基于蜂群测控资源智能管控的无人机区域组网技术研究
2020-10-28 07:12贺渝兵曾国奇孙志刚
无线电工程 2020年11期
贺渝兵,曾国奇,宗 茂,孙志刚
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.北京航空航天大学 无人系统研究院,北京 100191)
0 引言
近年来,随着越来越多的大型无人机平台、遥感载荷、空中遥感控制子系统及地面数据接收等方面关键技术的突破,标志着我国高端无人机遥感系统产业化的开端,填补了民用无人机遥感领域的空白[1]。2008年5月,四川汶川地震中,无人机航拍视频影像为制定抗震救灾方案提供了科学依据[2]。任务分配使得有限的遥感应用资源发挥最大的使用效能[3]。考虑使用无人机蜂群构成应急指挥系统网络成为了重要的组网应用解决方案[4]。
随着无人机编队组网技术的迅速发展,无人机协同组网应用领域迎来宝贵机遇[5],特别是在面向任务的蜂群测控资源管控领域的应用[6],蜂群组网技术的研究带来了新的融合与发展,为无人机蜂群遥感提供了有利工具[7-8]。传统无人机遥感信息采用单无人机平台、单一载荷平台、单一传感器和固定角度作业方式,对目标的描述能力不足以支撑立体成像、协同遥感等应用。本文基于高频次迅捷无人机区域组网遥感信息获取的观念,在保留了传统光学传感器遥感信息平面观测技术的基础上,更强调符合空间遥感对地观测领域发展趋势的异构无人平台、轻小型商用飞行器光学相机、长航时轻小型高分辨率SAR成像、浮空平台广域全景监视影像多源数据融合方式,获取生态环境、洪涝灾害和国土安全的应急观测信息,能够从根本上解决传统遥感信息由于对应急减灾观测能力不足而导致的诸多应用难题[9]。深入挖掘航空遥感组网对地观测的应用潜力,实现无人航空器遥感观测网络对生态环境、洪涝灾害和恐怖袭击事件的高频迅捷观测,提出了无人航空器与传感器资源的适配指标体系,对有效指导各个应急减灾活动中无人航空器资源的有效配置有着重大意义。
1 蜂群测控资源智能管控方法分析
1.1 面向任务的蜂群无人机飞行任务规划技术
面向任务的蜂群无人机飞行任务规划涉及的技术难点包括自主编队、队形保持、队形重构和覆盖评估。首先采用无人蜂群飞行任务规划算法依据遥感任务要求、飞行平台能力、任务载荷工作方式自动生成预设飞行航线,飞行过程中通过组网数据链实时生成飞行重规划自动生成重规划飞行航线,解决异构无人平台遥感任务能力存在的差异[10]。依据蜂群无人机平台飞行任务解算能力设计蜂群无人机编队保持和评估策略,分别控制采取平台自主保持和编队重规划航点保持策略,消除飞行过程中由于受到外部干扰产生的队形位置偏差,或者当任务需求变化或者蜂群中单台无人机突发故障时,实现实时和可靠的蜂群无人平台的队形保持、队形重构和覆盖评估。
面向任务的蜂群无人机飞行任务规划涉及的规划算法包括“长机-僚机”跟随、蔽障决策和虚拟位置点。所有蜂群无人机预先状态航路依次起飞,并在指定时刻和指定空域构成松散队形,蜂群飞行任务规划实施控制蜂群无人机形成对地区域进行搜索和侦察的能力,以确保多无人机在多任务执行过程中的协同性[11]。根据蜂群无人平台计算能力的不同,由特定无人平台作为长机,接收飞行任务规划预设航路、任务控制策略和接收操作员直接控制命令,僚机的控制策略设置为根据长机位置、航向和对应要求计算本机的相对位置,实现蜂群无人机队形保持、规避障碍物和虚拟位置导航,从而提高蜂群无人机任务执行效能。
目前民用无人机通常仅携带可见光摄像机即可满足航拍、遥感等简单任务,但军事、商用领域高端无人机为了实现对特定区域的遥感任务,通常需要携带多种传感器载荷来满足任务区域滞留时间、扫描重叠率等条件。不同传感器的作用范围不同,电子探测载荷往往作用距离远,但是分辨率较低;SAR雷达载荷作用距离远,但工作模式为侧视;地质、气象探测类载荷工作方式特殊,工作距离差距较大。无人机任务载荷规划需要在满足最远飞行距离的约束情况下,对无人机飞行的高度、速度和载荷开关动作等航线属性进行优化配置,避免任务载荷的重复动作,提高无人机执行任务的可靠性和安全性。
针对光学载荷的遥感任务进行无人机任务载荷规划设计,光学载荷针对不同类型任务目标的遥感方式也不相同,任务目标主要分为点式目标和区域目标2类。
点式目标是指单次或较少的拍摄次数即可完成整体目标范围遥感覆盖的小范围区域目标,主要应用于固定点遥感监视。点式任务目标的载荷覆盖可以采用盘旋和“穿越迂回”2种方式:采用盘旋方式探测单点目标时,无人机在任务区域需要持续改变载荷云台方位角与俯仰角,实现载荷视角始终保持在任务区域;而采用“穿越迂回”方式探测时,改变无人机状态过于频繁且覆盖时间不够,有部分运行区间无法完成载荷覆盖,现在已经较少使用,大部分采用任务区域盘旋或者直接穿越任务区采集的模式。具体载荷覆盖方式如图1所示。

图1 针对单点任务目标的载荷覆盖方式Fig.1 Payload coverage for a single point of mission
为了最大化利用无人机任务执行性能,针对点式目标的任务较少,多数是针对区域目标的载荷任务。区域任务目标是指需要多次循环扫描才可完成整体目标范围探测覆盖的范围区域目标,主要有航拍采集、灾害评估、区域搜索等应用。针对区域目标的载荷覆盖方式有很多,常见的有光栅扫描、盘旋扫描和迂回扫描等方式,如图2、图3和图4所示。
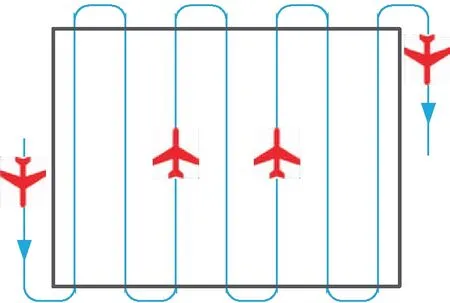
图2 针对区域任务目标的光栅扫描载荷覆盖方式Fig.2 Raster scan load coverage mode for regional mission targets
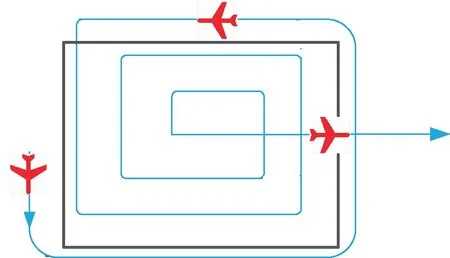
图3 针对区域任务目标的盘旋扫描载荷覆盖方式Fig.3 Hovering scan load coverage mode for regional mission targets
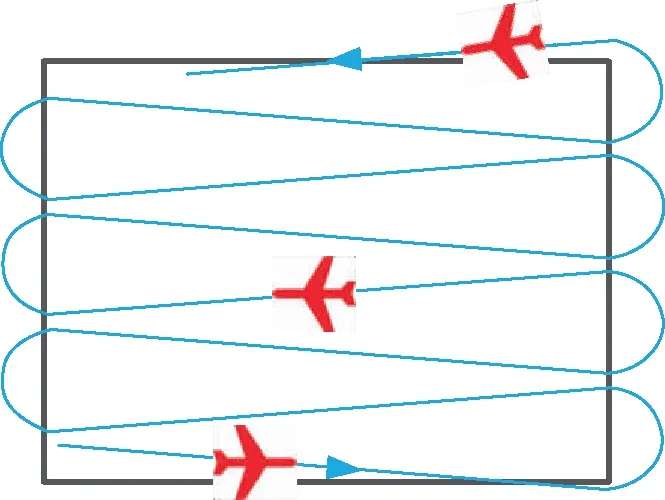
图4 针对区域任务目标的迂回扫描载荷覆盖方式Fig.4 Roundabout scanning load coverage for regional mission targets
其中,光栅扫描和盘旋扫描2种载荷覆盖方式主要用于完成一定横向重叠率的全区域覆盖,而“迂回”扫描式载荷覆盖方式可以满足搜索任务区域垂直于扫描方向且满足于一定速度范围的移动目标搜索任务。
根据遥感目标区域要求,气候禁飞区、环境等要求,将遥感任务分配到多个无人机,完成多任务的分配,如图5所示。

图5 多点多任务分配软件界面Fig.5 Multipoint and multitasking software interface
1.2 蜂群无人机飞行任务实时监控技术
针对蜂群无人平台载荷功能限制和个体任务互补性特点,设计蜂群无人平台采用集中控制、分布控制和独立控制方式,需要解决资源共享、通信协同、任务分配和避障防撞等问题,飞行任务规划实现分为3个层次,包括组织协调层、指令执行层和任务决策层。蜂群指挥中心实时监控蜂群无人机平台,采用蜂群飞行任务规划算法,实现自主编队、队形保持、队形重构和覆盖评估。蜂群无人平台组网数据链实时传输无人协同状态、协同命令。协同控制策略和算法分别集成在蜂群控制中心和蜂群无人平台,实现蜂群无人机飞行任务实时监控任务,如图6所示。
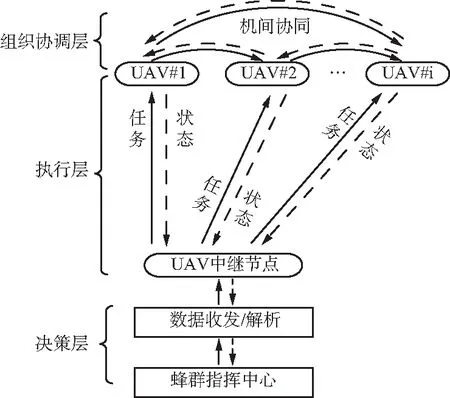
图6 蜂群无人平台控制系统结构Fig.6 Control system structure of unmaned bee colony platform
当无人机上行遥控指令被认为是正常接收和响应条件下,遥测数据作为飞行任务实时监视依据时,有必要以遥控指令和目标无人机的六自由度模型为依据,以遥控指令作为六自由度模型的输入,六自由度模型的输出作为与当前遥测数据比对的依据,如图7所示。
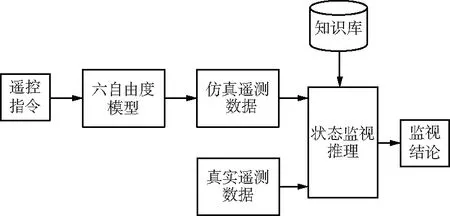
图7 遥控指令推测遥测数据流程Fig.7 The remote command predicts the telemetry data flow
在前期的工作中,已建立起了一套较为完善的蜂群无人机六自由度数学模型,通过无人机数学模型与真实无人机飞行状态的同步仿真,不断输出仿真遥测状态数据作为比较的依据。当然,仿真遥测数据与真实飞行遥测数据的相等属于同一个上下界范围意义的相等,上下界的确定则直接依赖于监视专家系统的知识库,如图8所示。

图8 飞行任务实时监视软件界面Fig.8 Flight mision real-time monitoring software interface
1.3 蜂群无人机任务分发应用技术
蜂群无人机任务分发应用示意如图9所示。
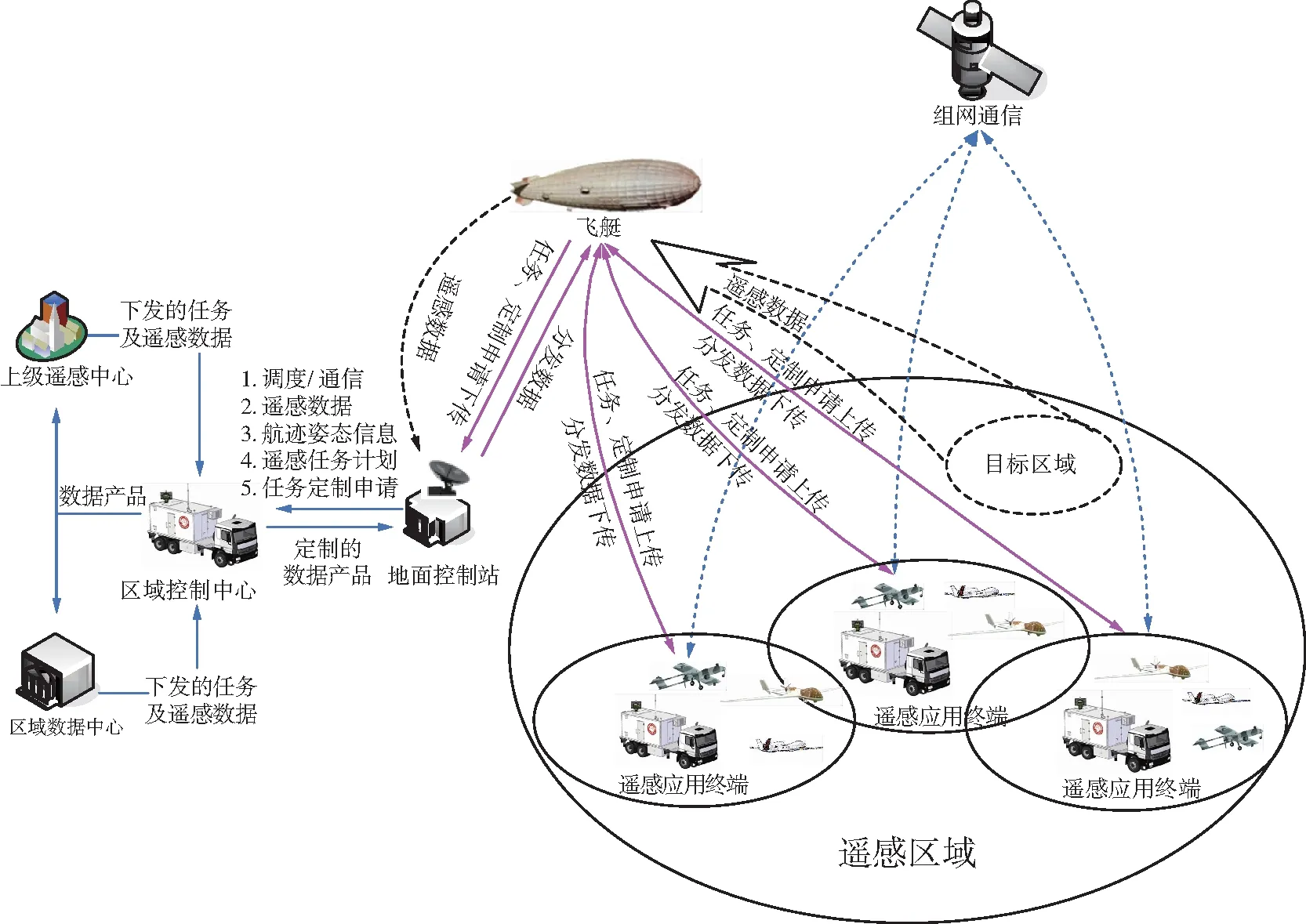
图9 遥感任务数据分发应用示意Fig.9 Schematic diagram of situation information distribution application
任务分发系统由指挥中心、区域分中心和临场指挥中心三级遥感观测区域组网动态协同控制系统组成。临场指挥控制系统包括浮空平台遥感应用系统和区域遥感应用系统组成,其中遥感数据无线分发由遥感应用产品地面终端、机载终端以及用户应用终端组成,数据终端和用户应用终端由收发信机、计算机以及遥感软件组成。
数据终端部署于遥感应用轻小型无人机、长航时无人机及飞艇等异构无人平台机载终端上,用户应用终端是地面固定式以及车载式控制站,依据蜂群无人平台应用于生态环境、洪涝灾害和国土安全的应急观测的不同需求,通过接收用户应用终端的遥感定制申请,并将遥感调度命令、遥感观测数据、无人平台位置信息技术飞行任务规划等转发给用户应用终端,用户应用终端结合地理信息数据库,以三维的方式动态显示遥感数据覆盖率和遥感区域信息,包括蜂群无人平台航迹、载荷覆盖区域及覆盖率分析等。同时各级用户应用终端还可以根据蜂群无人机平台组网方式实现即时通信和遥感信息共享,提高任务分发效能。
1.4 蜂群无人机任务自组网技术
根据蜂群无人机协同组网的遥感观测模式和应用需求,研究建立由物理层、数据链路层、网络层构成的蜂群无人机数据链自适应网络层次架构,构建具有可扩展的、高动态的网络局部同步的自适应蜂群数据链网络体系[13]。
蜂群无人机自组网技术包括网络同步、节点入网、节点退网和信息资源分配。蜂群内节点根据长机节点进行同步,由入网节点发送入网、退网申请,长机接收应答后入网、退网成功,蜂群节点采用竞争方式实现入网、退网请求,蜂群节点由控制站对各个节点的信道资源申请进行处理和分配,并将结果下发至各个蜂群节点。
蜂群测控动态组网协议示意如图10所示。接入阶段网络时间基准节点周期性发送接入轮询帧,询问是否有节点需要接入。机载通信设备入网时首先侦听信道,收到网络时间基准节点发送的接入轮询帧后随机发送入网请求。如果2套机载通信设备同时发送请求帧、发生碰撞,网络时间基准节点不能正确接收,则在下个帧周期继续发送请求。网络时间基准节点收到接入请求帧后,根据当前时隙情况为每个节点分配传输时隙,并发送接入确认帧。机载通信设备收到接入确认帧后,提取自己的时隙信息,完成入网过程。
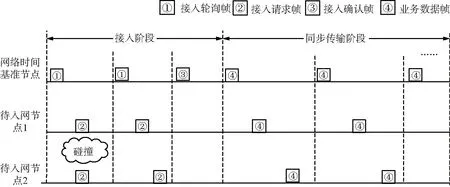
图10 蜂群测控动态组网协议示意Fig.10 Data link dynamic networking protocol flow chart
由以上入网过程可以看出,新节点入网的时间以时帧周期为单位,在收到络时间基准节点周期性发送的接入轮询帧后,若网络容量为满,则待入网节点最快为2个时帧周期即可入网,若新入网节点数过多发生碰撞或是随机不发送入网请求,则最长不超过4 s。同步传输阶段网络每个用户在自己的传输时隙中发送数据业务,实现无碰撞数据传输。
1.5 面向任务的蜂群测控资源智能调度原理样机
面向任务的蜂群测控资源智能调度原理样机包括3个席位,分别是蜂群无人机协同演示飞行任务规划席位、指挥控制席位和编队控制三维可视化仿真控制席位。这3个席位共同构建一套演示环境,演示蜂群无人机编队从复杂环境建模、探测模式确认、编队组建、目标分配、任务规划、编队飞行、编队变换、编队协同、遥感任务分发、协同遥感探测到安全返航的全过程。
面向任务的蜂群测控资源智能调度原理样机系统接口如图11所示。
(1)3个屏幕部署跨3屏的三维软件
① 监视一个编队的所有无人机的飞控和载荷状态;
② 一个编队无人机数量最大为12架;
③ 默认界面全编队无人机监视页面,可以在单机监控界面和全编队监控界面间切换;
④ 飞行控制指令仅能对编队领航无人机进行操纵,载荷控制指令可以对编队内任意无人机进行操作;编队无人机监视页面包含常用的载荷操纵指令,领航无人机包括常用的飞行控制指令和载荷控制指令;
⑤ 飞控监视参数包括:位置、三姿和速度等;
⑥ 载荷设备包括光电摄像机和成像雷达,监视内容包括:摄像头方位角、俯仰角、视场角、雷达工作状态和视频图像等;
⑦ 支持3种工作模式:自主飞行、指令飞行和手动操纵。自主飞行:根据预设航线进行飞行,从指令飞行或手动操作模式切回自主飞行模式时,需要选择距离最近的航点切入并继续后续飞行;指令飞行:包括左飞、右飞、直飞、爬升、下降和平飞等指令;手动操纵:通过油门台实现无人机速度的改变,通过飞行操纵杆实现航向角和俯仰角的控制;
⑧ 可以通过切换按键实现一个摇杆对无人机和载荷设备的交替控制;
⑨ 载荷设备的控制包括:摄像头转动、视场角放大、视场角缩小和开关机;
⑩ 飞行控制指令包括:起飞、返航等。
(2)立屏幕部署飞行任务规划软件
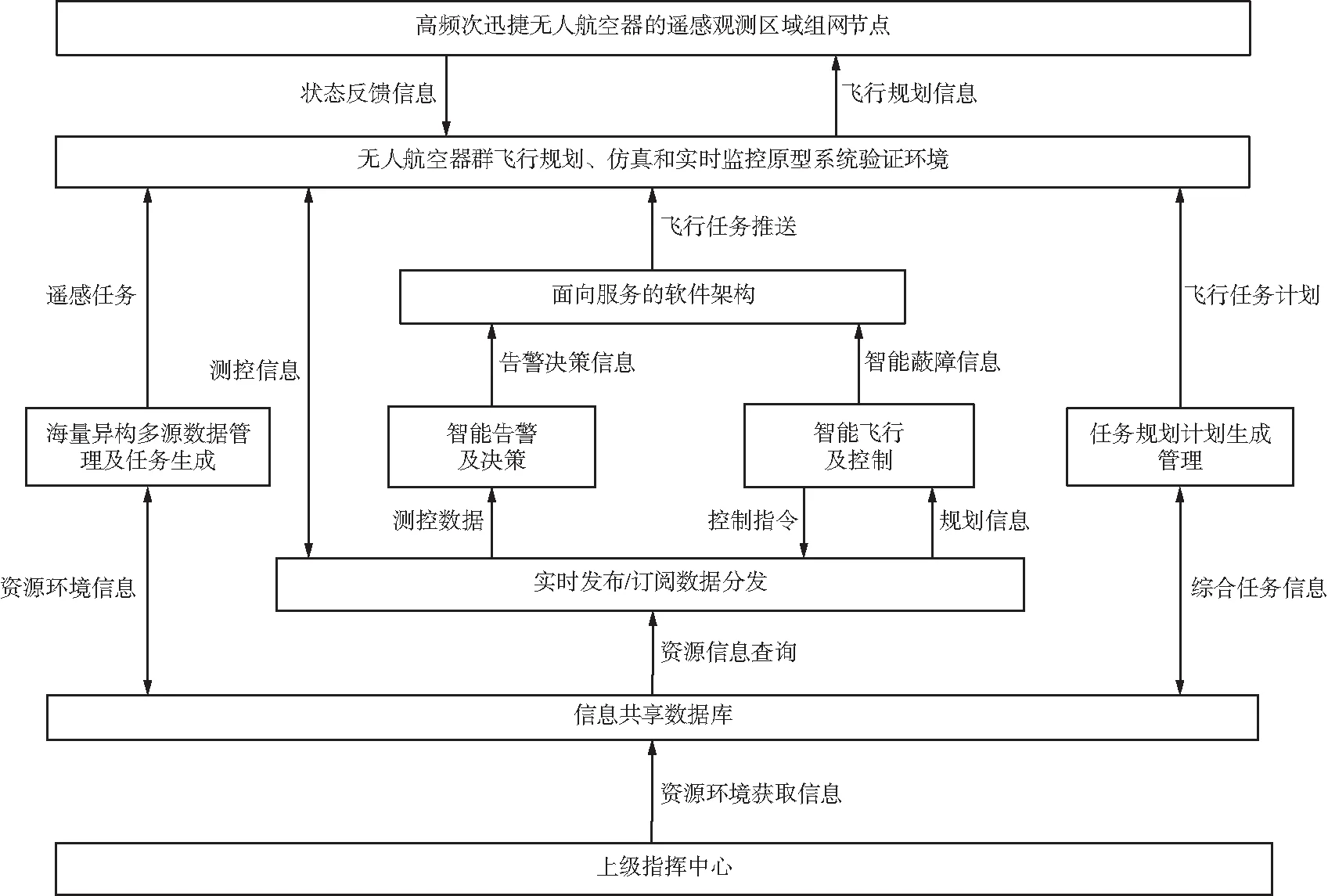
图11 原理样机系统接口Fig.11 Interface diagram of prototype system
① 设置遥感探测区、探测模式、编队数量和各编队无人机数量;
② 进行一键目标分配和任务规划;
③ 针对任务规划结果支持手动编辑修改;
④ 完成对各编队领航无人机的航线装订;
⑤ 同步遥感探测区、无人机类型、任务规划结果到任务显示软件;
⑥ 可以通过标牌形式显示各无人机的简略参数;
⑦ 可以清晰地显示领航无人机与编队无人机关系;
⑧ 地图软件的基本功能:距离量算、地图放大缩小、地图加载等基础操作。
(3)独立屏幕部署任务显示软件
① 根据任务规划结果同步显示遥感探测区、无人机类型、任务规划结果;
② 仅显示当前控制编队的无人机信息和无人机类型,全部的遥感探测区;
③ 可以通过标牌形式显示各无人机的简略参数;
④ 可以清晰地显示领航无人机与编队无人机;
⑤ 地图软件的基本功能:距离量算、地图放大缩小、地图加载等基础操作。
(4)独立屏幕部署编队控制软件
① 可以实现当前控制编队的选择;
② 维护几种常见的编队形式,各种编队形式之间可以实现任意队形变换;
③ 可以实现各席位编队控制权的切换、管理和同步。
飞行状态监控软件主界面如图12所示,主要完成对无人机的飞行状态和载荷状态的监视并完成对无人机的控制。软件主界面分为2部分,标题栏和无人机基本情况显示区。

图12 飞行状态监控软件界面Fig.12 Flight status monitoring software interface
地面控制站任务显示软件具备地图软件的基础功能,并能够基于二维地图显示任务规划结果、当前主控编队及其简略参数、飞行轨迹,软件界面如图13所示,包括菜单栏、显示区和状态栏三部分。
图13 任务显示软件界面示意Fig.13 Situation software interface diagram
飞行任务规划与飞行状态监视软件如图14所示。
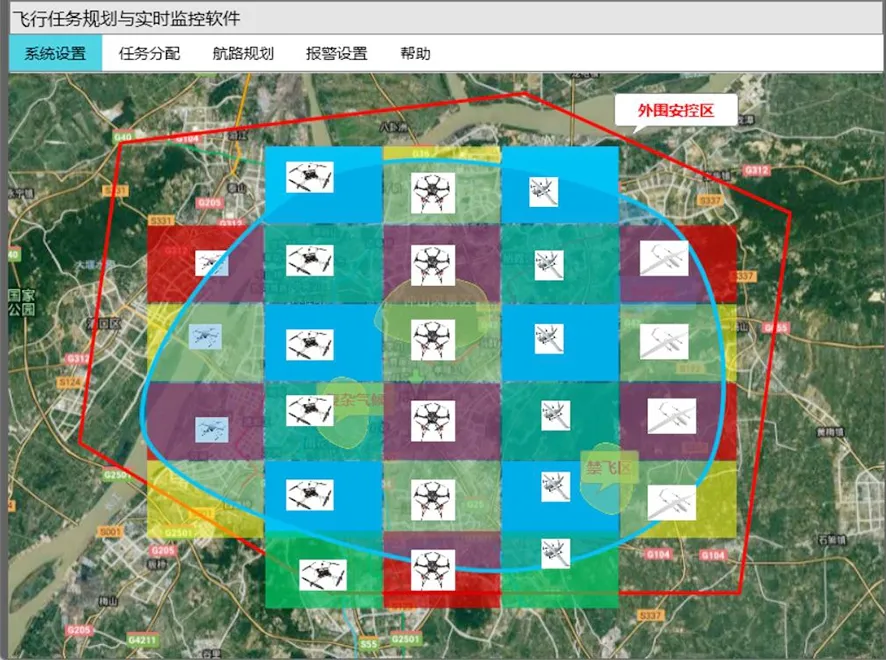
图14 飞行任务规划与飞行状态监视软件界面Fig.14 Interface of flight mission planning and flight status monitoring software
2 结束语
本文提出构成基于面向任务的蜂群测控资源智能管控系统的概念和架构,针对蜂群测控系统面向无中心化、自主化和自治化方向发展思路进行了原型系统的开发和相关技术研究,通过研究飞行任务规划技术、飞行任务实时监控技术、遥感任务分发路由技术和任务自组网技术等,实现了面向任务的蜂群测控资源智能调度原理样机。随着蜂群网络数据的增加,大容量多媒体数据的引入,实现测控资源的动态智能管控,解决海量节点组网中的资源分配问题,面向任务的蜂群测控资源智能管控技术还需要进一步深入研究。
猜你喜欢
蜜蜂杂志(2020年11期)2020-12-20
中国船检(2020年11期)2020-11-27
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
现代计算机(2016年17期)2016-02-28
农村农业农民·B版(2015年3期)2015-04-13