3垄进行测量,选取中间段测量数据,每种作业速度测量3组数据,每组测量100个种子间距,总共得到9组数据,根据数据计算出粒距合格率、重播率和漏播率,结果如表9。由表9可以看出,随着作业速度提高,合格率变化较小,重播率有所下降,漏播率有所上升,但总体变化范围不大;样机播种效果良好,漏播率小于5%,重播率小于4%,播种粒距合格率大于94%,各项指标均符合JB/T 10293-2013《单粒(精密)播种机技术条件》的要求。与王晋[6]研制的胡萝卜播种机相比,粒距合格率和播深均匀性有一定提升,重播率和漏播率相当。垄形尺寸与设计值基本一致,垄面平整,无大土块,平均播深14 mm,满足胡萝卜播种要求。

1.风机 2.机架 3.地轮 4.镇压轮 5.覆土器 6.传动装置 7.排种器 8.整形装置

表9 田间试验结果
4 结 论
1)本文研制的气吸式胡萝卜播种机,可以一次完成起垄、开沟、精量播种、覆土、镇压等作业工序。播种单体前端设计的起垄装置,采用内外2圈型孔排种盘,通过开沟分种装置实现开沟与分种融合,满足胡萝卜窄行播种的农艺要求。
2)对排种器吸种及投种过程的种子受力及运动分析,得出排种器临界气压计算公式,明确吸种力、投种位置及播种株距的主要影响因素,结合试验确定排种器的气室真空度为4.4 kPa;确定排种盘内外圈型孔所在圆周半径分别为87.5和95.0 mm,型孔直径为1.6 mm,一圈型孔数量为30个;依据清种要求及作业空间,设计锯齿刮板式及偏心式刮种器,2片刮板分别安装在播种单体两侧,间距150 mm,刮板长度270 mm,刮板宽度30 mm,刮板折弯角度145°;对起垄整形装置进行理论分析,得出犁体及整形辊结构参数;基于传统滑刀式开沟器,分析了刃口曲线、滑切角、刃口角参数,设计了开沟分种一体装置,装置总体高度约100 mm,柱形辊直径160 mm锥形辊大端直径490 mm。
3)田间试验表明,起垄整形装置做出的梯形垄满足种植要求,播种机按所设计的株距作业后,粒距合格率大于94%,重播率小于4%,漏播率小于5%,播深均匀,平均播深14 mm,试验结果符合国家精密播种标准。
[1]管春松,崔志超,高庆生,等. 蔬菜精量直播技术及装备的研究现状[J]. 中国蔬菜,2018(12):9-15.
[2]Mustafa Nevzat Ornek, Ali Yavuz Seflek, Haydar Haciseferogullari. Performance of pneumatic precision seed drill in black carrot sowing[J]. Pakistan Journal of Agricultural Sciences, 2018, 55(3): 639-645.
[3]李洪昌,高芳,赵湛,等. 国内外精密排种器研究现状与发展趋势[J]. 中国农机化学报,2014,35(2):12-16,56.
Li Hongchang, Gao Fang, Zhao Zhan, et al. Domestic and overseas research status and development trend of precision seed metering device[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 12-16, 56. (in Chinese with English abstract)
[4]杨薇,李建东,高波,等. 胡萝卜种植与收获机械化的现状与思考[J]. 农机化研究,2014(12):247-252.
Yang Wei, Li Jiandong, Gao Bo, et al. Research status and thinking of the mechanization of planting and harvesting carrot[J]. Journal of Agricultural Mechanization Research, 2014(12): 247-252. (in Chinese with English abstract)
[5]李凯锋,杨炳南,杨薇,等. 国内外胡萝卜种植现状及播种机研究进展[J]. 农业工程,2015,5(1):1-5.
Li Kaifeng, Yang Bingnan, Yang Wei, et al. Planting status and research progress on seeding machine of carrot at home and abroad[J]. Agricultural Engineering, 2015, 5(1): 1-5. (in Chinese with English abstract)
[6]王晋. 胡萝卜播种机的研制[D]. 哈尔滨:东北农业大学,2012.
Wang Jin. Research and Manufacture of the Carrot Seeding machine[D]. Harbin: Northeast Agricultural University, 2012. (in Chinese with English abstract)
[7]王海,赵武云,戴飞. 电动双行胡萝卜播种机的研制与试验[J]. 中国农机化学报,2016,37(6):4-9.
Wang Hai, Zhao Wuyun, Dai Fei. Design and test of the motor-driven double row carrot seeder[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(6): 4-9. (in English with Chinese abstract)
[8]王家胜,尚书旗. 基于种子带模式小区精密播种装备的研制[J]. 农业工程学报,2012,28(增刊2):65-71.
Wang Jiasheng, Shang Shuqi. Development of plot precision planter based on seed tape planting method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.2): 65-71. (in English with Chinese abstract)
[9]袁鹏飞,张俊才,田治远. 2HBJ-4型胡萝卜精量播种机的研究与分析[J]. 农业机械,2013(7):120-121.
[10]胡童,齐新丹,李骅,等. 国内外蔬菜播种机的应用现状与研究进展[J]. 江西农业学报,2018,30(2):87-92.
Hu Tong, Qi Xindan, Li Hua, et al. Application status and research progress of vegetable seeder in China and foreign countries[J]. Acta Agriculturae Jiangxi, 2018, 30(2): 87-92. (in Chinese with English abstract)
[11]应芳卿. 胡萝卜新品种郑参一号的选育及栽培技术研究[D]. 郑州:河南农业大学,2010.
Ying Fangqing. Studies on Breeding and Cultivation of Zhengshen 1 New Variety of Carrot[D]. Zhengzhou: Henan Agricultural University, 2010. (in Chinese with English abstract)
[12]王坤. 寿光化龙胡萝卜高效栽培技术[J]. 北方园艺,2014(22):56-57.
[13]刘歧茂,丁永青,迟瑞苹,等. 设施胡萝卜产业化安全高效栽培技术[J]. 中国蔬菜,2018(1):92-94.
[14]刘朋,陈照先. 胡萝卜栽培技术[J]. 现代农业科技,2010(21):122-123.
[15]程习峰.胡萝卜种植栽培实用技术[J]. 农民致富之友,2016(19):15.
[16]方志鹏. 出口胡萝卜栽培技术[J]. 福建农业科技,2010(1):40-41.
[17]李林. 气吸式排种器理论及试验的初步研究[J]. 农业机械学报,1979,10(3):56-63.
Li Lin. A preliminary study on the theory and experiment of the suction-type metering device for precision drill[J]. Transactions of the Chinese Society for Agricultural Machinery, 1979, 10(3): 56-63. (in Chinese with English abstract)
[18]中国农业机械化科学研究院. 农业机械设计手册:上册[M].北京:中国农业科学技术出版社,2007.
[19]段宏兵. 几种国外小粒种子气吸式精密排种器的结构分析[J]. 中国农机化,2008(2):87-89.
Duan Hongbing. The structure analysis of the precision seed-metering device of many kinds of the small seeds of foreign country[J]. Chinese Agricultural Mechanization, 2008(2): 87-89. (in Chinese with English abstract)
[20]李艳华,张鹏,吴国良,等. “双行交错”种植方式玉米干物质积累动态变化的研究[J]. 山东农业科学,2011(6):35-38.
Li Yanhua, Zhang Peng, Wu Guoliang, et al. Research on dynamic variation of dry matter accumulation in maize cultivated by double-row inter⁃laced planting method[J]. Shandong Agricultural Sciences, 2011(6): 35-38. (in Chinese with English abstract)
[21]陈美舟,刁培松,张银平,等. 大豆窄行密植播种机单盘双行气吸式排种器设计[J]. 农业工程学报,2018,34(21):8-16.
Chen Meizhou, Diao Peisong, Zhang Yinping, et al. Design of pneumatic seed-metering device with single seed-metering plate for double-row in soybean narrow-row-dense-planting seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(21): 8-16. (in Chinese with English abstract)
[22]张开兴,李金凤,宋正河,等. 变粒径双圆盘气吸式精量排种器优化设计与试验[J]. 农业机械学报,2019,50(6):52-63.
Zhang Kaixing, Li Jinfeng, Song Zhenghe, et al. Optimum design and test of variable diameter double disc air suction precision seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(6): 52-63. (in Chinese with English abstract)
[23]苏微,王福林,陈海涛,等. 气吸式播种机气力系统研究[J]. 东北农业大学学报,2012,43(5):61-64.
Su Wei, Wang Fulin, Chen Haitao, et al. Study on pneumatic system of vacuum seed planter[J]. Journal of Northeast Agricultural University, 2012, 43(5): 61-64. (in Chinese with English abstract)
[24]王丰. 气吸式精量播种机风机性能研究[D]. 大庆:黑龙江八一农垦大学,2019.
Wang Feng. Study on the Performance of the Air-Suction Precision Seeder Fan[D]. Daqing: Heilongjiang Bayi Agricultural University, 2019. (in Chinese with English abstract)
[25]何进,李洪文,张学敏,等. 1QL-70型固定垄起垄机设计与试验[J]. 农业机械学报,2009,40(7):55-60.
He Jin, Li Hongwen, Zhang Xuemin, et al. Design and experiment of 1QL-70 bed former for permanent raised beds[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(7): 55-60. (in Chinese with English abstract)
[26]高庆生,胡桧,陈清,等. 我国设施蔬菜机械化起垄技术应用现状及发展趋势[J]. 中国蔬菜,2016 (5):4-7.
[27]顾耀权,贾洪雷,郭慧,等. 滑刀式开沟器设计与试验[J].农业机械学报,2013,44(2):38-42.
Gu Yaoquan, Jia Honglei, Guo Hui, et al. Design and experiment of sliding knife furrow openner[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(2): 38-42. (in Chinese with English abstract)
[28]贾洪雷,郑嘉鑫,袁洪方,等. 仿形滑刀式开沟器设计与试验[J]. 农业工程学报,2017,33(4):16-24.
Jia Honglei, Zheng Jiaxin, Yuan Hongfang, et al. Design and experiment of profiling sliding-knife opener [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33 (4): 16-24(in Chinese with English abstract)
[29]赵淑红,谭贺文,王加一,等. 多功能集成式播种开沟器的设计与试验[J]. 农业工程学报,2018,34(11):58-67.
Zhao Shuhong, Tan Hewen, Wang Jiayi, et al. Design and experiment of multifunctional integrated seeding opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 58-67. (in Chinese with English abstract)
[30]西涅阿科夫·潘诺夫. 土壤耕作机械的理论和计算[M]. 北京:中国农业机械出版社,1981.
[31]冯利臻,陈立东,何堤,等. 单盘双条精密播种机“零速”衩形导种管的设计[J]. 农机化研究,2008(10):84-86.
Feng Lizhen, Chen Lidong, He Di, et al. Design of zero speed and two-legs-type seed tube of the air-suction seed metering device[J]. Journal of Agricultural Mechanization Research, 2008(10): 84-86. (in Chinese with English abstract)
[32]李玉环,杨丽,张东兴,等. 豆类作物一器双行气吸式高速精量排种器设计与试验[J]. 农业机械学报,2019,50(7):61-73.
Li Yuhuan, Yang Li, Zhang Dongxing, et al. Design and experiment of pneumatic precision seed-metering device with single seed-metering plate for double-row[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(7): 61-73. (in Chinese with English abstract)
[33]王未,马旭,袁锐,等. 基于均匀设计的种子弹跳滚动位移的试验研究[J]. 吉林农业大学学报,2006,28(6):694-696,701.
Wang Wei, Ma Xu, Yuan Rui, et al. Experimental study on displacement of seed bounce and rolling based on uniform design[J]. Journal of Jilin Agricultural University, 2006, 28(6): 694-696, 701. (in Chinese with English abstract)
[34]侯华铭,崔清亮,张燕青,等. 2BZ-2 型谷子精少量播种机的研制[J]. 农业工程学报,2017,33(13):16-22.
Hou Huaming, Cui Qingliang, Zhang Yanqing, et al. Development of 2BZ-2 type fine and small-amount seeder for foxtail millet[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(13): 16-22. (in Chinese with English abstract)
[35]李丽艳,王景立. 精密播种机覆土器研究现状分析[J]. 农业与技术,2016,36(13):42-44,83.
[36]邴政. 大豆播种机覆土器仿生优化设计及其分析[D]. 长春:吉林大学,2017.
Bing Zheng. Bionic Optimization Design and Analysis on Soil Coverer of Soybean Seeder[D]. Changchun: Jilin University, 2017. (in Chinese with English abstract)
[37]刘振学,王力. 实验设计与数据处理[M]. 北京:化学工业出版社,2015.
Development of air-suction ridging and seeding machine for carrot
Wang Fangyan, Yang Liang, Bao Yufeng, Jiang Jingtao※
(,,266109,)
Combineding with the ridge planting mode of carrot in Shandong and other places, this research developed a air-suction precision carrot seeder which integrated the functions of ridging, ditching, precision sowing, covering soil and pressing was developed. The machine was mainly composed of air-suction precision metering device, ridging and shaping device, ditching and seed dividing device, soil covering device, frame and transmission system. According to the analysis of the force and movement of seeds in the process of seed suction and seeding, the critical value of vacuum degree in the air chamber of seed metering device was obtained, and the main influencing factors of seeding position and plant spacing uniformity were determined. A seed-metering plate with double-ring type hole was designed, the radius of the inner and outer circle holes of the seed-metering plate was 87.5 and 95.0 mm respectively, and the number of holes in each circle was 30. According to the requirements of seed cleaning and working space, the upper scraper removed the excess seeds adsorbed on the upper side of the inner and outer ring type holes, the zigzag structure was adopted. The lower scraper removed the excess seeds adsorbed on the lower side of the inner and outer ring type holes, and the eccentric structure was used. According to planting agronomic requirements, the FL-2.5 fan was determined to meet the requirements of different sowing air volume. Three double-wing ridging plows were used to ridge, and the ridge shape was trimmed by a shaping device to complete 2 trapezoidal ridges at one time. According to the requirements of double narrow row, shallow ditching and less covering soil, the structure of ditching and the parameters of overburden were determined. According to the analysis of the seed feeding process, the low-level seed feeding mode was adopted, and the seed metering the overall height of the ditching and seed separation device was about 100 mm. Taking the typehole diameter of the seed-metering plate, the rotating speed of seed-metering plate and the negative pressure of the air chamber as the test factors, and taking the eligible rae of seed spacing, the missing rate and the multiple rate as the test evaluation indexes, three-factor and five-level orthogonal experiment was carried out. The best working parameter combination for seed-metering device was abtained: the type hole diameter was 1.6 mm, the rotating speed of seed-metering plate was 18 r/min, and the negative pressure of the air chamber was 4.4 kPa. The field sowing experiments were carried out at working speeds of 3, 4 and 5 km/h respectively. The experiment results showed that with the increase of working speed, the eligible rate changed little, the multiple rate decreased, and the missing rate increased, but the overall scope of change was not large, the eligible rate was more than 94%, the missing rate was less than 5%, and the multiple rate was less than 4%, the working performance of the machine met the national standard and the requirements of carrot planting agronomy. The study can provide reference for the design of precision seeder for small seed vegetables such as carrot.
agricultural machinery; design; seeder; carrot; air-suction
王方艳,杨亮,鲍余峰,等. 气吸式胡萝卜起垄播种一体机研制[J]. 农业工程学报,2020,36(17):35-45.doi:10.11975/j.issn.1002-6819.2020.17.005 http://www.tcsae.org
Wang Fangyan, Yang Liang, Bao Yufeng, et al. Development of air-suction ridging and seeding machine for carrot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(17): 35-45. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.17.005 http://www.tcsae.org
2020-06-08
2020-08-20
国家自然科学基金项目(51775290);山东省重点研发计划(2019GNC106056,2017NC212006);青岛市民生科技计划(17-3-3-52-nsh)
王方艳,博士,副教授,主要从事农业装备设计及理论研究。Email:wfy_66@163.com
江景涛,教授,主要从事新型农业装备的研发。 Email:jjtao_2518@163.com
10.11975/j.issn.1002-6819.2020.17.005
S223.2
A
1002-6819(2020)-17-0035-11
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
煤炭工程(2022年8期)2022-08-24
新疆农机化(2022年1期)2022-03-02
农业与技术(2021年21期)2021-11-17
果农之友(2021年4期)2021-06-29
建材发展导向(2021年6期)2021-06-09
天津农林科技(2020年5期)2020-10-21
E动时尚·科学工程技术(2019年11期)2019-09-10
中国科技纵横(2015年14期)2015-10-31
农机使用与维修(2014年5期)2014-09-23