
一种垃圾清扫的设计思路
2020-10-26 01:11烟台海德专用汽车有限公司孙晓强李哲徐元鹏姜东利
专用汽车 2020年10期
烟台海德专用汽车有限公司 孙晓强 李哲 徐元鹏 姜东利
介绍了一种新型的扫路模式,对未来的扫路模式实现智能清洁提供了一种参考。本方案可利用无人机提前侦测,定点定位,分辨物体形状,对垃圾分类起到关键作用。
近年来,我国城市主干道已经基本实现机械化清扫作业,但是城市辅道及人行道由于道路狭窄,大型清扫车无法进入清扫,主要采用人工清扫,作业效率低,特别在落叶季节,大量的树枝树叶掉落在城市辅道及人行道上,树叶、垃圾四处飘散随风而动,严重影响城市美观。
随着私家车的数量逐年增加,私家车停靠在路边的停车位上,垃圾或树叶随风而来,由于涡流的作用垃圾可以停留在车下挡风的地方,不易被发现,而常规清扫作业车或清扫设备无法对车辆底部垃圾进行清扫,需通过人工清除,不仅成本高,容易划伤车辆,引发争执,而且在清扫区域有限的情况下,空间较小的车底清扫比较困难,人工无法观察到清扫区域的垃圾多少或者具体位置以及物品种类和形状,给清扫带来不便。
智能垃圾清扫设计思路
现有技术的清扫设备,一般都是通过机械化进行清扫,对空旷无障碍的场地适用于大型清扫设备,但是对于路边的临时停车位及周边基础设施,空间狭小位置的清扫还是需要人工检查和清扫,或是由人工背负吸收器操作设备进行清扫作业,整个过程需要人工对路面状况进行检查和预判后,再进行清扫作业,并且在清扫作业过程中和清扫完成后也都是完全通过人工进行操作,只能实现半自动化清扫,无法实现全自动清扫作业,清扫后的效果无法精确监控,且人工操作清扫设备导致清扫效率较低。因此,笔者提出一种全新的设计思路,以克服现有技术的缺陷。
实施方案
随着社会的不断进步,5G网络给人们提供了新的体验,笔者设想开发一部清扫设备,采用5G 信号控制系统,包括无人机监测系统、清扫系统、雷达监测系统、信息采集系统、控制系统和无线充电系统。无人机监测系统可用于对路面垃圾情况进行监测定位并将监测数据转化为信号传输至清扫系统,为清扫系统提供执行指令;清扫系统接收无人机监测系统的指令并根据指令进行分析进而对路面进行清扫。根据上述分析该清扫设备主要分为两部分。
1.无线控制系统
一部清扫设备一般都有固定清扫区域,当清扫设备将要抵达清扫区域时,可提前将固定于驾驶室顶部的无人机通过人工发送起飞信号,无人机接收到起飞信号后,开始做起飞准备。无人机自动发送打开固定装置,固定装置接到信号后打开,无人机起飞,并按照预设的路线低空飞行,飞行过程中可自动规避飞行路线上的障碍物,通过其自身所带的雷达监测器、摄像头等自动识别物体形状,提前侦测路边车下是否存有垃圾,经过控制器处理后将信号发回车载控制器,车载控制器根据无人机控制器发回的垃圾信号,如树叶、塑料瓶、石块等不同的垃圾形状及位置作出处理方案;同时在清扫设备的多功能显示屏上,操作人员可以根据辨识到的垃圾形状及位置,使车辆行至垃圾定位点,再将清扫设备上所带的伸缩机构通过人工或自动控制,送出到路边车辆的底部,根据垃圾种类进行分类,分别收集进清扫车辆或清扫设备的分类垃圾箱。工作完成后无人机自动回到清扫设备顶部,停留于固定装置上。固定设备可以是一个固定架,固定架上设有自动锁固装置。固定设备通过控制器发送信号至车载控制器,锁固装置自动锁紧,避免因车辆移动致使无人机掉落,并可检测是否需要充电,如需充电,无线充电感应系统将与无线充电设备自动感应充电。控制系统流程图如图1所示。
2.清扫设备工作原理
清扫设备的前端挂有伸缩机构,伸缩机构包括依次顺序连接的挂载部、转动部、伸缩部和清扫部;挂载部用于连接底盘和支撑转动部,可带动转动部、伸缩部及清扫部上下移动;转动部可以带动伸缩部及清扫部左右转动,伸缩部前端连接转动部,后端与清扫部连接并可带动清扫部相对挂载部旋转;清扫部可相对于转动部旋转。清扫机构与底盘之间的连接如图2所示,清扫机构与底盘之间的连接如图3所示。
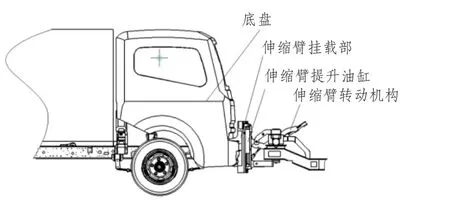
图2 清扫机构与底盘之间的连接

图3 清扫机构与底盘之间的连接
挂载部固定在底盘的防撞梁上,挂载部侧边设有提升油缸,可以将工作后的曲臂机构提升至倾斜状态,转动部带有定位电机,各曲臂伸缩部连接处同时带有电机,在清扫部前端设有带动扫刷的电机,清扫部下侧带有滚轮,以起到支撑清扫部的作用,在曲臂伸缩部内部装有波纹伸缩管与末端的清扫部连接前部与垃圾箱的分类机构连接。
转动臂与清扫部工作时呈现“一”字或“S”型排列,最后一个转动臂上安装清扫部,两个相互连接的转动臂之间是可以相对旋转,通过驱动电机控制转轴旋转,实现转动臂的相对旋转,最前端的清扫部以转动架为中心,以转动臂的整体长度为半径的区域进行清扫作业,而且可以旋转360°,保证整个区域范围内的各个位置都可以实现清扫,且清扫位置可以根据垃圾的位置进行任意调节,既可实现单点的清扫,也可以实现整个区域的整体清扫,控制灵活。
3.设计优点
上述设计的优点在于:
a.伸缩机构日常操作方便快捷,无任务时可以挂在车上,不影响行车;
b.当路边车下有垃圾时,可以提前预知,车辆行驶至垃圾处,伸缩机构可以将曲臂伸至车辆底部,将垃圾按分类送至垃圾箱;
4.设计缺点
上述设计的缺点在于:
a.单体设计对轻量化的要求较高,需要在轻量化材料选择方面或者借助有限元分析进行结构轻量化优化设计方面加大研发力量,最终的产品状态应该是功率质量比越大越好。
b.对各关节驱动电机功率质量比有更高的要求,理想状态是将机械机构与电机集成,通过集成化增加空间利用率,降低电机质量占比;
c.各关节控制灵活性和可靠性对软件编程人员技术要求较高;
d.光学识别系统发展水平目前还无法实现无人机对垃圾的精确识别,目前还依赖于光学识别软硬件的发展水平。
可靠性试验
针对上述伸缩臂方案,笔者主要从机械本体结构和电控方面做了大量可靠性和可实现型验证。
1.机械本体部分
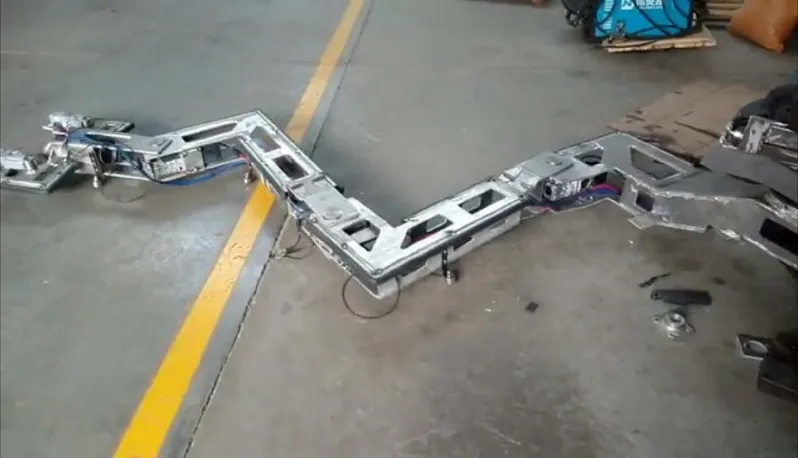
由于伸缩臂结构工作场景特殊,故其对轻量化的要求比较高,其机械结构全部展开状态下可达3.5m。试验最初阶段,采用铝合金5083,试验过程发现产品根部上下平移机构加上电机后发生弯曲现象,经反复试验,最终确定上下平移机构材料采用Q345钢板,其他位置伸缩机构仍然采用轻量化材料铝合金5083。由于关节处需要频繁动作,且工作场合会出现路面不平导致伸缩臂频繁晃动的情况,故在每个关节处笔者都采用了贴应变片测量应力状况,并测量机械主体在电机全部工作状态下的整体震动频率。试验数据采集后,笔者借助有限元分析进行相应的应力和变形仿真,最终在关节关键处采用了铝合金包钢套的形式提高结构强度;伸缩臂也通过模态仿真保证其整体震动频率不会与电机震动频率产生共振;对于局部无法加强的位置,笔者改变初始设计的全悬臂状态,在关键位置增加万向滚轮解决了强度问题,最终实现了产品在结构强度方面的可靠性。
2.电控方面
电控方面主要针对动作实现进行了大量的试验验证,最初所有关节处的电机都采用直流无刷电机,但实际动作时发现,该类电机很难实现精确控制,每一个关节处产生的微小转动角度误差最终累计到扫刷端都可能导致大的位置偏移,经过反复验证,最终确定采用控制精度能达到要求的伺服电机,电机安装位置也进行了特殊定制。
设计时的注意事项
设计过程中需注意以下几点:
a.综合考虑使用场景。通常轿车底盘比较低,一般两轮之间离地高度150~200mm,设计时考虑到需要留有足够的安全余地,故按照120mm的高度设计;
b.考虑底盘接近角。设备装在前防撞梁上接近角不能过小,此装置按照11°设计;
c.考虑设备下降和提升速度每秒不能超过13m;
d.设备伸展速度和移动速度可以按每3min清理一个轿车底部,通过调整控制系统程序;
e.考虑设备搬运及快速装卸的整体质量不可超过25kg,连接装置可以与其他的附加设备通用,装卸时可以采用两人搬抬或采用平叉车搬动。
结语
当今时代互联网发展极快,设计人员如不能采用“互联网+”的思路将会被时代远远地淘汰。人工智能将成为一种新的浪潮,人工智能应用于环卫设备的范围会越来越广,如何将新兴技术应用于生产实践是技术工程师应该思考的新的问题。

猜你喜欢
军事文摘(2022年8期)2022-11-03
汽车实用技术(2022年16期)2022-08-31
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
汽车实用技术(2022年9期)2022-05-20
防爆电机(2022年2期)2022-04-26
哈哈画报(2021年11期)2021-02-28
家教世界·创新阅读(2016年9期)2016-05-14
股市动态分析(2015年24期)2015-09-10
科学启蒙(2009年12期)2009-12-15
