
基于数据融合的ADAS系统在重卡上的研究及应用
2020-10-26 01:11安徽江淮汽车集团股份有限公司杜文龙李霞常开慧
专用汽车 2020年10期
安徽江淮汽车集团股份有限公司 杜文龙 李霞 常开慧
针对我国道路安全形势,交通运输法规对重卡ADAS系统提出了更高的要求,介绍了基于数据融合的ADAS系统在重卡上的应用开发实践,为相关产品的开发提供一种方案参考。
我国是公路货运大国,卡车货运安全关系到国计民生。频发的交通事故让社会对车辆主动安全及智能化提出了更高的要求,重卡ADAS技术的研究及应用已经成为行业的必然趋势。
随着JT/T 1178.1《营运货车安全技术条件第1部分:载货汽车》、JT/T 1178.2《营运货车安全技术条件 第2部分:牵引车辆与挂车》及JT/T 1242《营运车辆自动紧急制动系统性能要求和测试规程》的发布实施,要求法规监控范围内的重卡需具备车道偏离预警(LDW)、前碰撞预警(FCW)和自动紧急制动(AEB)功能。其中符合交通行业法规的自动紧急制动系统要求能够实现对车辆和行人的识别。基于毫米波雷达技术无法可靠实现行人的探测,而单摄像头技术无法保证相对距离的精准判断,且性能显著受制于气候条件。为保证系统可靠性,需规避单一传感器的技术先天缺陷,采用摄像头和毫米波雷达传感器进行数据融合的技术路线,将是重卡领域的一项必然趋势。
系统概述
基于数据融合的ADAS系统以前视摄像头及前向77GHz毫米波雷达为探测传感器,分别采集前方道路的采集视觉信息及雷达反射信息,再由ADAS系统中的目标识别模块进行视觉信息和雷达信息进行融合判断,最终决断出前方道路的最终信息状态。感知的最终目标用于系统决策,结合当前车辆状态输出预警或横向、纵向控制,系统功能框架如图1所示。
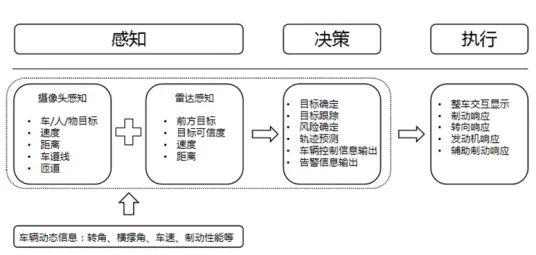
图1 ADAS系统功能框架
系统方案设计
系统用于实现符合法规要求的车道偏离预警(LDW)、前碰撞预警(FCW)和自动紧急制动(AEB),同时根据实车需求以及产品功能路线分析,同步设计实现限速标识识别(TSR)、自适应巡航控制(ACC)、车道保持辅助(LKA)等智能辅助功能。现从系统组成、功能评价以及网络拓扑设计等几个方面来进行数据融合的ADAS系统方案设计。
1.系统组成方案
基于数据融合的ADAS系统主要实现摄像头和雷达的感知以及决策处理。结合当前技术能力,有3种主流的系统方案可选择,如表1所示。其中方案1融合决策控制器是独立的模块,可安装至仪表台内部,不与造型相关,具备灵活升级的优势;方案2和方案3基于硬件资源的考虑,具备一定的成本优势。
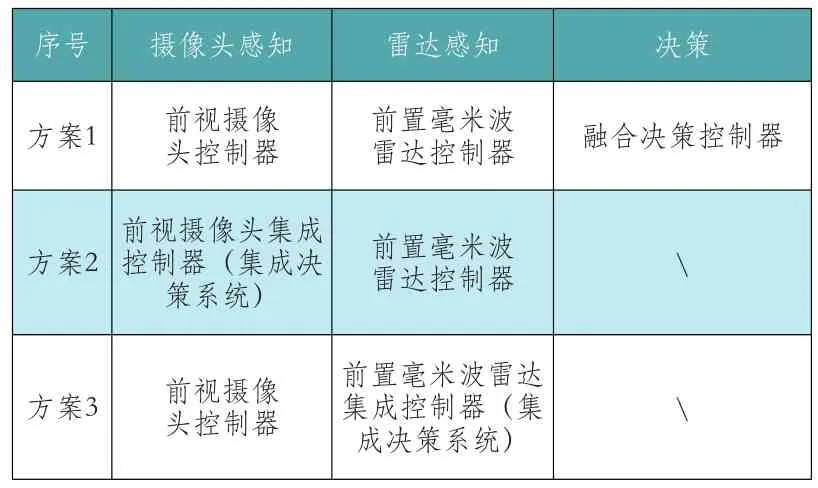
表1 数据融合ADAS系统主流方案
2.功能评价方案
数据融合ADAS系统功能分为两个部分。
a.法规项功能:车道偏离预警(LDW)、前碰撞预警(FCW)和自动紧急制动(AEB),该部分有明确的法规要求和对应的测试方法,因此法规项功能严格以对应的测试法规来评价;
b.舒适性拓展功能:限速标识识别(TS R)、自适应巡航控制(ACC)以及可继续升级拓展的车道保持辅助(LKA)功能。该部分功能在乘用车上已成熟应用,但在商用车上应用经验仍不足,且对应的工况与乘用车也有很大的区别,例如,以ACC策略为例,乘用车只有EBS制动系统,但商用车有发动机缸内制动、排气制动、缓速器制动等多种辅助制动,因此ACC过程中调用整车制动的功能策略差异明显。但总体来说,都是以保证良好的驾驶体验为基本需求,并以此评价功能舒适性。
功能评价方案见表2。
3. 网络拓扑方案
基于数据融合的ADAS系统以实现可靠的车辆控制为目标,为降低控制信号的延迟,保持决策系统与执行器系统在同一网段;同时为降低整车通讯负载,摄像头传感器和雷达传感与决策系统的交互以私有CAN方案实现。
为保持整车配置的柔性化设计,整车各控制器可裁剪应用,将整车CAN部分的两个终端电阻布置在线束的远端;而摄像头传感器与雷达传感器为私有CAN设计,该部分无需裁剪应用,为规避故障点风险,终端电阻固化于私有CAN的两个控制器内部。
以方案1的系统组成为例,网络拓扑方案可参照图2所示开展。
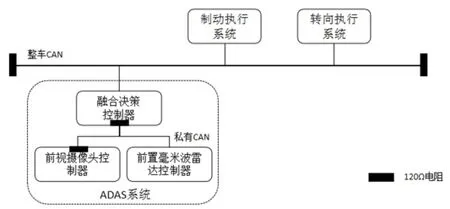
图2 融合ADAS系统网络拓扑方案示例
系统功能验证
为保持系统按照功能预期正常运行并保持长期可靠,开发过程中需开展严格的测试验证工作。在零部件软件开发阶段开展仿真测试,验证产品功能逻辑的一致性;在整车集成开发阶段开展场地测试,验证功能表现的一致性;在整车试制验证阶段开展道路测试,验证产品功能的可靠性。
1.仿真测试
基于数据融合的ADAS系统的核心是控制算法,因此单一针对控制算法的测试验证是必不可少的,即所谓的软件在环(Software-in-the-Loop, SiL)测试。通过软件模拟所有的测试环境,包括目标车辆、车辆行为、车辆运行的外部环境以及相关的传感器执行器等,将数据信息输入给ADAS系统的控制算法,以确认控制算法的功能表现。
在ADAS系统的软硬件集成后,即可开展半实物仿真的硬件在环(Hardware-in-the-Loop,HiL)测试。HiL测试中,接入真实的ADAS系统融合决策控制器及传感器,通过测试设备模拟道路和车辆环境,验证ADAS系统的外部接口和功能逻辑的一致性。
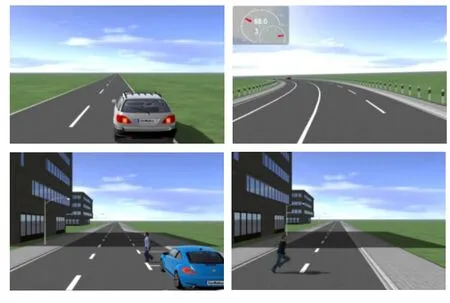
图3 融合ADAS系统仿真场景示例
2.场地测试
场地测试是系统关键性能指标的验收过程,通过主观评价及客观的数据分析来定位问题,进而优化系统功能。针对数据融合的ADAS系统,需要基于产品功能定制测试用例,根据典型功能,通常包括预警功能一致性测试、AEB标定参数验证测试、报警抑制及退出条件测试、ACC加减速性能及舒适性评价、LKA横向控制弯道性能及舒适性评价、法规项性能摸底测试等。
场地测试一般对于车辆的极端性能进行验证,车辆方面,为保证安全性,牵引车通常不带挂车载荷开展,而是根据需求加装货箱式载荷;场地方面,在保证直道加速和测试区间的基础上,需求基于ADAS系统的类型,定制不同曲率半径的弯道试验路;设备方面,场地测试一般需求基于差分定位功能的GPS系统、图像化二维坐标的场地路线、自动计算TTC的测试系统、具备标准形态及雷达反射能力的气球车/人及对应的拖曳系统等等,以便实现精准的TTC计算,并对照ADAS系统的自主测算,验证系统感知和执行的精确度。基于以上测试条件,参照经过严格设计的测试用例,可实现典型工况下产品性能的确认,标志着ADAS系统的成熟度达成可路试的技术水平。
3.道路测试
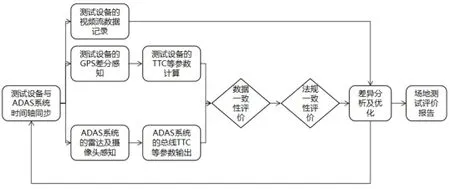
图4 融合ADAS系统场地测试流程示例
道路测试是系统功能一致性和可靠性的验收过程,通过累计的数据统计积累,分析误报、漏报事件概率,从而对系统功能风险进行评价。针对重卡的营运属性,道路测试的路线设计,需要充分考虑地理因素的影响,因此山道、城乡、省道、高速、隧道等路况均需求有不同程度的覆盖;为验证环境因素影响,过程中需保证一定程度的清晨、傍晚、夜间里程,同时需求不同角度的对照阳光直射的环境;恶劣的天气环境,是对ADAS系统的一种极端考验,但在路试过程中雨雪雾等天气可遇不可求,需求根据天气预报动态微调路线。
在路试开展中,基于试验需求,一般选择米字形的放射状路线,并设立专项保障团队,充分策划好安全风险和维修便利性;同时加装辅助探测的雷达和摄像头等记录系统,留存全过程的数据及影像资料,为路试过程中的误报、漏报事件分析提供参照。
结语
基于数据融合的ADAS系统同时具备雷达和摄像头传感器的优点,具备识别精准、误报率低等技术特征,在交通法规政策和消费者内在需求等因素驱动下,其在重卡的应用将迎来爆发式增长。为避免因为ADAS系统的误动作导致的交通安全风险,必须在设计开发过程中开展可靠的方案设计和完善的测试验证,以最大程度发挥ADAS系统的优势,为重卡的安全运营保驾护航。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
军民两用技术与产品(2022年5期)2022-06-28
汽车实用技术(2022年11期)2022-06-20
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年12期)2022-01-18
小学生学习指导(低年级)(2018年12期)2018-12-29
汽车观察(2018年10期)2018-11-06
小学生导刊(高年级)(2016年11期)2016-11-14
汽车观察(2009年7期)2009-08-12
网络与信息(2009年6期)2009-07-31
